Das könnte Ihnen auch gefallen
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlVon EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlBewertung: 5 von 5 Sternen5/5 (1)
- Design and Implementation of PhotovoltaicDokument8 SeitenDesign and Implementation of Photovoltaicrostamedastan65Noch keine Bewertungen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Noch keine Bewertungen
- A Modified Perturb and Observe Algorithm For Maximum Power Point Tracking of Photovoltaic System Using Buck-Boost ConverterDokument19 SeitenA Modified Perturb and Observe Algorithm For Maximum Power Point Tracking of Photovoltaic System Using Buck-Boost ConverterDrAdel A. ElbasetNoch keine Bewertungen
- Comparative Analysis of MPPT Techniques ForDokument6 SeitenComparative Analysis of MPPT Techniques ForPIT_Noch keine Bewertungen
- Impact of Partial Shading On The Output Power of PV Systems Under Partial Shading ConditionsDokument10 SeitenImpact of Partial Shading On The Output Power of PV Systems Under Partial Shading Conditionsshihab4806Noch keine Bewertungen
- Analog Control Algorithm For Maximum Power Trackers Employed in Photovoltaic ApplicationsDokument6 SeitenAnalog Control Algorithm For Maximum Power Trackers Employed in Photovoltaic Applicationstinhmaixatoi2006Noch keine Bewertungen
- Novel Maximum Power Point Tracking With Classical Cascaded Voltage and Current Loops For Photovoltaic SystemsDokument5 SeitenNovel Maximum Power Point Tracking With Classical Cascaded Voltage and Current Loops For Photovoltaic SystemsSeth HarrisNoch keine Bewertungen
- Hill Climbing TechniquesDokument10 SeitenHill Climbing TechniquesfarheenNoch keine Bewertungen
- A Single-Stage Three-Phase Grid-Connected Photovoltaic System With Modified MPPT Method and Reactive Power CompensationDokument6 SeitenA Single-Stage Three-Phase Grid-Connected Photovoltaic System With Modified MPPT Method and Reactive Power Compensationsandeepbabu28Noch keine Bewertungen
- A Single Phase Photovoltaic Inverter Control For Grid Connected SystemDokument16 SeitenA Single Phase Photovoltaic Inverter Control For Grid Connected SystemRAMPRASATH EEENoch keine Bewertungen
- Modified Perturb and Observe MPPT Algorithm For Drift Avoidance in Photovoltaic Systems IEEE Paper1-With-Cover-Page-V2Dokument12 SeitenModified Perturb and Observe MPPT Algorithm For Drift Avoidance in Photovoltaic Systems IEEE Paper1-With-Cover-Page-V2houriaNoch keine Bewertungen
- 2 Hill ClimbingDokument6 Seiten2 Hill ClimbingBillel MadridiNoch keine Bewertungen
- Optimizing Sampling of P&O MPPT Technique: 2004 IeeeDokument5 SeitenOptimizing Sampling of P&O MPPT Technique: 2004 IeeeMohamed SaadNoch keine Bewertungen
- Performance Evaluation of Maximum Power Point Tracking Algorithm With Buck-Boost DC-DC Converter For Solar PV SystemDokument5 SeitenPerformance Evaluation of Maximum Power Point Tracking Algorithm With Buck-Boost DC-DC Converter For Solar PV SystemIJSTENoch keine Bewertungen
- Variable Perturbation Size Adaptive P&O MPPT Algorithm For Sudden Changes in IrradianceDokument11 SeitenVariable Perturbation Size Adaptive P&O MPPT Algorithm For Sudden Changes in IrradianceRoberto Alejandro Patiño HaroNoch keine Bewertungen
- Solar Photo Voltaic Water Pumping: Harnessing Maximum PowerDokument8 SeitenSolar Photo Voltaic Water Pumping: Harnessing Maximum PowerIDESNoch keine Bewertungen
- Pscad PV THDDokument6 SeitenPscad PV THDRavishankar KankaleNoch keine Bewertungen
- Paper 04Dokument6 SeitenPaper 04Md ShafiullahNoch keine Bewertungen
