International Journal of EmergingTrends & Technology in Computer Science(IJETTCS)
Web Site: www.ijettcs.org Email: editor@ijettcs.org, editorijettcs@gmail.com
Volume 3, Issue 2, March April 2014 ISSN 2278-6856
Volume 3, Issue 2 March April 2014 Page 233
Abstract: Measurement of velocity has been a challenging
task in the surface water studies. Several attempts to measure
the turbulences with contact sensors could not yield accurate
results as they alter the flow pattern. This paper aims at the
implementation of the noncontact velocity measurement
system based on video processing. The movement of flow is
estimated from the pair of consecutive frames from which
displacement is calculated through the pattern matching
technique. Image based method uses cross-correlation as the
similarity index, which is calculated for patterns enclosed in
a ROI. The results shown in the paper are calculated using
CMOS camera on the Bombay airport model at CWPRS.
Keywords: LSPIV; PIV; Ortho-rectification; Segmentation;
Cross-correlation.
1. INTRODUCTION
Central Water and Power Research Station (CWPRS), a
premier research institute has been working in the area of
water resources since 1916. During the recent years
physical model studies have been proven very efficient
and successful as math models are limited with boundary
conditions. The success of previous models is mainly due
to the advent and implementation of new measurement
and processing techniques. One such requirement is to
measure the velocity of the flow occurring in the physical
model area. This paper aims at the proposed systems to
measure velocity in one of the physical hydraulic models
of CWPRS. The output of the study will be more precise
than the existing measurement systems which use contact
type sensors. The area of study is selected such a way that
is in the confluence of the Arabian Sea and the five major
rivers joining the oceans. It is also expected this zone
encounters turbulence [1].
For determining the river dynamics, the flow velocity is
the most primary parameter. Earlier, the velocity
measurements have relied on mechanical velocimeters,
but there was the disadvantage of mechanical wear. In
1980s, the acoustic, radar and image based velocity
measurement method came into existence and are widely
used now-a-days because of its efficiency, performance
and safety. But these systems are costly and minimum of
8 sensors are required to monitor a 100m
2
area. So there
is a new demand for the measurement of surface water
parameters using the instrument that is less intrusive, can
measure those resources more accurately and at lesser
cost. The non-contact sensor can be used widely to avoid
mechanical wear due to contact speed measurement and
can give the accurate measurement too [1].
Image based technique is an emerging and new
measurement technique that is changing the way of
measuring surface water resources. In this method seeded
flows are illuminated of which instantaneous frames are
recorded. These frames are analyzed, from which entire
flow fields are determined. This is a big advantage
compared to the traditional point measurements. This
method is fast, automated and computerized. This method
has no moving parts, requires fewer calibrations and it is
less intrusive. It instantaneously measures velocities in a
flow plane. Image velocimetry is more user friendly
because of the use of video, instead of transducer output
such as signals [1, 2].The studies conducted states that
this method is able to provide hydraulically sound and
economically viable solutions to various problems
associated with projects on water resources, energy and
water-born transport including coastal and harbor
engineering.
1.1 Basic Principle
The movement of tracers present in the flow and follow
the flow is used to estimate the velocity [1, 4]. The
velocity definition as given in Eq. 1 is used to calculate
the velocity vectors:
(1)
Where, s is a scale factor, t is the time step, and X is the
tracer displacement between two successive observations.
Figure 1 shows the basic schematic diagram of the image
based system.
Figure 1 Schematic Diagram of LSPIV [1]
Video Processing Based Water Surface Velocity
Measurement Using Spatial Cross Correlation
Technique
Nitika Sharma
1
, Selva Balan
2
, A. A. Naik
3
1
Electronics and Telecomm. Engineering Dept.,Maharashtra Institute of Technology,Pune, India
2
Instrumentation and Control Dept.,Central Water and Power Research Station,Pune, India
3
Electronics and Telecomm. Engineering Dept.,Maharashtra Institute of Technology,Pune, India
International Journal of EmergingTrends & Technology in Computer Science(IJETTCS)
Web Site: www.ijettcs.org Email: editor@ijettcs.org, editorijettcs@gmail.com
Volume 3, Issue 2, March April 2014 ISSN 2278-6856
Volume 3, Issue 2 March April 2014 Page 234
2. VELOCITY MEASUREMENT SYSTEM
COMPONENTS
2.1 Light Source:
For obtaining the high quality data, illumination
component is the most crucial. For the outdoor setup the
light source can be natural light, but if it is an indoor
experimental setup then strong illumination is required.
