Das könnte Ihnen auch gefallen
- Table of Contents - Computer NetworksDokument3 SeitenTable of Contents - Computer NetworksJit AggNoch keine Bewertungen
- Embedded Software Primer - Ch8Dokument30 SeitenEmbedded Software Primer - Ch8komal purohit50% (2)
- Microsoft 70-462: Real Exam Questions AnswersDokument7 SeitenMicrosoft 70-462: Real Exam Questions AnswersmattdonaldNoch keine Bewertungen
- Numerical Solutions of Differential Equations: Euler's MethodDokument9 SeitenNumerical Solutions of Differential Equations: Euler's MethodVinayaga Murthy GNoch keine Bewertungen
- Homotopy Analysis and Homotopy Pad Two-Dimensional Coupled Burgers' EquationsDokument9 SeitenHomotopy Analysis and Homotopy Pad Two-Dimensional Coupled Burgers' Equationsgorot1Noch keine Bewertungen
- Nsopde BookDokument40 SeitenNsopde BookRahul RoyNoch keine Bewertungen
- Initial Value ThoermDokument61 SeitenInitial Value ThoermTushar DagaNoch keine Bewertungen
- Ordinary Differential EquationDokument13 SeitenOrdinary Differential EquationMich LadycanNoch keine Bewertungen
- Cal211-CC05-GROUP 8Dokument11 SeitenCal211-CC05-GROUP 8danh.tran214Noch keine Bewertungen
- Cse-Iv-Engineering Mathematics - Iv (10mat41) - Notes PDFDokument132 SeitenCse-Iv-Engineering Mathematics - Iv (10mat41) - Notes PDFGautam Dematti100% (1)
- Euler Method PDFDokument20 SeitenEuler Method PDFFauzi AbasNoch keine Bewertungen
- Exercise Set 05Dokument5 SeitenExercise Set 05puss_trNoch keine Bewertungen
- Metoda e EuleritDokument9 SeitenMetoda e EuleritShqiperia TiranaNoch keine Bewertungen
- Chapter 3Dokument25 SeitenChapter 3Rohit GadekarNoch keine Bewertungen
- Shooting MethodDokument7 SeitenShooting MethodKrish Pavan100% (2)
- Unit Singlestep Methods Solving Initial Value Problems: Structure NoDokument24 SeitenUnit Singlestep Methods Solving Initial Value Problems: Structure NoJAGANNATH PRASADNoch keine Bewertungen
- Padios, Mary Chlouie Reyes, Alexander Sevilla, Vincent Villavicencio, Ray JaysonDokument32 SeitenPadios, Mary Chlouie Reyes, Alexander Sevilla, Vincent Villavicencio, Ray JaysonMary Chlouie Justiniani PadiosNoch keine Bewertungen
- DiffEQ Basics NotesbDokument9 SeitenDiffEQ Basics Notesbchristopher_kephart1Noch keine Bewertungen
- Numerical Methods For First ODEsDokument4 SeitenNumerical Methods For First ODEsMoss KazamatsuriNoch keine Bewertungen
- Finite Diff PDFDokument14 SeitenFinite Diff PDFElshan AliyevNoch keine Bewertungen
- Numerical Analysis With Application: Statistics and Informatics Second Stage 2021-2022Dokument26 SeitenNumerical Analysis With Application: Statistics and Informatics Second Stage 2021-2022Rebar QaraxiNoch keine Bewertungen
- Texto Ode Mecanica ComputacionalDokument24 SeitenTexto Ode Mecanica ComputacionaljoaoNoch keine Bewertungen
- Crivelli The Stormer Verlet MethodDokument14 SeitenCrivelli The Stormer Verlet Methodjjj_ddd_pierreNoch keine Bewertungen
- Euler Factsheet1Dokument10 SeitenEuler Factsheet1Into The UniverseNoch keine Bewertungen
- Num Met-MSDokument29 SeitenNum Met-MSitsmohanecomNoch keine Bewertungen
- Euler's Methods (A Family of Runge - Ku9a Methods)Dokument39 SeitenEuler's Methods (A Family of Runge - Ku9a Methods)N180705Noch keine Bewertungen