- Improved MPPT Converter With Current Compensation Method For Small Scaled PV-ApplicationsDokument6 SeitenImproved MPPT Converter With Current Compensation Method For Small Scaled PV-ApplicationsAnonymous PzbYdcEzNoch keine Bewertungen
- SEPIC Converter Based Photovoltaic System With Particle Swarm Optimization MPPTDokument6 SeitenSEPIC Converter Based Photovoltaic System With Particle Swarm Optimization MPPTWARSE JournalsNoch keine Bewertungen
- Maximum Power Point Tracking (MPPT) Controlling AlgorithmsDokument12 SeitenMaximum Power Point Tracking (MPPT) Controlling Algorithmsrubon khanNoch keine Bewertungen
- The Modified Control Method For The Single-Stage Three-Phase Grid-Connected Photovoltaic SystemDokument14 SeitenThe Modified Control Method For The Single-Stage Three-Phase Grid-Connected Photovoltaic SystemNguyễn Tiến DũngNoch keine Bewertungen
- A Fuzzy-Logic Based MPPT Method For Stand-Alone Wind Turbine SystemDokument8 SeitenA Fuzzy-Logic Based MPPT Method For Stand-Alone Wind Turbine SystemAJER JOURNALNoch keine Bewertungen
- Design of Photovoltaic System Using Buck-Boost Converter Based On MPPT With PID ControllerDokument9 SeitenDesign of Photovoltaic System Using Buck-Boost Converter Based On MPPT With PID ControllerL CHNoch keine Bewertungen
- A New MPPT Method For Low-Power Solar Energy HarvestingDokument10 SeitenA New MPPT Method For Low-Power Solar Energy HarvestingYudhistira CiptaNoch keine Bewertungen
- Development of Improved Incremental Conductance For MPPT in Solar Photovoltaic SystemDokument2 SeitenDevelopment of Improved Incremental Conductance For MPPT in Solar Photovoltaic SystemulaganathanNoch keine Bewertungen
- FloueDokument8 SeitenFloueSAHBI MARROUCHINoch keine Bewertungen
- Analog Maximum Power Point CircuitDokument4 SeitenAnalog Maximum Power Point Circuitvijaygenius123Noch keine Bewertungen
- Content ServerDokument17 SeitenContent Serverayoub reseauNoch keine Bewertungen
- Impact of Modified Perturb and Observe Control OnDokument11 SeitenImpact of Modified Perturb and Observe Control OnOscar BautistaNoch keine Bewertungen
- Adjustable Matched Virtual: Photovoltaic PointDokument5 SeitenAdjustable Matched Virtual: Photovoltaic PointChenchu TnvNoch keine Bewertungen
- Implementation of A DSP-Controlled Photovoltaic System With Peak Power TrackingDokument9 SeitenImplementation of A DSP-Controlled Photovoltaic System With Peak Power Trackingjs_junior07Noch keine Bewertungen
- △p/△ω 0 thenDokument12 Seiten△p/△ω 0 thenserkanNoch keine Bewertungen
- Point Method The Photovoltaic System: Novel Maximum Power Tracking ForDokument5 SeitenPoint Method The Photovoltaic System: Novel Maximum Power Tracking Forramalakshmi_apsNoch keine Bewertungen
- WSE U6 AnswersDokument3 SeitenWSE U6 AnswersOMKAR PATILNoch keine Bewertungen
- IJETR032300Dokument6 SeitenIJETR032300erpublicationNoch keine Bewertungen
- 10.1155@2020@6535372 - CopieDokument18 Seiten10.1155@2020@6535372 - CopiezedibNoch keine Bewertungen
- MPPT Project ReportDokument14 SeitenMPPT Project ReportJackNoch keine Bewertungen
- Optimization of MPPT Step Si in Stand-Alone Solar Pumping SystemsDokument6 SeitenOptimization of MPPT Step Si in Stand-Alone Solar Pumping SystemssunitharajababuNoch keine Bewertungen
- Energies-06-04859 WindmillDokument20 SeitenEnergies-06-04859 WindmillRani PurbasariNoch keine Bewertungen
- Maximum Power Point Tracking Controller For Photovoltaic System Using Sliding Mode ControlDokument5 SeitenMaximum Power Point Tracking Controller For Photovoltaic System Using Sliding Mode Controlt.benaissaNoch keine Bewertungen