So Halogen and sodium-vapor lamp are used. These are
to be positioned in order to have uniform illumination of
the area and to avoid light reflection on the surface. To
obtain the homogenous light intensity distribution over
the entire area, the spots must be placed around or on top
of the camera [1, 3], [11].
2.2 Tracer Particles:
For measurement, determining the tracer particle is very
important. The tracer particles must be small enough to
track accurately the flow but large enough to scatter
sufficient light for imaging .Tracer particles should be
lighter than the density of water and should also follow
with the velocity of water. The tracers need to be cheap,
and environmentally acceptable. The particle size, density
composition, and concentration are important factors
when selecting tracer for s [1], [3], [6], [11].
The tendency of flow of tracer particle with the water
flow is the relation time, p , defined as the time required
for a particle at rest to be accelerated within about 63%
of the fluid velocity, which can be estimated using
equation 2 [1], [3]:
(2)
Where,
p
and d
p
are the density and the diameter of the
particle, and v are the fluid density and kinematic
viscosity, respectively.
2.3 Image Recorder:
The video frames of tracer particles in imaging area are
recorded using a high speed digital camera. CMOS image
sensor is used widely because the function, size, price,
and power dissipation are all better than CCD image
sensor and also the performance parameter is close to
CCD camera. To reduce time interval of two frames, it is
necessary to use high frame rate image sensor in order to
get real time measurement. The improvement in
resolution ratio and sample no. in correlate operation can
be done by using high pixel image sensor [1], [5].
3. PROCESSING OF VIDEO IMAGES:
The general block diagram for the LSPIV system is given
in figure 2.
Figure 2 General Block Diagram of LSPIV System [1]
The method involves image processing which evaluates
the velocity field.
3.1 Preprocessing
From the recorded video, frames are extracted and each
frame is processed in order to prepare for further PIV
evaluation. The frames of the video are in distorted form
which has to be transformed into the undistorted
appearance according to the block diagram given in
figure 3.
Figure 3 Block Diagram of Preprocesing
3.1.1 Ortho-rectification
For the large area application, images are taken from
oblique angle which does not give the accurate result. So
the frames acquired from the video have to be rectified
such that the frames are acquired from top of the imaging
area. For accurate result orthographic projection is needed
[1], [6].
Generally, a Direct Linear Transformation (DLT) is
applied to produce ortho-images i.e. the relationship
between 3-D real world coordinate (X, Y, and Z) and the
2-D image coordinate (x and y), as shown in Figure 4.
The mapping relationships between the two systems are
given in Eq. 3 and Eq. 4 [6], [10]:
(3)
(4)
where, A
1
to A
4
, B
1
to B
4
and C
1
to C
3
are the mapping
Coefficients which can be determined by the least square
method using the known 3-D coordinates. For
transformation minimum six 3-D coordinates are needed.
The 3-D coordinate point is generally what can be easily
accessible out in the field e.g., trees, power line poles,
building corners, etc. Before accessing the above
equation, the effect of radial lens distortion has to be
corrected from the image such that the size of undistorted
Ortho-
rectification
Background
Uniformization
Basic
Segmentation
International Journal of EmergingTrends & Technology in Computer Science(IJETTCS)
Web Site: www.ijettcs.org Email: editor@ijettcs.org, editorijettcs@gmail.com
Volume 3, Issue 2, March April 2014 ISSN 2278-6856
Volume 3, Issue 2 March April 2014 Page 235
image as well as the original image should be of same
size [1], [6].
After we get ortho-photo, the following steps are carried
out for the preprocessing [7]:
Conversion of RGB video frame into the gray
scale.
The raw image contains the Region of interest
(ROI) to be analyzed and also the region
surrounding the ROI which is of no use for
analysis. This region of no use is masked to
increase the computational efficiency and
processing accuracy.
To enhance particle detection, brightness/ contrast
level is adjusted.
To give uniform illumination in frames subtraction
of a averaged background image is done.
To trace the particles, all the particles less than 50
pixels are filtered.