- MEC 236 - Computer Applications 3Dokument224 SeitenMEC 236 - Computer Applications 3Wafaa AimanNoch keine Bewertungen
- Mate Matic ADokument154 SeitenMate Matic ADarnel Izekial HVNoch keine Bewertungen
- Numerical SDokument58 SeitenNumerical SSrinyanavel ஸ்ரீஞானவேல்Noch keine Bewertungen
- An Introduction To Physically Based ModelingDokument124 SeitenAn Introduction To Physically Based Modelingrubao_poliNoch keine Bewertungen
- Handout Numerical Method ODEDokument36 SeitenHandout Numerical Method ODEMirin GlansonNoch keine Bewertungen
- Chapter 6 (1) ODE - RKDokument31 SeitenChapter 6 (1) ODE - RKMuhammad FirdawsNoch keine Bewertungen
- Optimal ControlDokument142 SeitenOptimal ControlAbhisek DattaNoch keine Bewertungen
- Finite-Difference Methods: Numerical Method ProjectDokument13 SeitenFinite-Difference Methods: Numerical Method ProjectSagar PrajapatiNoch keine Bewertungen
- Sturm-Liouville Eigenvalue ProblemsDokument7 SeitenSturm-Liouville Eigenvalue Problemshammoudeh13Noch keine Bewertungen
- NumericalMethods UofVDokument182 SeitenNumericalMethods UofVsaladsamurai100% (1)
- Coupled 1st Order ODEsDokument28 SeitenCoupled 1st Order ODEsMuhammad Ahtisham AsifNoch keine Bewertungen
- Partial Differential EquationsDokument18 SeitenPartial Differential EquationsJuanParedesCasasNoch keine Bewertungen
- SAMSA Journal Vol 4 Pp61 78 Thankane StysDokument17 SeitenSAMSA Journal Vol 4 Pp61 78 Thankane StysgerritgrootNoch keine Bewertungen
- Ordinary Differential EquationDokument15 SeitenOrdinary Differential EquationAli Asad SahuNoch keine Bewertungen
- Stability Numerical SchemesDokument15 SeitenStability Numerical SchemesMary DelgadoNoch keine Bewertungen
- Numerical Solution To Ordinary Differential EquationsDokument11 SeitenNumerical Solution To Ordinary Differential EquationsLexzyrie Sybelle S. TolarbaNoch keine Bewertungen
- Systems of Linear EccuationsDokument14 SeitenSystems of Linear EccuationsRaulNoch keine Bewertungen
- Persamaan PanasDokument25 SeitenPersamaan PanasImam UziNoch keine Bewertungen
- Numerical Methods IIDokument9 SeitenNumerical Methods IINik HenNoch keine Bewertungen
- Numerical Methods For Second Order Differential EquationDokument15 SeitenNumerical Methods For Second Order Differential Equationfarshan296015Noch keine Bewertungen
- 1 Euler's Method With PythonDokument5 Seiten1 Euler's Method With PythonThierry RodriguesNoch keine Bewertungen
- Euler Method NotesDokument5 SeitenEuler Method NotesAmbreen KhanNoch keine Bewertungen
- Ma203 006 PDFDokument39 SeitenMa203 006 PDFShibani Shankar RayNoch keine Bewertungen
- O DenotesDokument69 SeitenO DenotesMustafa Hikmet Bilgehan UçarNoch keine Bewertungen
- 0 Tlemcen Mio Contrib PDFDokument48 Seiten0 Tlemcen Mio Contrib PDFManvir Singh GillNoch keine Bewertungen
- Euler's Method: X FTX XT XDokument8 SeitenEuler's Method: X FTX XT Xparin advaniNoch keine Bewertungen
- 1 Euler's Method With PythonDokument5 Seiten1 Euler's Method With Pythonsvedanth8Noch keine Bewertungen
- Part IVDokument44 SeitenPart IVfouzia1Noch keine Bewertungen
- MATH2114 Numerical LN2Dokument24 SeitenMATH2114 Numerical LN2was122333gmail.comNoch keine Bewertungen
