Das könnte Ihnen auch gefallen
- 4 EyeDokument4 Seiten4 EyeMohEladibNoch keine Bewertungen
- Risk Map Business CaseDokument3 SeitenRisk Map Business CaseMohEladibNoch keine Bewertungen
- Tesr 2Dokument47 SeitenTesr 2MohEladibNoch keine Bewertungen
- Engineering valve sizing guideDokument8 SeitenEngineering valve sizing guideMohEladibNoch keine Bewertungen
- Digital Twin (MBL)Dokument3 SeitenDigital Twin (MBL)MohEladibNoch keine Bewertungen
- Safe Shutdown Hydrogen PlanDokument2 SeitenSafe Shutdown Hydrogen PlanMohEladibNoch keine Bewertungen
- Strategic APPDokument4 SeitenStrategic APPMohEladibNoch keine Bewertungen
- 028 Fork The Day 3 Starting ReplDokument1 Seite028 Fork The Day 3 Starting ReplMohEladibNoch keine Bewertungen
- SOS Business CaseDokument3 SeitenSOS Business CaseMohEladibNoch keine Bewertungen
- 2000 01 Efficiency of HRSGDokument7 Seiten2000 01 Efficiency of HRSGMuhammad NaeemNoch keine Bewertungen
- Performance Analysis of A Heat Recovery Steam Generator IJERTV3IS120451Dokument8 SeitenPerformance Analysis of A Heat Recovery Steam Generator IJERTV3IS120451MohEladibNoch keine Bewertungen
- TETRA HRSG Tube Failure Statistics White PaperDokument3 SeitenTETRA HRSG Tube Failure Statistics White PaperMohEladibNoch keine Bewertungen
- Modelling and Simulation For A MultimachDokument5 SeitenModelling and Simulation For A MultimachMohEladibNoch keine Bewertungen
- KLDokument1 SeiteKLMohEladibNoch keine Bewertungen
- 11 and 12 Level 1Dokument2 Seiten11 and 12 Level 1MohEladibNoch keine Bewertungen
- ProjectDokument7 SeitenProjectMohEladibNoch keine Bewertungen
- ChoppersDokument34 SeitenChoppersMohEladibNoch keine Bewertungen
- ECE 422/522 Power System Operations & Planning/Power Systems Analysis II: 7 - Transient StabilityDokument35 SeitenECE 422/522 Power System Operations & Planning/Power Systems Analysis II: 7 - Transient StabilityMohEladibNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Salford Journal of Bridge Engineering Jan-18Dokument24 SeitenSalford Journal of Bridge Engineering Jan-18Swaminathan VivekananthamNoch keine Bewertungen
- Structural Reliability FrameworkDokument65 SeitenStructural Reliability FrameworkkhairurNoch keine Bewertungen
- Response of a turbulent boundary layer to a step change in surface roughnessDokument41 SeitenResponse of a turbulent boundary layer to a step change in surface roughnessFreddie RomeroNoch keine Bewertungen
- D8T HidraulicoDokument13 SeitenD8T Hidraulicoesmeralda100% (1)
- Materi TM-300 28 Feb 2013Dokument26 SeitenMateri TM-300 28 Feb 2013kharimulazizNoch keine Bewertungen
- Wind Loading CalculationDokument2 SeitenWind Loading CalculationMallesh NenkatNoch keine Bewertungen
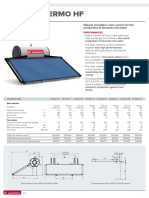
- Kairos Thermo HF Natural Circulation Solar System for Domestic Hot Water ProductionDokument4 SeitenKairos Thermo HF Natural Circulation Solar System for Domestic Hot Water ProductionFILID MADNoch keine Bewertungen
- 4.DB Flats (1-7) & SMDB TypicalDokument9 Seiten4.DB Flats (1-7) & SMDB TypicalhpzenNoch keine Bewertungen
- Accelerator Ap PsDokument2 SeitenAccelerator Ap PsRazvan RaduNoch keine Bewertungen
- ME 291 Engineering Economy: Capitalized Cost Calculation and AnalysisDokument8 SeitenME 291 Engineering Economy: Capitalized Cost Calculation and AnalysisEhsan Ur RehmanNoch keine Bewertungen
- New Copper Sleeves for Volvo Marine Diesel EnginesDokument3 SeitenNew Copper Sleeves for Volvo Marine Diesel EnginesMinaSaeed100% (1)
- 5 Steps To A 5 AP Physics C 2017 - McGraw-HillDokument299 Seiten5 Steps To A 5 AP Physics C 2017 - McGraw-HillRishit Kalra100% (1)
- Metsec Engineering Forms the FutureDokument24 SeitenMetsec Engineering Forms the Futureshashank adigaNoch keine Bewertungen
- Model XQ140/12A Hydraulic Power Tong Operation ManualDokument61 SeitenModel XQ140/12A Hydraulic Power Tong Operation ManualNgwe Min TheinNoch keine Bewertungen
- The Influence of Compressibility On The Aerodynamics of An Inverted Wing in Ground EffectDokument12 SeitenThe Influence of Compressibility On The Aerodynamics of An Inverted Wing in Ground EffectSamson Paul PintoNoch keine Bewertungen
- Hand Operated Can CrusherDokument60 SeitenHand Operated Can CrusherParen Trivedi100% (2)
- HP Valve PDFDokument48 SeitenHP Valve PDFTuanTu NguyenTranNoch keine Bewertungen
- FAGOR Innovation 8kgDokument22 SeitenFAGOR Innovation 8kgmenloparckNoch keine Bewertungen
- Unrestrained Beam With End MomentsDokument9 SeitenUnrestrained Beam With End MomentsNikos StathoulopoulosNoch keine Bewertungen
- Sa 2696 1Dokument1 SeiteSa 2696 1siddiq alviNoch keine Bewertungen
- PortfolioDokument10 SeitenPortfolioapi-550329398Noch keine Bewertungen
- Goulds 3171 / CV3171: Vertical Sump and Process PumpsDokument16 SeitenGoulds 3171 / CV3171: Vertical Sump and Process PumpsJavier Fernando Agudelo GómezNoch keine Bewertungen
- BS en 12334-2001Dokument14 SeitenBS en 12334-2001Udit Kumar SarkarNoch keine Bewertungen
- Brushless AlternatorDokument10 SeitenBrushless AlternatorArun GouthamNoch keine Bewertungen
- Three-Dimensional Force Systems: Today's ObjectivesDokument17 SeitenThree-Dimensional Force Systems: Today's ObjectivesAtef NazNoch keine Bewertungen
- January 2009 QP - Unit 1 Edexcel PhysicsDokument19 SeitenJanuary 2009 QP - Unit 1 Edexcel PhysicsnaamashirNoch keine Bewertungen
- UiiuDokument20 SeitenUiiupravi2010Noch keine Bewertungen
- Flowfit CPA250: Technical InformationDokument8 SeitenFlowfit CPA250: Technical Informationknightfelix12Noch keine Bewertungen
- Pile CapDokument27 SeitenPile CapHafeel Ahamed Ashraf AliNoch keine Bewertungen
- Module 5.2a: Gas Laws Part 1Dokument26 SeitenModule 5.2a: Gas Laws Part 1Ryan PazonNoch keine Bewertungen