3.2 Processing
Some sort of interrogation scheme is needed for the
measurement of velocity. The evaluation of video frame is
done using particle matching technique i.e. correlation
technique, which is performed on the gray level particles
present on frames.
Cross-correlation is a double frame single exposure
method whose basic concept is to individuate each
corresponding particle pattern in image pair by
calculating the cross-correlation coefficient. In cross-
correlation the direction of flow can be easily found i.e.
there is no directional ambiguity and displacement can be
calculated with more accuracy. The cross-correlation can
be discretely represented as given Eq. 5 [1], [3], [6], [7]:
(5)
Where, M
i
and M
j
are the respective sizes of the
interrogation areas in pixels. A
ij
and B
ij
are the respective
distributions of grey-scale intensity in the two images. A
ij
and B
ij
are the mean intensities in that interrogation area,
used to normalize the intensities.
The image based method uses cross-correlation as the
similarity index, which is calculated for patterns enclosed
in a small interrogation area (IA) which is equal to ROI
in the first frame and for the same sized window in larger
searching area in the second frame. The window pair
having the maximum cross-correlation value is the
patterns most probable displacement between two
consecutive frames [4]. When the displacement is
obtained, velocity can be calculated by dividing it with the
time difference between two consecutive frames. The size
of interrogation area can be considered such that it
contains at least 6 particles per window on an average.
The whole concept of image processing is shown in figure
4 [1].
Figure 4 Concept of image processing [1]
3.3 Post Processing
3.3.1 Calibration
After the processing all results are in the unit of pixel and
frames, which has no use in real world. So to convert it in
meter per second calibration has to be done.The
calibration of the time is easily done by taking the time
difference between two frames. This time difference
however is not constant for all images. So, the average
time difference of all frames in the series is calculated
and the whole series is used. For the calibration of the
distance, a reference with known distance has to be
present in the photos. This distance on the photo in pixels
can be related then to a real distance as given in Eq. 6 [1],
[8]:
(6)
3.3.2 Vector Validation and interpolation
Sometimes due to the uneven illumination of tracer
particles and many other factors lead to the noise in the
frame, which results in invalid velocity vector. Therefore,
it is necessary to remove the error vector manually. This
makes the wrong location as a blank vector. So, the point
on the blank flow is interpolated [7].
4. IMPLEMENTATION AND RESULTS
The video was taken at Bombay airport model at CWPRS,
Pune. The 8 megapixel camera with 1280x720 resolution
and 24 bits per pixel was used. The video of about 3.1360
secs at 29 frames per sec was filmed. The computation
time is about seconds with an intel dual core processor.
As the tracer particles, additional paper particles were
introduced on the flow. The sequence of accessing the
frames is 1-2, 2-3, 3-4 and so on.
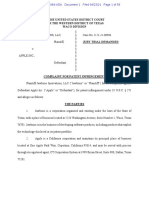
The preprocessed image of video frames is given in figure
6 (a) Shows the original frame, (b) Gray scale frame, (c)
shows the background uniform frame and (d) shows the
preprocessed image.
International Journal of EmergingTrends & Technology in Computer Science(IJETTCS)
Web Site: www.ijettcs.org Email: editor@ijettcs.org, editorijettcs@gmail.com
Volume 3, Issue 2, March April 2014 ISSN 2278-6856
Volume 3, Issue 2 March April 2014 Page 236
Figure 6 (a) Original Frame, (b) Gray scale image, (c)
Uniform Background frame, (d) Preprocessed Frame
The interrogation area is selected as 64 pixels with the
step of 32 pixels i.e 50 percent of overlapping. The figure
7 (a) shows the velocity vectors in the 31
st
frame of the
video and 8(b) shows the frame after vector validation
and interpolation is applied. Figure 9 shows the scatter
plot of the velocity in (u,v) i.e horizontal and vertical
direction respectively.
The velocity in pixel/frame is calculated as u = -
2.7366px/fr and v =4.0422 px/fr.
(a)
(b)
Figure 7 (a) Velocity vectors of frame, (b) Frame after
vector validation and interpolation
5. CONCLUSION
The calculation of the surface water velocity using the
image based technique is a reliable, accurate and
instantaneous measurement approach. The main
application of the method is in the case of extreme flood
and during slow and shallows flows. This method require
less efforts to obtain data as compared to the point based
and profiling instruments.
