Das könnte Ihnen auch gefallen
- Anderson Bridge ExperimentDokument5 SeitenAnderson Bridge Experimentsachin singh NegiNoch keine Bewertungen
- Analysis of The SEPIC Converter PDFDokument8 SeitenAnalysis of The SEPIC Converter PDFHilmy AwadNoch keine Bewertungen
- SEPIC Analysis Team 2 PDFDokument8 SeitenSEPIC Analysis Team 2 PDFStirley Madrid VelezNoch keine Bewertungen
- SEPIC Analysis Team 2 PDFDokument8 SeitenSEPIC Analysis Team 2 PDFjunior mauricio lojaNoch keine Bewertungen
- Sepic ConverterDokument8 SeitenSepic Converterp190367 Hafiz Mudassir Ali ShahNoch keine Bewertungen
- 8channel IrDokument4 Seiten8channel IrPardeep KumarNoch keine Bewertungen
- Power Electronics-3rd ChapterDokument80 SeitenPower Electronics-3rd ChapterPasupuleti SivakumarNoch keine Bewertungen
- Problem30 77Dokument1 SeiteProblem30 77IENCSNoch keine Bewertungen
- IJCRT1704175Dokument8 SeitenIJCRT1704175MR. VYSHNAV V SNoch keine Bewertungen
- For GioDokument7 SeitenFor GiokeimasterNoch keine Bewertungen
- Boundary ConditionsDokument2 SeitenBoundary ConditionsNagai KumaresanNoch keine Bewertungen
- Mock Gate - 1 Ec: Group - A (One Mark Questions) 01. (D)Dokument12 SeitenMock Gate - 1 Ec: Group - A (One Mark Questions) 01. (D)adithyagamesNoch keine Bewertungen
- Second Order Circuits PDFDokument25 SeitenSecond Order Circuits PDFShreshth SrivastavaNoch keine Bewertungen
- Inverse Kinematics Solutions - Lec - 5Dokument47 SeitenInverse Kinematics Solutions - Lec - 5NEELIMANoch keine Bewertungen
- Fato de Forma - ConduçãoDokument2 SeitenFato de Forma - ConduçãoSamantha YágaraNoch keine Bewertungen
- Factor de FormaDokument2 SeitenFactor de FormaAlfonso RamirezNoch keine Bewertungen
- Control SystemsDokument39 SeitenControl SystemsKrushnasamy SuramaniyanNoch keine Bewertungen
- Ejercicio AnalogicosDokument4 SeitenEjercicio AnalogicosMAIDY JULIETH SANCHEZ CUELLARNoch keine Bewertungen
- NNB Lect6 Transmission LineDokument33 SeitenNNB Lect6 Transmission LinePhuc NguyenNoch keine Bewertungen
- Lecture 12: Natural Frequencies: Lecturer: Dr. Vinita Vasudevan Scribe: Shashank ShekharDokument3 SeitenLecture 12: Natural Frequencies: Lecturer: Dr. Vinita Vasudevan Scribe: Shashank ShekharAniruddha RoyNoch keine Bewertungen
- Source-Free Parallel RLC CircuitDokument14 SeitenSource-Free Parallel RLC CircuitjillkillNoch keine Bewertungen
- Tarea Sección CircularDokument3 SeitenTarea Sección CircularDanny Miguel Andrade NajasNoch keine Bewertungen
- M1 Unit-2Dokument32 SeitenM1 Unit-2S AdilakshmiNoch keine Bewertungen
- Tugas Fisik LanjutDokument7 SeitenTugas Fisik LanjutAdya PradiptaNoch keine Bewertungen
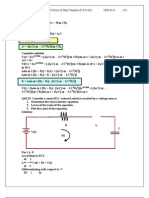
- Ifv (T) V Sin (T) A Sin, Derive The Expressions For A andDokument12 SeitenIfv (T) V Sin (T) A Sin, Derive The Expressions For A andWESTLY JUCONoch keine Bewertungen
- Working With Combinational LogicDokument62 SeitenWorking With Combinational Logic박대민Noch keine Bewertungen
- Chapter 8. The Steady Magnetic Field: 1. Biot-Savart LawDokument54 SeitenChapter 8. The Steady Magnetic Field: 1. Biot-Savart LawkailasNoch keine Bewertungen