- Revised Notes Fall 2017-2018 Mathematical Methods of Engineering Lecture Note 8 Ordinary Differential EquationsDokument11 SeitenRevised Notes Fall 2017-2018 Mathematical Methods of Engineering Lecture Note 8 Ordinary Differential EquationsFred H HalderNoch keine Bewertungen
- X F DX Dy: Chapter 3: Numerical Methods For Ordinary Differential Equations Euler'S MethodDokument4 SeitenX F DX Dy: Chapter 3: Numerical Methods For Ordinary Differential Equations Euler'S Methodems2427Noch keine Bewertungen
- DMS Text BookDokument62 SeitenDMS Text BookPradyot SNNoch keine Bewertungen
- Math 230 Section BE1/BB1 Introduction To Differential EquationsDokument5 SeitenMath 230 Section BE1/BB1 Introduction To Differential Equationsmaths203Noch keine Bewertungen
- Elementary Differential Equations with Linear AlgebraVon EverandElementary Differential Equations with Linear AlgebraNoch keine Bewertungen
- Ordinary Differential Equations and Stability Theory: An IntroductionVon EverandOrdinary Differential Equations and Stability Theory: An IntroductionNoch keine Bewertungen
- An Introduction to Linear Algebra and TensorsVon EverandAn Introduction to Linear Algebra and TensorsBewertung: 1 von 5 Sternen1/5 (1)
- RobottechnologyDokument13 SeitenRobottechnologyPriya SharmaNoch keine Bewertungen
- Internet TechnologyDokument10 SeitenInternet TechnologyPriya SharmaNoch keine Bewertungen
- Chapter 1 PomDokument14 SeitenChapter 1 PomPriya SharmaNoch keine Bewertungen
- I-ME - Syllabus For MSE II - 2013Dokument1 SeiteI-ME - Syllabus For MSE II - 2013Priya SharmaNoch keine Bewertungen
- Communication and Research SkillsDokument4 SeitenCommunication and Research SkillsPriya SharmaNoch keine Bewertungen
- Internet Technology ProjectDokument1 SeiteInternet Technology ProjectPriya SharmaNoch keine Bewertungen
- Amd Q Bank Sem I 2013Dokument9 SeitenAmd Q Bank Sem I 2013Priya SharmaNoch keine Bewertungen
- Communication and Research SkillsDokument4 SeitenCommunication and Research SkillsPriya SharmaNoch keine Bewertungen
- Mws Mec Ode TXT Runge2nd ExamplesDokument5 SeitenMws Mec Ode TXT Runge2nd ExamplesPriya SharmaNoch keine Bewertungen
- Curve FittingDokument37 SeitenCurve FittingToddharris100% (4)
- Sales of A Product During Some Future Time PeriodDokument4 SeitenSales of A Product During Some Future Time PeriodPriya Sharma0% (1)
- Numerical Methods ProblemsDokument14 SeitenNumerical Methods ProblemsPriya SharmaNoch keine Bewertungen
- Math416 LeastSquaresDokument3 SeitenMath416 LeastSquaresPriya SharmaNoch keine Bewertungen
- Assignmnt 4Dokument1 SeiteAssignmnt 4Priya SharmaNoch keine Bewertungen
- Introduction of Computer Aided Process PlanningDokument25 SeitenIntroduction of Computer Aided Process PlanningPriya SharmaNoch keine Bewertungen
- M e PDFDokument1 SeiteM e PDFMeghavi VaghelaNoch keine Bewertungen
- Gujarat Technological UniversityDokument8 SeitenGujarat Technological UniversityPriya SharmaNoch keine Bewertungen
- Introduction of Computer Aided Process PlanningDokument25 SeitenIntroduction of Computer Aided Process PlanningPriya SharmaNoch keine Bewertungen
- Curve FittingDokument37 SeitenCurve FittingToddharris100% (4)