The preprocessing is applied to each frame of the video to
suppress the bed effect and highlight the tracers particles.
Then on these preprocessed frames pattern matching
technique is applied as the processing to calculate the
displacement. Then the calibration is done to get the
velocity in the meter per seconds and also the vector
validation and interpolation is done. The results are found
accurately using the given system.
References
[1] M. Selva Balan, Nitika Sharma, Shashank Kumbhar,
Ganesh Deshpande, Chirag Kankariya and A.A.Naik,
Surface Water Velocity Measurement Using Video
Processing : A Survey,International Conference on
Electronics and Communication Systems, 2014.
[2] Marian Muste, Won Kim and J anice M. Fulford,
Developments in hydrometric technology: new and
emerging instruments for mapping river hydrodynamics
,bulletin World Meteorological Organization, J uly 2008.
[3] Cristiana Di Cristo, Particle Imaging Velocimetry and Its
Applications in Hydraulics: A State-of-the-Art Review, P.
Rowinski (ed.), Experimental Methods in Hydraulic
Research, Geoplanet: Earth and Planetary Sciences, DOI
10.1007/978-3-642-17475-9_3, Springer-Verlag Berlin
Heidelberg 2011.
[4] Pengtago Wang, Bin Li, Guohui Yu and Dongpo Sun,
Analysis and Processing of the River Model Test Velocity
Data Based on Digital Particle Image Velocimetry, 3
rd
International congress on Image and Signal Processing,
2010..
[5] Zhang Yu-xin, Xu Zheng-ping, Liu Yu, Ge Wen-qi, A
Real-time Two-dimensional Correlation Speed
Measurement Based on Image, International Conference
on Computer, Mechatronics, Control and Electronic
Engineering (CMCE),2010.
[6] M. Muste, I. Fujita, A. Hauet, Large-scale particle image
velocimetry for measurements in riverine environments,
Water resources research, vol. 44 2008.
[7] Shazia manzoor, Azam Islam, Imran Rafiq
Chughtaiand Manssor Hameed Inayat, Low Cost
indigenous Particle Imaging Velocimetry, 10
th
International Bhurban conference on Applied Sciences and
Technology(IBCAST), Islamabad, Pakistan, 15
th
19
th
J anuary, 2013.
[8] Tom Vanden Berghe, Image processing for a LSPIV
application on a river, Thesis presented at Faculteit
Ingenieurswetenschappen en Architectuur, Academiejaar
2012-2013.
[9] M. Muste, H-C Ho, D. Kim, Considerations on direct
streamflow measurements using video imagery: Outlook
and research needs, J ournal of Hydro-environment
Research 5, 2011.
[10] Quan Liu Hang Su, Correction of the Asymmetrical
Circular Projection in DLT Camera Calibration, 2008
Congress on Image and Signal Processing.
[11] Sameh A. kantoush, Anton J . Schleiss, Tetsuya Sumi,
Mitsuhiro Murasaki, LSPIV Implementation for
Environmental Flow in Laboratory and Field Cases,
J ournal of Hydro-environment Reasearch, 2011.
