Das könnte Ihnen auch gefallen
- Lecture - 11 Robust State Feedback StabilizationDokument30 SeitenLecture - 11 Robust State Feedback StabilizationakozyNoch keine Bewertungen
- Lecture - 07 Stability of Feedback SystemsDokument31 SeitenLecture - 07 Stability of Feedback SystemsakozyNoch keine Bewertungen
- Objectives: Experiment No. 2 Driving Stepper MotorDokument6 SeitenObjectives: Experiment No. 2 Driving Stepper MotorakozyNoch keine Bewertungen
- Lecture - 12 Nonlinear Observers and Output Feedback StabilizationDokument30 SeitenLecture - 12 Nonlinear Observers and Output Feedback StabilizationakozyNoch keine Bewertungen
- Lecture - 03 Stability of Equilibrium PointsDokument35 SeitenLecture - 03 Stability of Equilibrium PointsakozyNoch keine Bewertungen
- Lecture - 07 Stability of Feedback SystemsDokument31 SeitenLecture - 07 Stability of Feedback SystemsakozyNoch keine Bewertungen
- Jitter - An Introduction: WhitepaperDokument7 SeitenJitter - An Introduction: WhitepaperJalaj JainNoch keine Bewertungen
- Lecture - 13 Output Feedback StabilizationDokument33 SeitenLecture - 13 Output Feedback StabilizationakozyNoch keine Bewertungen
- Controller Selection PDFDokument45 SeitenController Selection PDFakozyNoch keine Bewertungen
- Exp3 Stepper Motor ControlDokument5 SeitenExp3 Stepper Motor ControlakozyNoch keine Bewertungen
- Lecture - 14 Tracking & RegulationDokument31 SeitenLecture - 14 Tracking & RegulationakozyNoch keine Bewertungen
- Exp1 Switching PrincipleDokument5 SeitenExp1 Switching PrincipleakozyNoch keine Bewertungen
- Digital Sensors: Dr. Ashraf SaleemDokument11 SeitenDigital Sensors: Dr. Ashraf SaleemakozyNoch keine Bewertungen
- Simple Cooperative Scheduler For ArduinoDokument9 SeitenSimple Cooperative Scheduler For ArduinoakozyNoch keine Bewertungen
- Sine Wave GeneratorDokument12 SeitenSine Wave GeneratortranvandoanhNoch keine Bewertungen
- DC Motor Speed ControlDokument5 SeitenDC Motor Speed ControlAnita WulansariNoch keine Bewertungen
- Intro To InferenceDokument40 SeitenIntro To InferenceakozyNoch keine Bewertungen
- Tutorial On Monte Carlo Sampling PDFDokument16 SeitenTutorial On Monte Carlo Sampling PDFakozyNoch keine Bewertungen
- Nonlinear Control Lecture # 2 Stability of Equilibrium PointsDokument36 SeitenNonlinear Control Lecture # 2 Stability of Equilibrium PointsFawaz PartoNoch keine Bewertungen
- Dynamic Bayesian Networks - Representation, Inference and LearningDokument225 SeitenDynamic Bayesian Networks - Representation, Inference and Learningcixn62Noch keine Bewertungen
- Controller SelectionDokument45 SeitenController SelectionakozyNoch keine Bewertungen
- NXP LPC1768 & Keil Quadcopter Project Lab Manual PDFDokument99 SeitenNXP LPC1768 & Keil Quadcopter Project Lab Manual PDFakozyNoch keine Bewertungen
- Analog Sensors PDFDokument110 SeitenAnalog Sensors PDFakozyNoch keine Bewertungen
- Mechatronics System Design: Actuators SelectionDokument5 SeitenMechatronics System Design: Actuators SelectionskylabmNoch keine Bewertungen
- Lect - 3 Two-Dimensional SystemsDokument17 SeitenLect - 3 Two-Dimensional SystemsakozyNoch keine Bewertungen
- Advanced RoboticsDokument381 SeitenAdvanced RoboticsakozyNoch keine Bewertungen
- Lect 1 IntroDokument22 SeitenLect 1 IntroakozyNoch keine Bewertungen
- Lecture - 01 Introduction & Two-Dimensional SystemsDokument35 SeitenLecture - 01 Introduction & Two-Dimensional SystemsakozyNoch keine Bewertungen
- Microcomputer Implementation of Digital ControlDokument21 SeitenMicrocomputer Implementation of Digital ControlakozyNoch keine Bewertungen
