Das könnte Ihnen auch gefallen
- Lista de EquiposDokument292 SeitenLista de EquiposBruno AguilarNoch keine Bewertungen
- Calculo de Faja y Desarrollo de TornilloDokument49 SeitenCalculo de Faja y Desarrollo de TornilloBruno AguilarNoch keine Bewertungen
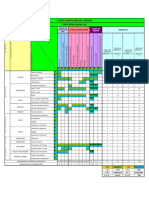
- Plan de Mantenimiento Preventivo de Equipos de Produccion - IggamDokument1 SeitePlan de Mantenimiento Preventivo de Equipos de Produccion - IggamBruno AguilarNoch keine Bewertungen
- Cronograma ConstanciaDokument2 SeitenCronograma ConstanciaBruno AguilarNoch keine Bewertungen
- Curriculum Javier SaldañaDokument6 SeitenCurriculum Javier SaldañaBruno AguilarNoch keine Bewertungen
- Planos de Sistema Transportador Neumatico ConstanciaDokument1 SeitePlanos de Sistema Transportador Neumatico ConstanciaBruno AguilarNoch keine Bewertungen
- Polines SimDokument10 SeitenPolines SimBruno AguilarNoch keine Bewertungen
- K171-C2-GyM - SGC.PC - Lab.001 Analisis Granulometrico de Suelos Por TamizadoDokument13 SeitenK171-C2-GyM - SGC.PC - Lab.001 Analisis Granulometrico de Suelos Por TamizadoBruno Aguilar100% (1)
- Matriz de LeopoldDokument5 SeitenMatriz de LeopoldBruno AguilarNoch keine Bewertungen
- K171 C2 GyM - SGC.PC - Lab.003 Procedimiento Proctor ModificadoDokument17 SeitenK171 C2 GyM - SGC.PC - Lab.003 Procedimiento Proctor ModificadoBruno AguilarNoch keine Bewertungen
- Peso EspecificoDokument11 SeitenPeso EspecificoEleazar AlbiterNoch keine Bewertungen
- Apuntes Harneado Moliena y ClasificacionDokument45 SeitenApuntes Harneado Moliena y ClasificacionJohnny A. A. GarridoNoch keine Bewertungen
- CALORIMETRIADokument10 SeitenCALORIMETRIAOmar Barrera CastroNoch keine Bewertungen
- Cuestiones Tema6Dokument2 SeitenCuestiones Tema6CjNoch keine Bewertungen
- El ElectroscopioDokument8 SeitenEl ElectroscopioFelipe Chavez CortesNoch keine Bewertungen
- Astm C 1116 Fibraespanol PDFDokument8 SeitenAstm C 1116 Fibraespanol PDFYoan Riffo ValleNoch keine Bewertungen
- Fisicoquimica P1Dokument11 SeitenFisicoquimica P1Paul Silva GalvezNoch keine Bewertungen
- Cubeta de OndasDokument10 SeitenCubeta de OndasOrlando Leguizamon LeonNoch keine Bewertungen
- Lubricante Golden Bear RematerisadoDokument11 SeitenLubricante Golden Bear RematerisadoMarlon MuzoNoch keine Bewertungen
- Practica PDC y CBR Inalterado-Jose Leonardo OrtizDokument14 SeitenPractica PDC y CBR Inalterado-Jose Leonardo OrtizValeria OrtiizNoch keine Bewertungen
- 08 - Flujo de Los Fluidos - Ejercicios de Continuidad PDFDokument9 Seiten08 - Flujo de Los Fluidos - Ejercicios de Continuidad PDFDiana MontoyaNoch keine Bewertungen
- Taller Fenómenos OndulatoriosDokument3 SeitenTaller Fenómenos OndulatoriosSebastian AldanaNoch keine Bewertungen
- SUSTANCIAS QuiimicasDokument30 SeitenSUSTANCIAS QuiimicasSilver AngelNoch keine Bewertungen
- 8 Guias Phet Cargas ElectricasDokument1 Seite8 Guias Phet Cargas ElectricasjeronimomoraaraujoNoch keine Bewertungen
- Sensor Es PDFDokument139 SeitenSensor Es PDFAndrés Sebastián MorenoNoch keine Bewertungen
- Tratamiento Terciario de Aguas ResidualesDokument9 SeitenTratamiento Terciario de Aguas ResidualesVictor Santa cruzNoch keine Bewertungen
- Taller en ClasesDokument2 SeitenTaller en ClasesLuis Santiago Castro JaimesNoch keine Bewertungen
- Riesgos Eléctricos y MecánicosDokument11 SeitenRiesgos Eléctricos y Mecánicosclara patricia villabonaNoch keine Bewertungen
- Rejilla de Biología (Energía Celular)Dokument7 SeitenRejilla de Biología (Energía Celular)EstebanNoch keine Bewertungen
- Ejercicios Equilibrio Redox 2Dokument5 SeitenEjercicios Equilibrio Redox 2Leo LoyolaNoch keine Bewertungen
- Meteorizacion y SuelosDokument4 SeitenMeteorizacion y SuelosLuis ReyesNoch keine Bewertungen
- Parcial Física de CamposDokument1 SeiteParcial Física de CamposCarlos TinocoNoch keine Bewertungen
- 7 Unidad VII. QMA-103Dokument10 Seiten7 Unidad VII. QMA-103Omar SantosNoch keine Bewertungen
- Taller Reflexión de La LuzDokument2 SeitenTaller Reflexión de La LuzLuz Adriana Quitumbo SantaNoch keine Bewertungen
- Plan de Evaluación 1er Lapso 2020-2021 Quimica 4to AñoDokument3 SeitenPlan de Evaluación 1er Lapso 2020-2021 Quimica 4to AñoJosecarlo ParadaNoch keine Bewertungen
- Optimizacion y Funcionamiento Eficiente Del Arrancador de Motor y Generador de Energia para La Bater 202312120119555whwDokument17 SeitenOptimizacion y Funcionamiento Eficiente Del Arrancador de Motor y Generador de Energia para La Bater 202312120119555whwdavid.caceres.mamani.333Noch keine Bewertungen
- Sólidos Metálicos El Enlace Metálico PDFDokument24 SeitenSólidos Metálicos El Enlace Metálico PDFChikito MazamorreroNoch keine Bewertungen
- Analisis GranulometricoDokument5 SeitenAnalisis Granulometricoramon burgos ballesterosNoch keine Bewertungen
- Practica 1. NitratosDokument3 SeitenPractica 1. Nitratosskt1310Noch keine Bewertungen
- Examen de Entrada 2020a - AlumnosDokument7 SeitenExamen de Entrada 2020a - AlumnosMiguel BenitesNoch keine Bewertungen