(a) (b)
(c) (d)
Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Seismic Data Processing (Part I)Dokument39 SeitenSeismic Data Processing (Part I)Rahmaan P AlamNoch keine Bewertungen
- Detection of Malicious Web Contents Using Machine and Deep Learning ApproachesDokument6 SeitenDetection of Malicious Web Contents Using Machine and Deep Learning ApproachesInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- Analysis of Product Reliability Using Failure Mode Effect Critical Analysis (FMECA) - Case StudyDokument6 SeitenAnalysis of Product Reliability Using Failure Mode Effect Critical Analysis (FMECA) - Case StudyInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- THE TOPOLOGICAL INDICES AND PHYSICAL PROPERTIES OF n-HEPTANE ISOMERSDokument7 SeitenTHE TOPOLOGICAL INDICES AND PHYSICAL PROPERTIES OF n-HEPTANE ISOMERSInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- Study of Customer Experience and Uses of Uber Cab Services in MumbaiDokument12 SeitenStudy of Customer Experience and Uses of Uber Cab Services in MumbaiInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- Soil Stabilization of Road by Using Spent WashDokument7 SeitenSoil Stabilization of Road by Using Spent WashInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- An Importance and Advancement of QSAR Parameters in Modern Drug Design: A ReviewDokument9 SeitenAn Importance and Advancement of QSAR Parameters in Modern Drug Design: A ReviewInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- The Mexican Innovation System: A System's Dynamics PerspectiveDokument12 SeitenThe Mexican Innovation System: A System's Dynamics PerspectiveInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- Impact of Covid-19 On Employment Opportunities For Fresh Graduates in Hospitality &tourism IndustryDokument8 SeitenImpact of Covid-19 On Employment Opportunities For Fresh Graduates in Hospitality &tourism IndustryInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- Design and Detection of Fruits and Vegetable Spoiled Detetction SystemDokument8 SeitenDesign and Detection of Fruits and Vegetable Spoiled Detetction SystemInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- A Comparative Analysis of Two Biggest Upi Paymentapps: Bhim and Google Pay (Tez)Dokument10 SeitenA Comparative Analysis of Two Biggest Upi Paymentapps: Bhim and Google Pay (Tez)International Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- Staycation As A Marketing Tool For Survival Post Covid-19 in Five Star Hotels in Pune CityDokument10 SeitenStaycation As A Marketing Tool For Survival Post Covid-19 in Five Star Hotels in Pune CityInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- Performance of Short Transmission Line Using Mathematical MethodDokument8 SeitenPerformance of Short Transmission Line Using Mathematical MethodInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- Synthetic Datasets For Myocardial Infarction Based On Actual DatasetsDokument9 SeitenSynthetic Datasets For Myocardial Infarction Based On Actual DatasetsInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- A Deep Learning Based Assistant For The Visually ImpairedDokument11 SeitenA Deep Learning Based Assistant For The Visually ImpairedInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- Anchoring of Inflation Expectations and Monetary Policy Transparency in IndiaDokument9 SeitenAnchoring of Inflation Expectations and Monetary Policy Transparency in IndiaInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- Design and Manufacturing of 6V 120ah Battery Container Mould For Train Lighting ApplicationDokument13 SeitenDesign and Manufacturing of 6V 120ah Battery Container Mould For Train Lighting ApplicationInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- Ijaiem 2021 01 28 6Dokument9 SeitenIjaiem 2021 01 28 6International Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- Swot Analysis of Backwater Tourism With Special Reference To Alappuzha DistrictDokument5 SeitenSwot Analysis of Backwater Tourism With Special Reference To Alappuzha DistrictInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- The Effect of Work Involvement and Work Stress On Employee Performance: A Case Study of Forged Wheel Plant, IndiaDokument5 SeitenThe Effect of Work Involvement and Work Stress On Employee Performance: A Case Study of Forged Wheel Plant, IndiaInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- PTSP - MLRS - R22 - II - I - ECE - SyllabusDokument2 SeitenPTSP - MLRS - R22 - II - I - ECE - Syllabusrupa kumar dhanavathNoch keine Bewertungen
