Das könnte Ihnen auch gefallen
- 10 1109@tie 2017 2698425 PDFDokument12 Seiten10 1109@tie 2017 2698425 PDFRiad TifaNoch keine Bewertungen
- Solar PV Array Fed Water Pumping Using BLDC Motor Drive With Boost-Buck ConverterDokument8 SeitenSolar PV Array Fed Water Pumping Using BLDC Motor Drive With Boost-Buck ConverterRiad TifaNoch keine Bewertungen
- Tertiary and Secondary Control Levels For Efficiency Optimization and System Damping in Droop Controlled DC-DC ConvertersDokument12 SeitenTertiary and Secondary Control Levels For Efficiency Optimization and System Damping in Droop Controlled DC-DC ConvertersRiad TifaNoch keine Bewertungen
- An Enhanced Droop Control Method For Accurate Load Sharing and Voltage Improvement of Isolated and Interconnected DC MicrogridsDokument11 SeitenAn Enhanced Droop Control Method For Accurate Load Sharing and Voltage Improvement of Isolated and Interconnected DC MicrogridsRiad TifaNoch keine Bewertungen
- 07418710Dokument4 Seiten07418710Riad TifaNoch keine Bewertungen
- ICREEC'2019: International Conference on Renewable Energy and Energy ConversionDokument2 SeitenICREEC'2019: International Conference on Renewable Energy and Energy ConversionRiad TifaNoch keine Bewertungen
- Control Engineering Practice: Youssef Krim, Dhaker Abbes, Saber Krim, Mohamed Faouzi MimouniDokument16 SeitenControl Engineering Practice: Youssef Krim, Dhaker Abbes, Saber Krim, Mohamed Faouzi MimouniRiad TifaNoch keine Bewertungen
- 10 1109@tie 2017 2698425 PDFDokument12 Seiten10 1109@tie 2017 2698425 PDFRiad TifaNoch keine Bewertungen
- 74 Adaptive Decentralized Droop ControllerDokument11 Seiten74 Adaptive Decentralized Droop ControllerRiad TifaNoch keine Bewertungen
- Design of Solar Water Pumping System With FCMA Soft StarterDokument4 SeitenDesign of Solar Water Pumping System With FCMA Soft StarterRiad TifaNoch keine Bewertungen
- Homer PaperDokument13 SeitenHomer PaperRiad TifaNoch keine Bewertungen
- 07038525Dokument6 Seiten07038525Riad TifaNoch keine Bewertungen
- Control Engineering Practice: Youssef Krim, Dhaker Abbes, Saber Krim, Mohamed Faouzi MimouniDokument16 SeitenControl Engineering Practice: Youssef Krim, Dhaker Abbes, Saber Krim, Mohamed Faouzi MimouniRiad TifaNoch keine Bewertungen
- 3 Maison PDFDokument6 Seiten3 Maison PDFRiad TifaNoch keine Bewertungen
- WSN 672 2017 126 148 2Dokument24 SeitenWSN 672 2017 126 148 2Amit DostNoch keine Bewertungen
- Economic Comparison of Solar PV and Diesel Water Pumping SystemDokument6 SeitenEconomic Comparison of Solar PV and Diesel Water Pumping SystemRiad TifaNoch keine Bewertungen
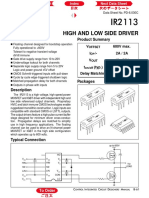
- High and Low Side Driver: Features Product SummaryDokument14 SeitenHigh and Low Side Driver: Features Product SummaryMiguel GalvánNoch keine Bewertungen
- Solar PV-Battery Based Hybrid Water Pumping System Using BLDC Motor DriveDokument6 SeitenSolar PV-Battery Based Hybrid Water Pumping System Using BLDC Motor DriveRiad TifaNoch keine Bewertungen
- PDFDokument4 SeitenPDFRiad TifaNoch keine Bewertungen
- IRFP460Dokument9 SeitenIRFP460yusufwpNoch keine Bewertungen
- Optoacoplador Integrado 4N25Dokument7 SeitenOptoacoplador Integrado 4N25aureliocsNoch keine Bewertungen
- 07041977Dokument6 Seiten07041977Riad TifaNoch keine Bewertungen
- High and Low Side Driver: Features Product SummaryDokument14 SeitenHigh and Low Side Driver: Features Product SummaryMiguel GalvánNoch keine Bewertungen
- Supplementary Load Frequency Control by Use of A Number of Both Electric Vehicles and Heat Pump Water HeatersDokument10 SeitenSupplementary Load Frequency Control by Use of A Number of Both Electric Vehicles and Heat Pump Water HeatersRiad TifaNoch keine Bewertungen
- Design and Simulation of A Photovoltaic Induction Motor Coupled Water Pumping SystemDokument8 SeitenDesign and Simulation of A Photovoltaic Induction Motor Coupled Water Pumping SystemRiad TifaNoch keine Bewertungen
- Modeling of A Number of Heat Pump Water Heaters As Control Equipment For Load Frequency Control in Power SystemsDokument7 SeitenModeling of A Number of Heat Pump Water Heaters As Control Equipment For Load Frequency Control in Power SystemsRiad TifaNoch keine Bewertungen