- Paper JCR Journal of Power Electronics 2020Dokument12 SeitenPaper JCR Journal of Power Electronics 2020FSergioSellschNoch keine Bewertungen
- POWERQDokument13 SeitenPOWERQKGNoch keine Bewertungen
- Paper IJTEE2020Dokument8 SeitenPaper IJTEE2020Djamila RekiouaNoch keine Bewertungen
- Survey and Review PaperDokument9 SeitenSurvey and Review Paperdavinder SinghNoch keine Bewertungen
- Double-Loop Control Strategy For SRGS: Qing Wang, Hao Chen, Renming ZhaoDokument12 SeitenDouble-Loop Control Strategy For SRGS: Qing Wang, Hao Chen, Renming Zhaotarcioandre1Noch keine Bewertungen
- M.tech ThesisDokument59 SeitenM.tech ThesisRama Krishna100% (1)
- Pat Arau 2011Dokument6 SeitenPat Arau 2011Jakfar GimanNoch keine Bewertungen
- Experimental Test Bench of Photovoltaic Systems Using Backstepping MPPT AlgorithmDokument9 SeitenExperimental Test Bench of Photovoltaic Systems Using Backstepping MPPT AlgorithmMokhlis MohcineNoch keine Bewertungen
- 10 - New MPPT Algorithm Based On PIC Microcontroller - 2016Dokument15 Seiten10 - New MPPT Algorithm Based On PIC Microcontroller - 2016Ammar Al-KindyNoch keine Bewertungen
- T-S Fuzzy Model Based Maximum Power Point Tracking Control of Photovoltaic SystemDokument8 SeitenT-S Fuzzy Model Based Maximum Power Point Tracking Control of Photovoltaic SystemAdvika SharmaNoch keine Bewertungen
- Maximum Power Point Tracking AlgorithmsDokument8 SeitenMaximum Power Point Tracking AlgorithmsVICTOR UCHENoch keine Bewertungen
- Evaluation of The Main MPPT Techniques For Photovoltaic Applications PDFDokument12 SeitenEvaluation of The Main MPPT Techniques For Photovoltaic Applications PDFnmotanNoch keine Bewertungen
- GRDJEV02I050141Dokument12 SeitenGRDJEV02I050141Amresh KumarNoch keine Bewertungen
- Comparative Study of P&O and Inc MPPT AlgorithmsDokument7 SeitenComparative Study of P&O and Inc MPPT AlgorithmsAJER JOURNALNoch keine Bewertungen
- The Maximum Power Point Tracking For Stand-Alone Photovoltaic System Using Current Based Approach IEECON.2017.8075745Dokument4 SeitenThe Maximum Power Point Tracking For Stand-Alone Photovoltaic System Using Current Based Approach IEECON.2017.8075745SijoypJose VelurNoch keine Bewertungen
- Simulation of A Solar MPPT Charger Using Cuk Converter For Standalone ApplicationDokument6 SeitenSimulation of A Solar MPPT Charger Using Cuk Converter For Standalone ApplicationcashnuiNoch keine Bewertungen
- Abt 3747 PaperDokument7 SeitenAbt 3747 PaperhameeeeNoch keine Bewertungen
- Maximum Power Point Tracking MPPT Scheme For Solar Photovoltaic SystemDokument9 SeitenMaximum Power Point Tracking MPPT Scheme For Solar Photovoltaic SystemcesaceNoch keine Bewertungen
- Facts: Flexible AC Transmission SystemsDokument17 SeitenFacts: Flexible AC Transmission SystemsRachna VermaNoch keine Bewertungen
- Facts: Flexible AC Transmission SystemsDokument17 SeitenFacts: Flexible AC Transmission SystemsRachna VermaNoch keine Bewertungen
- 6th Central Pay Commission Salary CalculatorDokument15 Seiten6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- 6th Central Pay Commission Salary CalculatorDokument15 Seiten6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- FactsDokument43 SeitenFactsRachna VermaNoch keine Bewertungen
- TURCK - IM1 22ex RDokument2 SeitenTURCK - IM1 22ex RRamón F. Zapata SánchezNoch keine Bewertungen
- Exam 3 SolutionsDokument11 SeitenExam 3 SolutionsJohn LewisNoch keine Bewertungen