- Unit-5 - Detection of Radar Signals in NoiseDokument39 SeitenUnit-5 - Detection of Radar Signals in NoiseMani PrinceNoch keine Bewertungen
- EEE 3105: Signals and Linear Systems: Cross Correlation FunctionDokument8 SeitenEEE 3105: Signals and Linear Systems: Cross Correlation FunctionMozammel HossainNoch keine Bewertungen
- Unit 4 Random Signal ProcessingDokument39 SeitenUnit 4 Random Signal ProcessingmanojniranjNoch keine Bewertungen
- PTSP Unit4-VrcDokument158 SeitenPTSP Unit4-VrcSonu GoudNoch keine Bewertungen
- Analysis of Water-Level Response To Rainfall and Implications For Recharge Pathways in The Chalk Aquifer, SE EnglandDokument17 SeitenAnalysis of Water-Level Response To Rainfall and Implications For Recharge Pathways in The Chalk Aquifer, SE EnglandGustavo Facincani DouradoNoch keine Bewertungen
- FunctionsDokument31 SeitenFunctionsVili KamenovaNoch keine Bewertungen
- EMERGEDokument38 SeitenEMERGEEeleaNoch keine Bewertungen
- SignalDokument14 SeitenSignalashishNoch keine Bewertungen
- SAMS 2000 User's Manual PDFDokument96 SeitenSAMS 2000 User's Manual PDFdanilo_vergara_11Noch keine Bewertungen
- Waveform Substitution Techniques For Recovering Missing Speech Segments in Packet Voice CommunicationsDokument9 SeitenWaveform Substitution Techniques For Recovering Missing Speech Segments in Packet Voice CommunicationsThuy Dieu NguyenNoch keine Bewertungen
- 4 1 2 Uwb Antenne Simulation With CST Microwave StudioDokument24 Seiten4 1 2 Uwb Antenne Simulation With CST Microwave StudioUmair SaleemNoch keine Bewertungen
- Advanced Signals and Systems Part 1: Introduction: Gerhard SchmidtDokument15 SeitenAdvanced Signals and Systems Part 1: Introduction: Gerhard SchmidtvondutchlgNoch keine Bewertungen
- BSL Lab ManualDokument67 SeitenBSL Lab ManualKranthi Kumar ReddyNoch keine Bewertungen
- Overview of Pre-And Post-Processing of Ambient-Noise CorrelationsDokument44 SeitenOverview of Pre-And Post-Processing of Ambient-Noise CorrelationsJennifer WatsonNoch keine Bewertungen
- Effect of Pseudo Random Noise (PRN) Spreading Sequence Generation of 3GPP Users' Codes On GPS Operation in Mobile HandsetDokument8 SeitenEffect of Pseudo Random Noise (PRN) Spreading Sequence Generation of 3GPP Users' Codes On GPS Operation in Mobile HandsetMuhammad Nuzulul IlhamNoch keine Bewertungen
- Algorithms For Cattle Diseases Detecting at Early Stages and For Diagnosis & Recommendations MakingDokument12 SeitenAlgorithms For Cattle Diseases Detecting at Early Stages and For Diagnosis & Recommendations MakingФедор ВладимировNoch keine Bewertungen
- QAB 4083 Seismic Data Processing: Lecture 7c: Wiener Filter For Spiking DeconvolutionDokument27 SeitenQAB 4083 Seismic Data Processing: Lecture 7c: Wiener Filter For Spiking DeconvolutionMithunNoch keine Bewertungen
- Communicatin System 1 Lab Manual 2011Dokument63 SeitenCommunicatin System 1 Lab Manual 2011Sreeraheem SkNoch keine Bewertungen
- SRDS Lecture 4 Basics of Random VibrationDokument45 SeitenSRDS Lecture 4 Basics of Random Vibrationprraaddeej chatelNoch keine Bewertungen
- DSP Lab Manual 2021 22Dokument66 SeitenDSP Lab Manual 2021 22Ahmed AleesaNoch keine Bewertungen
- Jawbone Innovations v. AppleDokument58 SeitenJawbone Innovations v. AppleMikey CampbellNoch keine Bewertungen
- Digisign Ref 1Dokument10 SeitenDigisign Ref 1Tulasi RadhikaNoch keine Bewertungen
- RVSPDokument8 SeitenRVSPeshwar_world0% (1)
- The Generalized Correlation Method For Estimation of Time Delay-3c4Dokument8 SeitenThe Generalized Correlation Method For Estimation of Time Delay-3c4Abin BabyNoch keine Bewertungen
- Digital Signal Processing Lab: Discrete Time Systems: DownsamplingDokument9 SeitenDigital Signal Processing Lab: Discrete Time Systems: DownsamplingMian Safyan KhanNoch keine Bewertungen
- D R S SR R T: Cross-Correlation Function, Is Defined by The IntegralDokument13 SeitenD R S SR R T: Cross-Correlation Function, Is Defined by The IntegralSulaiman m SaeedNoch keine Bewertungen
- OpenPIV - Open Source Particle Image Velocimetry, Python VersionDokument19 SeitenOpenPIV - Open Source Particle Image Velocimetry, Python Versionalex.liberzon2984Noch keine Bewertungen
- Analytical Model of An Ultrasonic Cross-Correlation Flow Meter, Part 1 - ..Dokument7 SeitenAnalytical Model of An Ultrasonic Cross-Correlation Flow Meter, Part 1 - ..Thiago TavaresNoch keine Bewertungen