- Advanced RoboticsDokument381 SeitenAdvanced RoboticsakozyNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- West Point Partners Project - OverviewDokument11 SeitenWest Point Partners Project - OverviewhudsonvalleyreporterNoch keine Bewertungen
- Quick Operation Guide of DS-7200-ST DVR (V1.2.0)Dokument40 SeitenQuick Operation Guide of DS-7200-ST DVR (V1.2.0)Roman MayurNoch keine Bewertungen
- GCCE RaptorDokument4 SeitenGCCE RaptorSayidina PanjaitanNoch keine Bewertungen
- Aiwa MC CSD-A120, A140 PDFDokument35 SeitenAiwa MC CSD-A120, A140 PDFRodrigo NegrelliNoch keine Bewertungen
- Tabla 1-1 (W Shapes)Dokument17 SeitenTabla 1-1 (W Shapes)Leonardo ZambranoNoch keine Bewertungen
- How To Export Resource Assignment Data To Excel From P6Dokument9 SeitenHow To Export Resource Assignment Data To Excel From P6artletNoch keine Bewertungen
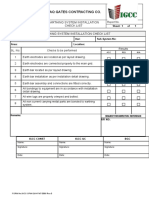
- IGCC-OPM-QUA-FMT-0095 Rev.0 - EARTHING SYSTEM INSTALLATION CHECKSHEETDokument1 SeiteIGCC-OPM-QUA-FMT-0095 Rev.0 - EARTHING SYSTEM INSTALLATION CHECKSHEETAhmedNoch keine Bewertungen
- PLAN UPDATE 2020 r1Dokument101 SeitenPLAN UPDATE 2020 r1David SusantoNoch keine Bewertungen
- Building Materials Reuse and RecycleDokument10 SeitenBuilding Materials Reuse and RecyclemymalvernNoch keine Bewertungen
- Performance Appraisal Form For ManagerDokument12 SeitenPerformance Appraisal Form For Managervandana_dubey15Noch keine Bewertungen
- Classification Essay On FriendsDokument8 SeitenClassification Essay On Friendstycheknbf100% (2)
- Hoja de EspecificacionesDokument2 SeitenHoja de Especificacionesacere18Noch keine Bewertungen
- Alternator LSA42.3j enDokument12 SeitenAlternator LSA42.3j enArdi Wiranata PermadiNoch keine Bewertungen
- Installation, Operation, and Maintenance Manual: Ansi Process PumpDokument56 SeitenInstallation, Operation, and Maintenance Manual: Ansi Process Pumpfaundes100% (1)
- 7-67-0012 Rev 3 Short Sliding Support On ExistingDokument1 Seite7-67-0012 Rev 3 Short Sliding Support On Existingprince jaswalNoch keine Bewertungen
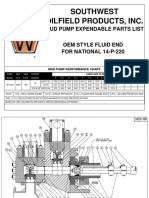
- Oem National 14-P-220 7500psiDokument9 SeitenOem National 14-P-220 7500psiandrew0% (1)
- Marina Bay SandsDokument5 SeitenMarina Bay SandsTauqeer A. BalochNoch keine Bewertungen
- Welding Machine Project Report FinalDokument44 SeitenWelding Machine Project Report FinalJAYAPRABHAKARAN N NNoch keine Bewertungen
- Project Based Learning Is A Student Centered Pedagogy ThatDokument3 SeitenProject Based Learning Is A Student Centered Pedagogy ThatPayel DaluiNoch keine Bewertungen
- Method Statement of Refrigran Pipe Insulation and Cladding InstallationDokument16 SeitenMethod Statement of Refrigran Pipe Insulation and Cladding InstallationOdot Al GivaryNoch keine Bewertungen
- Ballastless TracksDokument20 SeitenBallastless TracksYacoub Cheikh67% (3)
- 8.4.2 Detecting The Presence/Absence of Paper: Pickup RollerDokument2 Seiten8.4.2 Detecting The Presence/Absence of Paper: Pickup RollerHERL NEIL BilbaoNoch keine Bewertungen
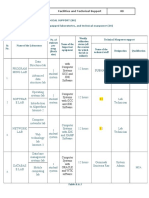
- Criterion 6 Facilities and Technical Support 80: With Computer Systems GCC and JDK SoftwareDokument6 SeitenCriterion 6 Facilities and Technical Support 80: With Computer Systems GCC and JDK SoftwareVinaya Babu MNoch keine Bewertungen
- Aniuk SpecimenDokument10 SeitenAniuk SpecimenMario ParraNoch keine Bewertungen
- On Phase ChangesDokument28 SeitenOn Phase Changesapi-313517608Noch keine Bewertungen
- Xiaopan OS InstallationDokument6 SeitenXiaopan OS InstallationMuhammad SyafiqNoch keine Bewertungen
- PDFDokument2 SeitenPDFSalim AshorNoch keine Bewertungen
- Motor Driver Board Tb6560-5axisDokument14 SeitenMotor Driver Board Tb6560-5axisAli Asghar MuzzaffarNoch keine Bewertungen