- Software Penetration TestDokument4 SeitenSoftware Penetration TestSudeep KumarNoch keine Bewertungen
- Accessing Oracle Forms From WorkflowDokument7 SeitenAccessing Oracle Forms From Workflowkumar_amit_99Noch keine Bewertungen
- Procedure To Rectify The Scripting Error On Autosequence and Reporting On Micros 3700Dokument3 SeitenProcedure To Rectify The Scripting Error On Autosequence and Reporting On Micros 3700FisayoNoch keine Bewertungen
- AnsysEMInstallGuide Linux PDFDokument64 SeitenAnsysEMInstallGuide Linux PDFAleAcostaNoch keine Bewertungen
- Os LinuxDokument2 SeitenOs LinuxDavid D'bayuNoch keine Bewertungen
- Lecture 2-Computer Evolution and PerformanceDokument40 SeitenLecture 2-Computer Evolution and PerformanceTahir KhanNoch keine Bewertungen
- D61748GC11 TocDokument14 SeitenD61748GC11 TocNikola SoneNoch keine Bewertungen
- Syllabus 11 Computer Science 2013Dokument4 SeitenSyllabus 11 Computer Science 2013microdotcdmNoch keine Bewertungen
- Best Practice For B2B ExpresswayDokument124 SeitenBest Practice For B2B Expresswaykepke86Noch keine Bewertungen
- Bentley Map Functionality ComparisonDokument4 SeitenBentley Map Functionality ComparisonGolgi AlvarezNoch keine Bewertungen
- SE Assignments PDFDokument24 SeitenSE Assignments PDFashuNoch keine Bewertungen
- Updated Step by Step Guide To Root P8 LiteDokument2 SeitenUpdated Step by Step Guide To Root P8 LiteoscarNoch keine Bewertungen
- Introduction To Embedded SystemsDokument6 SeitenIntroduction To Embedded Systemsరమణ రాజుNoch keine Bewertungen
- Data Flow DiagramDokument51 SeitenData Flow DiagramArka NandyNoch keine Bewertungen
- Data Structures and Algorithms Course IntroductionDokument28 SeitenData Structures and Algorithms Course IntroductionRajat GargNoch keine Bewertungen
- Assignment 8Dokument2 SeitenAssignment 8Sonu ParmaniNoch keine Bewertungen
- Combating Cyber CrimeDokument37 SeitenCombating Cyber CrimePriyankaNoch keine Bewertungen
- Calling An Oracle Stored Proc in JasperDokument10 SeitenCalling An Oracle Stored Proc in Jasperlorenzofranchi6371Noch keine Bewertungen
- Aadhaar E-KYC BasicsDokument9 SeitenAadhaar E-KYC Basicssandy_jadhaoNoch keine Bewertungen
- Sample Test MTCNA 100 PDFDokument3 SeitenSample Test MTCNA 100 PDFcoc EmileyNoch keine Bewertungen
- How To Configure The Windows Default User Profile - Apache VCL - Apache Software FoundationDokument7 SeitenHow To Configure The Windows Default User Profile - Apache VCL - Apache Software FoundationRafael Nery BritoNoch keine Bewertungen
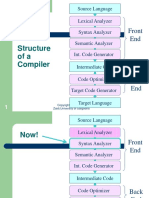
- Structure Ofa Compiler: Front EndDokument95 SeitenStructure Ofa Compiler: Front EndHassan AliNoch keine Bewertungen
- How To Install Ansys 14Dokument1 SeiteHow To Install Ansys 14Edwin Okoampa BoaduNoch keine Bewertungen
- Third Generation of ComputersDokument15 SeitenThird Generation of ComputersHainah Kariza LeusNoch keine Bewertungen
- Final Lab Manual CRNSDokument62 SeitenFinal Lab Manual CRNSAnurag kumarNoch keine Bewertungen
- Config Management RancidDokument9 SeitenConfig Management RancidMohammad Sheraz KhanNoch keine Bewertungen
- Payroll Management SystemDokument16 SeitenPayroll Management Systemphyllis MensahNoch keine Bewertungen