Das könnte Ihnen auch gefallen
- Ai Lecture NotesDokument124 SeitenAi Lecture NotesMahesh BabuNoch keine Bewertungen
- Care For The Family CaregiverDokument46 SeitenCare For The Family CaregiverAmy AdamsNoch keine Bewertungen
- Pre-Colonial Philippine ArtDokument5 SeitenPre-Colonial Philippine Artpaulinavera100% (5)
- Ecological Pyramids WorksheetDokument3 SeitenEcological Pyramids Worksheetapi-26236818833% (3)
- AEC 34 - ACB Assignment: Module 1: Problem 1-1.TRUE OR FALSEDokument5 SeitenAEC 34 - ACB Assignment: Module 1: Problem 1-1.TRUE OR FALSEDrew BanlutaNoch keine Bewertungen
- Health NavigatorDokument12 SeitenHealth NavigatorAmy AdamsNoch keine Bewertungen
- On Visual Design Thinking The Vis Kids of ArchitectureDokument18 SeitenOn Visual Design Thinking The Vis Kids of Architecturerpm_8204Noch keine Bewertungen
- Lev Manovich The Engeneering of VisionDokument211 SeitenLev Manovich The Engeneering of Visionjulianalugao100% (1)
- Thinking in Parametric PhenomenologyDokument10 SeitenThinking in Parametric PhenomenologyAlexandre ChienNoch keine Bewertungen
- Deviation Control MethodsDokument4 SeitenDeviation Control MethodsLazuardhy Vozicha FuturNoch keine Bewertungen
- 2017-Process Tracing in Social SciencesDokument28 Seiten2017-Process Tracing in Social SciencesTudor CherhatNoch keine Bewertungen
- Media EthicsDokument11 SeitenMedia EthicsSreekanth Reddy100% (2)
- Visual CogDokument14 SeitenVisual Cogkanni.40976Noch keine Bewertungen
- Advanced HCI - COM719M1: Introduction - Human Capabilities: Cognition and Perception DR Joan CondellDokument63 SeitenAdvanced HCI - COM719M1: Introduction - Human Capabilities: Cognition and Perception DR Joan Condelltanvir rohanNoch keine Bewertungen
- Entropy-Driven Unsupervised Keypoint Representation Learning in VideosDokument29 SeitenEntropy-Driven Unsupervised Keypoint Representation Learning in VideosquinnyijinglinNoch keine Bewertungen
- A Review of Artificial IntelligenceDokument9 SeitenA Review of Artificial IntelligenceCleiber NichidaNoch keine Bewertungen
- Bruckert Imxw 2023Dokument7 SeitenBruckert Imxw 2023Tamas LiszkaNoch keine Bewertungen
- 21 Sent. WORKSHOP IntroductionDokument46 Seiten21 Sent. WORKSHOP Introductionwarezisgr8Noch keine Bewertungen
- Deep Cognitive Gate: Resembling Human Cognition For Saliency DetectionDokument18 SeitenDeep Cognitive Gate: Resembling Human Cognition For Saliency DetectionAblfazl KianiNoch keine Bewertungen
- Brain, Vision and AIDokument292 SeitenBrain, Vision and AIBalasubramanian RavikumarNoch keine Bewertungen
- Visual Object-Oriented Programming: WorkshopDokument3 SeitenVisual Object-Oriented Programming: Workshopkimtinh18012005Noch keine Bewertungen
- 2013CHI-Display Workshop EADokument4 Seiten2013CHI-Display Workshop EAeliasNoch keine Bewertungen
- Mind Maps Denis ParadeDokument6 SeitenMind Maps Denis Paradekavodao_978213089Noch keine Bewertungen
- Hci Ia-1Dokument17 SeitenHci Ia-1Shahithya 4077Noch keine Bewertungen
- Web Semantics: Science, Services and Agents On The World Wide WebDokument5 SeitenWeb Semantics: Science, Services and Agents On The World Wide WebKibrom HaftuNoch keine Bewertungen
- Consciousness and Computational ModelsDokument20 SeitenConsciousness and Computational ModelsAnimesh SinghNoch keine Bewertungen
- Raws W1 W3Dokument6 SeitenRaws W1 W3Rochelle Ann FernandezNoch keine Bewertungen
- Knowledge Representation: Dr. Sumit Srivastava Dept. of CSE, BIT Mesra Ranchi Email:-Sumit@bitmesra - Ac.inDokument6 SeitenKnowledge Representation: Dr. Sumit Srivastava Dept. of CSE, BIT Mesra Ranchi Email:-Sumit@bitmesra - Ac.inspsssagiwalNoch keine Bewertungen