- Presentation On Distribution Automation System (DAS)Dokument18 SeitenPresentation On Distribution Automation System (DAS)A I Md. Sajed Arefin83% (6)
- Medium-Voltage Equipment Siemens USADokument27 SeitenMedium-Voltage Equipment Siemens USAnguyenqldaNoch keine Bewertungen
- Soft-Switching Buck Boost Converter Using Passive Snubber Composed of Pulse Current Regenerative Resonant CircuitDokument5 SeitenSoft-Switching Buck Boost Converter Using Passive Snubber Composed of Pulse Current Regenerative Resonant CircuitHariesh WaranNoch keine Bewertungen
- Air-Preheater Leakage TestDokument2 SeitenAir-Preheater Leakage TestAamirMalikNoch keine Bewertungen
- Technical Sheet CEB Case Study USDokument2 SeitenTechnical Sheet CEB Case Study USluisgomezrojasNoch keine Bewertungen
- AC Mitigation Sample ReportDokument14 SeitenAC Mitigation Sample ReportebalideNoch keine Bewertungen
- 7KM31200BA011DA0 Datasheet enDokument7 Seiten7KM31200BA011DA0 Datasheet enMNSanthoshKumarRajuNoch keine Bewertungen
- Electrical Equipment in Hazardous AreasDokument118 SeitenElectrical Equipment in Hazardous AreasRajeev Valunjkar100% (1)
- Experiment 4 Report TemplateDokument3 SeitenExperiment 4 Report TemplateArwin Dela CruzNoch keine Bewertungen
- KRL Questions of Previous ExamsDokument4 SeitenKRL Questions of Previous ExamsAqmam HaiderNoch keine Bewertungen
- Chapter 2.energy ResoursesDokument41 SeitenChapter 2.energy ResoursesPrathamesh PatilNoch keine Bewertungen
- MV Panorama - NRJCAT21057EN - 0622Dokument40 SeitenMV Panorama - NRJCAT21057EN - 0622BOUCHTAOUI IlyassNoch keine Bewertungen
- Biomass Plants - Detailed GuideDokument123 SeitenBiomass Plants - Detailed GuideBrkaBrkatiNoch keine Bewertungen
- Investigation of The Losses of Photovoltaic Solar Systems During Operation Under Partial ShadingDokument9 SeitenInvestigation of The Losses of Photovoltaic Solar Systems During Operation Under Partial ShadingAbdelilah HilaliNoch keine Bewertungen
- Steam Source BookDokument64 SeitenSteam Source Bookzekson1Noch keine Bewertungen
- 2CSG202471R4051 m4m 30 I oDokument4 Seiten2CSG202471R4051 m4m 30 I oMUHAMMAD TAUFIQNoch keine Bewertungen
- FMEA AssignmentDokument3 SeitenFMEA AssignmentFebrizalNoch keine Bewertungen
- Psr-BrochureDokument50 SeitenPsr-BrochureDanihNoch keine Bewertungen
- 3-Introduction To HVDC Transmission Comparison Between HVDC and HVAC Systems-01-08-2023Dokument29 Seiten3-Introduction To HVDC Transmission Comparison Between HVDC and HVAC Systems-01-08-2023saran killerNoch keine Bewertungen
- Case StudyDokument2 SeitenCase StudyAmana ShazaibNoch keine Bewertungen
- Pws 005311 EmersonDokument4 SeitenPws 005311 EmersonSiddharthJoshiNoch keine Bewertungen
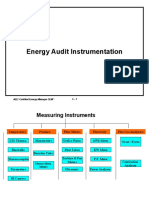
- C - Energy Audit InstrumentationDokument19 SeitenC - Energy Audit InstrumentationghonamyNoch keine Bewertungen
- Bedini's Free Energy Generator PDFDokument7 SeitenBedini's Free Energy Generator PDFturangga ranayaNoch keine Bewertungen
- Virtual Capacitor ExperimentDokument5 SeitenVirtual Capacitor ExperimentKely NúñezNoch keine Bewertungen
- Fuel Metering SystemDokument3 SeitenFuel Metering Systemmellon3duwenNoch keine Bewertungen
- An Innovative Technology For Natural Gas SweeteningDokument2 SeitenAn Innovative Technology For Natural Gas SweeteningZahra GhNoch keine Bewertungen
- Grade 4 Science - FrictionDokument5 SeitenGrade 4 Science - FrictionMis Gloria67% (3)
- Lecture 7 Integration of Renewable Energy SourcesDokument48 SeitenLecture 7 Integration of Renewable Energy Sourcesas2899142Noch keine Bewertungen