- PST Unit 2Dokument12 SeitenPST Unit 2Karthick Sivakumar ChellamuthuNoch keine Bewertungen
- Software ModelDokument25 SeitenSoftware Modelalomarianas52Noch keine Bewertungen
- HUMMELDokument11 SeitenHUMMELRaul MGNoch keine Bewertungen
- D 4 Development of Beam EquationsDokument1 SeiteD 4 Development of Beam EquationsAHMED SHAKERNoch keine Bewertungen
- Sr. Grand Test Key and HintsDokument7 SeitenSr. Grand Test Key and HintsM JEEVARATHNAM NAIDUNoch keine Bewertungen
- Lec 13 Demodulation of FM AMDokument22 SeitenLec 13 Demodulation of FM AMUmer EhsanNoch keine Bewertungen
- Digital Experiment File With LogisimDokument4 SeitenDigital Experiment File With LogisimNandini SeerviNoch keine Bewertungen
- Modeling of Dynamic Systems: 3.1 Equations of Electric NetworksDokument15 SeitenModeling of Dynamic Systems: 3.1 Equations of Electric NetworksHarry KuoNoch keine Bewertungen
- Analysis of D Converter: K. K. Phanisri KruthiventiDokument6 SeitenAnalysis of D Converter: K. K. Phanisri KruthiventiTJPRC PublicationsNoch keine Bewertungen
- Formular 154Dokument1 SeiteFormular 154พิมพ์ โพธิสัตว์Noch keine Bewertungen
- Eeng 455 LectureDokument174 SeitenEeng 455 Lectureezekielmuriithi34Noch keine Bewertungen
- ABCD &hermite Gaussian Beams 2019Dokument37 SeitenABCD &hermite Gaussian Beams 2019Marco ValerdiNoch keine Bewertungen
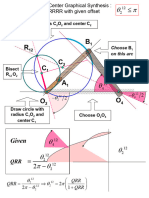
- Dead Center Synthesis RRRRDokument2 SeitenDead Center Synthesis RRRRdomagix470Noch keine Bewertungen
- True Value Measured Value Errors: ErrorDokument16 SeitenTrue Value Measured Value Errors: ErrorAyush NarayanNoch keine Bewertungen
- O F F I O F O F I F F O: Chem 64 PS 2 Solutions Problem 4.1. IFDokument3 SeitenO F F I O F O F I F F O: Chem 64 PS 2 Solutions Problem 4.1. IFsara britoNoch keine Bewertungen
- Exercise 2 (B)Dokument4 SeitenExercise 2 (B)Atharva Sheersh PandeyNoch keine Bewertungen
- 4.1 Beam Stiffness DDokument1 Seite4.1 Beam Stiffness DAHMED SHAKERNoch keine Bewertungen
- Strain Gages: Hambatan Kawat Perubahan Hambatan KawatDokument8 SeitenStrain Gages: Hambatan Kawat Perubahan Hambatan KawatOcta RioNoch keine Bewertungen
- Summary of Steady-State Converter Analysis and Design: Appendix ADokument15 SeitenSummary of Steady-State Converter Analysis and Design: Appendix AUlisesNoch keine Bewertungen
- D 6 F 7 G 8 BunimDokument71 SeitenD 6 F 7 G 8 BunimAyman Ihab Saad AwadNoch keine Bewertungen
- Network Analysis by Van Valkenburg Solution CHAP#6Dokument21 SeitenNetwork Analysis by Van Valkenburg Solution CHAP#6Husnain100% (2)
- Problem 5.31: SolutionDokument3 SeitenProblem 5.31: Solutionali ahmedNoch keine Bewertungen
- Partial GDokument50 SeitenPartial GnemaderakeshNoch keine Bewertungen
- Anderson BridgeDokument3 SeitenAnderson BridgePujaChaudhuryNoch keine Bewertungen
- OrificioDokument3 SeitenOrificioHernan HuamanNoch keine Bewertungen
- Diode With An RLC LoadDokument38 SeitenDiode With An RLC LoadFercho Collahuazo VNoch keine Bewertungen
- Solution Manual for The Elements of Polymer Science and EngineeringVon EverandSolution Manual for The Elements of Polymer Science and EngineeringBewertung: 4 von 5 Sternen4/5 (3)