- AdvHCI Introd Week1aDokument66 SeitenAdvHCI Introd Week1aVicci MacciNoch keine Bewertungen
- Instructional Module and Its Components: Course Human Computer Interaction (HCI) Developer and Their BackgroundDokument8 SeitenInstructional Module and Its Components: Course Human Computer Interaction (HCI) Developer and Their BackgroundRovell AsideraNoch keine Bewertungen
- The Conflict of Architectural Intelligence: G: Towards An Integrated Profile of Intelligent Architecture ArchitectureDokument16 SeitenThe Conflict of Architectural Intelligence: G: Towards An Integrated Profile of Intelligent Architecture ArchitectureTHE ARCHNoch keine Bewertungen
- The Pyramid of Information - Criticism and OpportunityDokument10 SeitenThe Pyramid of Information - Criticism and OpportunityIJAERS JOURNALNoch keine Bewertungen
- Understanding Video Events A Survey of MDokument64 SeitenUnderstanding Video Events A Survey of MXiaochun LuoNoch keine Bewertungen
- Knowledge Representation: Concept, Techniques and The Aanalytico-Synthetic ParadigmDokument12 SeitenKnowledge Representation: Concept, Techniques and The Aanalytico-Synthetic Paradigmهيثم محمد عبده قائد المخلافيNoch keine Bewertungen
- Clark - Unravelling The Golden BraidDokument9 SeitenClark - Unravelling The Golden BraidDavid_Silverma_8933Noch keine Bewertungen
- Topic: Motion: Information and MediaDokument9 SeitenTopic: Motion: Information and MediaEdsel ReyesNoch keine Bewertungen
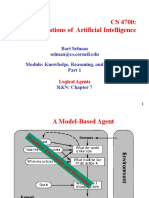
- CS 4700: Foundations of Artificial IntelligenceDokument91 SeitenCS 4700: Foundations of Artificial Intelligenceabdolmojeeb nourNoch keine Bewertungen
- Generating Multimodal Output - Conditions, A D V A N T A G e S and ProblemsDokument5 SeitenGenerating Multimodal Output - Conditions, A D V A N T A G e S and ProblemsAfzal ImamNoch keine Bewertungen
- Human-Computer Interaction: Topic 2: Humans and Technology: HumansDokument37 SeitenHuman-Computer Interaction: Topic 2: Humans and Technology: HumansHIRSIONoch keine Bewertungen
- G11 T2 Phy PA-finalDokument11 SeitenG11 T2 Phy PA-finalChoco BunNoch keine Bewertungen
- Neuro Symbloic 3Dokument19 SeitenNeuro Symbloic 3raky25Noch keine Bewertungen
- Leveraging Recent Advances in Deep Learning For Audio-Visual Emotion RecognitionDokument8 SeitenLeveraging Recent Advances in Deep Learning For Audio-Visual Emotion RecognitionLiam SchoneveldNoch keine Bewertungen
- CS8079 2marksDokument40 SeitenCS8079 2marksmenakadevieceNoch keine Bewertungen
- Writer and Story Writing InvolvesDokument9 SeitenWriter and Story Writing InvolvesbalayogivNoch keine Bewertungen
- Tahani 1990Dokument9 SeitenTahani 1990zouari mariamNoch keine Bewertungen
- L02 - Knowledge-Rep - Part 1Dokument47 SeitenL02 - Knowledge-Rep - Part 1jl289173Noch keine Bewertungen
- All Chapters (Compatibility Mode)Dokument27 SeitenAll Chapters (Compatibility Mode)Ahmad ZaimNoch keine Bewertungen
- Attention in Natural Language Processing: Andrea Galassi, Marco Lippi, and Paolo TorroniDokument18 SeitenAttention in Natural Language Processing: Andrea Galassi, Marco Lippi, and Paolo TorroniTruong GiangNoch keine Bewertungen
- Expert Systems With Applications: Huifeng Tang, Songbo Tan, Xueqi ChengDokument14 SeitenExpert Systems With Applications: Huifeng Tang, Songbo Tan, Xueqi ChengroopachandrikaNoch keine Bewertungen
- Wilkens Et Al-2003-Proceedings of The American Society For Information Science and TechnologyDokument7 SeitenWilkens Et Al-2003-Proceedings of The American Society For Information Science and TechnologyandredesousaNoch keine Bewertungen
