Das könnte Ihnen auch gefallen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Zonk Machine AnalysisDokument5 SeitenZonk Machine AnalysisRobWileyNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- ZCDDokument5 SeitenZCDotavioalcaldeNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Ellingsen 1761 Local Control Panel GuideDokument35 SeitenEllingsen 1761 Local Control Panel GuidesalamrefighNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
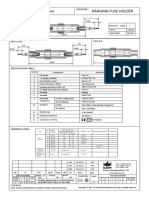
- Hanging fuse holder product detailsDokument1 SeiteHanging fuse holder product detailsbemlNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- AFS 650-655 Installation PDFDokument36 SeitenAFS 650-655 Installation PDFMatijaDebogovićNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Beam AnatomyDokument28 SeitenBeam Anatomymsukhan000Noch keine Bewertungen
- Neumann KPG - Brochure PDFDokument2 SeitenNeumann KPG - Brochure PDFromaoj671Noch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Bcr3Am: Mitsubishi Semiconductor TriacDokument5 SeitenBcr3Am: Mitsubishi Semiconductor TriacbuayamyNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- L010228 - BLY17 Series Product SheetDokument3 SeitenL010228 - BLY17 Series Product SheetnikanikolinaNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Requirement-Supply of Line Materials To TUMKUR Circle For FY 11-12 Till 24.02.2012Dokument27 SeitenRequirement-Supply of Line Materials To TUMKUR Circle For FY 11-12 Till 24.02.2012Bescom GmprocurementNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- Microguard 510: Troubleshooting ManualDokument40 SeitenMicroguard 510: Troubleshooting Manualbuggy bugger100% (1)
- 3NP4070 0ca01Dokument5 Seiten3NP4070 0ca01Jorge Sanchez MuñozNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Power Line Carrier Communication - ETL41-42Dokument81 SeitenPower Line Carrier Communication - ETL41-42Sreenivas Gundu100% (1)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- UAA180 Based VU Meter - EEWeb CommunityDokument1 SeiteUAA180 Based VU Meter - EEWeb CommunityRicardo Alberto BarralNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Chapter 4 DC MachineDokument101 SeitenChapter 4 DC Machinekelemyas ayalew100% (2)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Corrosion Protection of Tanks FRPDokument5 SeitenCorrosion Protection of Tanks FRPaarmasp100% (1)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Surface Review & LettersDokument12 SeitenSurface Review & LettersSujoy ChakrabortyNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- Electrical Cab & ChassisDokument353 SeitenElectrical Cab & ChassisAhmad NursalimNoch keine Bewertungen
- 1 Intermolecular InteractionsDokument64 Seiten1 Intermolecular InteractionsAz Zahra Assyifa UshwahNoch keine Bewertungen
- Generator Aging FactorsDokument25 SeitenGenerator Aging Factorsarvi_vin100% (1)
- Votage Regulation of 33KV LineDokument4 SeitenVotage Regulation of 33KV LinermrcelljsebNoch keine Bewertungen
- LMV358Dokument25 SeitenLMV358Roozbeh BahmanyarNoch keine Bewertungen
- General Service Solenoid Valves: FeaturesDokument4 SeitenGeneral Service Solenoid Valves: FeaturesabrahamNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- RT Level2 SlidesDokument177 SeitenRT Level2 SlidesMohammed ShareefNoch keine Bewertungen
- Photodetectors: 2D Materials and HeterostructuresDokument18 SeitenPhotodetectors: 2D Materials and HeterostructuresVargheseAbinNoch keine Bewertungen
- Form Request OvertimeDokument21 SeitenForm Request OvertimeAndika ArdaNoch keine Bewertungen
- Resistors & Circuits: Ohm's LawDokument8 SeitenResistors & Circuits: Ohm's LawH Aries OñaNoch keine Bewertungen
- Bit 3713Dokument24 SeitenBit 3713neckoprvak5Noch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Capacitor in Series and ParallelDokument3 SeitenCapacitor in Series and ParallelDinesh Kumar MehraNoch keine Bewertungen
- CAT 226 Esquema ElectricoDokument2 SeitenCAT 226 Esquema ElectricocarlosNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)