- Air Source Heat Pump A Key Role in The Development of Smart Buildings in Future Energy SystemsDokument6 SeitenAir Source Heat Pump A Key Role in The Development of Smart Buildings in Future Energy SystemsRiad TifaNoch keine Bewertungen
- Design and Simulation of A Photovoltaic Induction Motor Coupled Water Pumping SystemDokument8 SeitenDesign and Simulation of A Photovoltaic Induction Motor Coupled Water Pumping SystemRiad TifaNoch keine Bewertungen
- Supplementary Load Frequency Control by Use of A Number of Both Electric Vehicles and Heat Pump Water HeatersDokument10 SeitenSupplementary Load Frequency Control by Use of A Number of Both Electric Vehicles and Heat Pump Water HeatersRiad TifaNoch keine Bewertungen
- Performance Analysis of A Directly Coupled Photovoltaic Water-Pumping SystemDokument6 SeitenPerformance Analysis of A Directly Coupled Photovoltaic Water-Pumping SystemRiad TifaNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Productivity in Indian Sugar IndustryDokument17 SeitenProductivity in Indian Sugar Industryshahil_4uNoch keine Bewertungen
- Khin Thandar Myint EMPADokument101 SeitenKhin Thandar Myint EMPAAshin NandavamsaNoch keine Bewertungen
- Group 1 RDL2Dokument101 SeitenGroup 1 RDL2ChristelNoch keine Bewertungen
- Academic Transcript Of:: Issued To StudentDokument3 SeitenAcademic Transcript Of:: Issued To Studentjrex209Noch keine Bewertungen
- A Systematic Literature Review of Empirical Research On ChatGPT in EducationDokument23 SeitenA Systematic Literature Review of Empirical Research On ChatGPT in Educationgraciduttra.profNoch keine Bewertungen
- One Shot To The HeadDokument157 SeitenOne Shot To The HeadEdison ChingNoch keine Bewertungen
- Metabical Positioning and CommunicationDokument15 SeitenMetabical Positioning and CommunicationJSheikh100% (2)
- Detect Organic Elements with Sodium FusionDokument10 SeitenDetect Organic Elements with Sodium FusionMukundNoch keine Bewertungen
- Eng Listening Integrated Hkdse2022 UmayDokument21 SeitenEng Listening Integrated Hkdse2022 UmayHoi TungNoch keine Bewertungen
- 056 Set 1 C ChemistryDokument16 Seiten056 Set 1 C ChemistryEepen JohnNoch keine Bewertungen
- Detailed Lesson Plan in Science 10Dokument7 SeitenDetailed Lesson Plan in Science 10Glen MillarNoch keine Bewertungen
- Dravyaguna VijaDokument1.095 SeitenDravyaguna VijaSilas Chagas100% (1)
- Expansion Analysis of Offshore PipelineDokument25 SeitenExpansion Analysis of Offshore PipelineSAUGAT DUTTANoch keine Bewertungen
- Engb546 NP RevisedDokument5 SeitenEngb546 NP RevisedRafaelaNoch keine Bewertungen
- B.A./B.Sc.: SyllabusDokument185 SeitenB.A./B.Sc.: SyllabusKaran VeerNoch keine Bewertungen
- Review Unit 10 Test CHP 17Dokument13 SeitenReview Unit 10 Test CHP 17TechnoKittyKittyNoch keine Bewertungen
- 202002Dokument32 Seiten202002Shyam SundarNoch keine Bewertungen
- DocuCentre IV C4470 3370 2270 BrochureDokument8 SeitenDocuCentre IV C4470 3370 2270 BrochureRumen StoychevNoch keine Bewertungen
- Sample Front Desk Receptionist ResumeDokument5 SeitenSample Front Desk Receptionist ResumeReyvie FabroNoch keine Bewertungen
- Absolute TowersDokument11 SeitenAbsolute TowersSandi Harlan100% (1)
- PbisDokument36 SeitenPbisapi-257903405Noch keine Bewertungen
- Planning Levels and Types for Organizational SuccessDokument20 SeitenPlanning Levels and Types for Organizational SuccessLala Ckee100% (1)
- Critters Table MannersDokument3 SeitenCritters Table Mannersapi-248006371Noch keine Bewertungen
- Edwards 1999 Emotion DiscourseDokument22 SeitenEdwards 1999 Emotion DiscourseRebeca CenaNoch keine Bewertungen
- Reducing Work Related Psychological Ill Health and Sickness AbsenceDokument15 SeitenReducing Work Related Psychological Ill Health and Sickness AbsenceBM2062119PDPP Pang Kuok WeiNoch keine Bewertungen
- Q-Win S Se QuickguideDokument22 SeitenQ-Win S Se QuickguideAndres DennisNoch keine Bewertungen
- New Manual of Fiber Science Revised (Tet)Dokument43 SeitenNew Manual of Fiber Science Revised (Tet)RAZA Khn100% (1)
- Multiple Choice Test - 66253Dokument2 SeitenMultiple Choice Test - 66253mvjNoch keine Bewertungen
- Influence of Contours On ArchitectureDokument68 SeitenInfluence of Contours On Architecture蘇蘇Noch keine Bewertungen