- Deep-Emotion: Facial Expression Recognition Using Attentional Convolutional NetworkDokument8 SeitenDeep-Emotion: Facial Expression Recognition Using Attentional Convolutional NetworkGyi GyiNoch keine Bewertungen
- Visual Queries: The Foundation of Visual Thinking: Lecture Notes in Computer Science January 2005Dokument10 SeitenVisual Queries: The Foundation of Visual Thinking: Lecture Notes in Computer Science January 2005Kumud BaliyanNoch keine Bewertungen
- Mathematics Subject Group Overview 2015-16 2Dokument18 SeitenMathematics Subject Group Overview 2015-16 2fjediNoch keine Bewertungen
- Giorgio Roffo: Curriculum VitæDokument10 SeitenGiorgio Roffo: Curriculum Vitæapi-250451564Noch keine Bewertungen
- NLP and Knowledge Engineering To Extract Models From TextDokument17 SeitenNLP and Knowledge Engineering To Extract Models From Textmahdi.fa97Noch keine Bewertungen
- On Single Point Forecasts For Fat-Tailed VariablesDokument10 SeitenOn Single Point Forecasts For Fat-Tailed VariableslerhlerhNoch keine Bewertungen
- Visual Attention While DrivingDokument12 SeitenVisual Attention While DrivingTaisir AlhiloNoch keine Bewertungen
- Object Detection With Deep Learning: A ReviewDokument21 SeitenObject Detection With Deep Learning: A Reviewvikky shrmaNoch keine Bewertungen
- 1-AI Definition - Evolution - Sub Fields-04!01!2024Dokument17 Seiten1-AI Definition - Evolution - Sub Fields-04!01!2024shreyansh.saurav21Noch keine Bewertungen
- Session: Deep Learning: Module: Digital Image Processing Module Code: IMP302Dokument34 SeitenSession: Deep Learning: Module: Digital Image Processing Module Code: IMP302mohammedNoch keine Bewertungen
- GR7. Gasparski. 1994Dokument11 SeitenGR7. Gasparski. 1994David Hernandez AusiqueNoch keine Bewertungen
- SOU Conference PolymathyDokument49 SeitenSOU Conference PolymathyGermano MatiasNoch keine Bewertungen
- Aj13 The-Social-Nature-Of-Representational-Engineering-Knowledge PDFDokument16 SeitenAj13 The-Social-Nature-Of-Representational-Engineering-Knowledge PDFyeneNoch keine Bewertungen
- Multimodal Deep LearningDokument21 SeitenMultimodal Deep Learningsagnik ghosalNoch keine Bewertungen
- GE 4 Unit II Lesson 10Dokument39 SeitenGE 4 Unit II Lesson 10Walwal WalwalNoch keine Bewertungen
- KE QB Questions OnlyDokument7 SeitenKE QB Questions OnlyJohnyNoch keine Bewertungen
- Pattern Recognition by Humans and Machines: Visual PerceptionVon EverandPattern Recognition by Humans and Machines: Visual PerceptionNoch keine Bewertungen
- Computational Intelligence, IIIVon EverandComputational Intelligence, IIIG. ValleNoch keine Bewertungen
- Traveling BrochureDokument2 SeitenTraveling BrochureAmy AdamsNoch keine Bewertungen
- Rock-Solid Stability and Rigidity and Superior Fluorescence TechnologyDokument4 SeitenRock-Solid Stability and Rigidity and Superior Fluorescence TechnologyAmy AdamsNoch keine Bewertungen
- What Is MCVNN?Dokument2 SeitenWhat Is MCVNN?Amy AdamsNoch keine Bewertungen
- Tip 37 BrochureDokument4 SeitenTip 37 BrochureAmy AdamsNoch keine Bewertungen
- Bergstrom and Bergstrom 06Dokument8 SeitenBergstrom and Bergstrom 06Robert FetchNoch keine Bewertungen
- Thesis LogDokument31 SeitenThesis LogAmy Adams0% (1)
- Fucidin (R) OintmentDokument4 SeitenFucidin (R) OintmentAmy AdamsNoch keine Bewertungen
- Diss These SDokument3 SeitenDiss These SAmy AdamsNoch keine Bewertungen
- Naval Postgraduate School Monterey California 93943 5138 NPS 09-05-002Dokument129 SeitenNaval Postgraduate School Monterey California 93943 5138 NPS 09-05-002sambala4444Noch keine Bewertungen
- AndroMen Forte 5 CMIDokument2 SeitenAndroMen Forte 5 CMIAmy AdamsNoch keine Bewertungen
- Code Manual: The Seer ProgramDokument180 SeitenCode Manual: The Seer ProgramAmy AdamsNoch keine Bewertungen
- ETX 60 70AT ManualDokument40 SeitenETX 60 70AT Manualavijeet2828Noch keine Bewertungen
- U.S. Department of Justice Federal Bureau of Investigation Criminal JusticeDokument142 SeitenU.S. Department of Justice Federal Bureau of Investigation Criminal JusticeAmy AdamsNoch keine Bewertungen
- Ecosystems FYBCom PDFDokument41 SeitenEcosystems FYBCom PDFShouvik palNoch keine Bewertungen
- Chain Rule 3LNDokument2 SeitenChain Rule 3LNsaad khNoch keine Bewertungen
- State Magazine, May 2001Dokument38 SeitenState Magazine, May 2001State MagazineNoch keine Bewertungen
- Prayer For Protection PDFDokument3 SeitenPrayer For Protection PDFtim100% (1)
- Congenital Abnormalities of The Female Reproductive TractDokument14 SeitenCongenital Abnormalities of The Female Reproductive TractMary SheshiraNoch keine Bewertungen
- Bird Beak Adaptations: PurposeDokument9 SeitenBird Beak Adaptations: PurposelilazrbNoch keine Bewertungen
- PESTEL AnalysisDokument2 SeitenPESTEL AnalysisSayantan NandyNoch keine Bewertungen
- Focus: Optimised Efficiency For The Paper IndustryDokument24 SeitenFocus: Optimised Efficiency For The Paper IndustryZoran BadurinaNoch keine Bewertungen
- Oleg Losev NegativeDokument2 SeitenOleg Losev NegativeRyan LizardoNoch keine Bewertungen
- Marketing Plan Potato Food TruckDokument25 SeitenMarketing Plan Potato Food TruckAhasan h. ShuvoNoch keine Bewertungen
- FFL/ A: Tutorial On Reed-Solomon Error Correction CodingDokument144 SeitenFFL/ A: Tutorial On Reed-Solomon Error Correction Codingbatman chamkadarNoch keine Bewertungen
- EWC 662 English Writing Critical Group Work Portfolio: Submitted ToDokument31 SeitenEWC 662 English Writing Critical Group Work Portfolio: Submitted ToNurul Nadia MuhamadNoch keine Bewertungen
- E. What Was The Chinese POW Death Rate in WW2 and The Second Sino-Japanese WarDokument3 SeitenE. What Was The Chinese POW Death Rate in WW2 and The Second Sino-Japanese WarPamela SantosNoch keine Bewertungen
- Frankenstein ExtractDokument1 SeiteFrankenstein ExtractAnneNoch keine Bewertungen
- Colony Earth - Part X: The Myriad WorldsDokument7 SeitenColony Earth - Part X: The Myriad WorldsV. Susan FergusonNoch keine Bewertungen
- Confirmation 2Dokument11 SeitenConfirmation 2حمزة دراغمةNoch keine Bewertungen
- Appendix h6 Diffuser Design InvestigationDokument51 SeitenAppendix h6 Diffuser Design InvestigationVeena NageshNoch keine Bewertungen
- Design Report of STOL Transport AircraftDokument64 SeitenDesign Report of STOL Transport Aircrafthassan wastiNoch keine Bewertungen
- Effect of Different Laser Texture Configurations On Improving Surface Wettability and Wear Characteristics of Ti6Al4V Implant MaterialDokument14 SeitenEffect of Different Laser Texture Configurations On Improving Surface Wettability and Wear Characteristics of Ti6Al4V Implant Materialnitish kumar100% (1)
- CPM Pert Multiple Choice Questions and AnswersDokument2 SeitenCPM Pert Multiple Choice Questions and Answersptarwatkar123Noch keine Bewertungen
- InflibnetDokument3 SeitenInflibnetSuhotra GuptaNoch keine Bewertungen
- Relativity Space-Time and Cosmology - WudkaDokument219 SeitenRelativity Space-Time and Cosmology - WudkaAlan CalderónNoch keine Bewertungen
- Va797h 15 Q 0019 A00001003Dokument35 SeitenVa797h 15 Q 0019 A00001003Hugo GranadosNoch keine Bewertungen
- 2-Amino-5-Aryl-2-Oxazolines.: (,ee TableDokument7 Seiten2-Amino-5-Aryl-2-Oxazolines.: (,ee TableChristopher HowellNoch keine Bewertungen