- Summary of Neil Postman's Amusing Ourselves to DeathVon EverandSummary of Neil Postman's Amusing Ourselves to DeathBewertung: 4 von 5 Sternen4/5 (2)
- The Things We Make: The Unknown History of Invention from Cathedrals to Soda CansVon EverandThe Things We Make: The Unknown History of Invention from Cathedrals to Soda CansNoch keine Bewertungen
- To Engineer Is Human: The Role of Failure in Successful DesignVon EverandTo Engineer Is Human: The Role of Failure in Successful DesignBewertung: 4 von 5 Sternen4/5 (137)
- Cable Supported Bridges: Concept and DesignVon EverandCable Supported Bridges: Concept and DesignBewertung: 5 von 5 Sternen5/5 (1)
- Crossings: How Road Ecology Is Shaping the Future of Our PlanetVon EverandCrossings: How Road Ecology Is Shaping the Future of Our PlanetBewertung: 4.5 von 5 Sternen4.5/5 (10)
- Troubleshooting and Repair of Diesel EnginesVon EverandTroubleshooting and Repair of Diesel EnginesBewertung: 1.5 von 5 Sternen1.5/5 (2)
- The Finite Element Method: Linear Static and Dynamic Finite Element AnalysisVon EverandThe Finite Element Method: Linear Static and Dynamic Finite Element AnalysisBewertung: 5 von 5 Sternen5/5 (3)
- Structural Analysis 1: Statically Determinate StructuresVon EverandStructural Analysis 1: Statically Determinate StructuresNoch keine Bewertungen
- The Things We Make: The Unknown History of Invention from Cathedrals to Soda CansVon EverandThe Things We Make: The Unknown History of Invention from Cathedrals to Soda CansBewertung: 4.5 von 5 Sternen4.5/5 (21)
- The Great Bridge: The Epic Story of the Building of the Brooklyn BridgeVon EverandThe Great Bridge: The Epic Story of the Building of the Brooklyn BridgeBewertung: 4.5 von 5 Sternen4.5/5 (59)
- CAREC Road Safety Engineering Manual 3: Roadside Hazard ManagementVon EverandCAREC Road Safety Engineering Manual 3: Roadside Hazard ManagementNoch keine Bewertungen
- Structural Cross Sections: Analysis and DesignVon EverandStructural Cross Sections: Analysis and DesignBewertung: 4.5 von 5 Sternen4.5/5 (19)
- Pile Design and Construction Rules of ThumbVon EverandPile Design and Construction Rules of ThumbBewertung: 4.5 von 5 Sternen4.5/5 (15)
- Piping and Pipeline Calculations Manual: Construction, Design Fabrication and ExaminationVon EverandPiping and Pipeline Calculations Manual: Construction, Design Fabrication and ExaminationBewertung: 4 von 5 Sternen4/5 (18)
- Construction Innovation and Process ImprovementVon EverandConstruction Innovation and Process ImprovementAkintola AkintoyeNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Finite Element Analysis and Design of Steel and Steel–Concrete Composite BridgesVon EverandFinite Element Analysis and Design of Steel and Steel–Concrete Composite BridgesNoch keine Bewertungen
- Rocks and Minerals of The World: Geology for Kids - Minerology and SedimentologyVon EverandRocks and Minerals of The World: Geology for Kids - Minerology and SedimentologyBewertung: 4.5 von 5 Sternen4.5/5 (5)
- Engineering Rock Mass Classification: Tunnelling, Foundations and LandslidesVon EverandEngineering Rock Mass Classification: Tunnelling, Foundations and LandslidesBewertung: 4 von 5 Sternen4/5 (5)
- Up and Running with AutoCAD 2020: 2D Drafting and DesignVon EverandUp and Running with AutoCAD 2020: 2D Drafting and DesignNoch keine Bewertungen
- Skyway: The True Story of Tampa Bay's Signature Bridge and the Man Who Brought It DownVon EverandSkyway: The True Story of Tampa Bay's Signature Bridge and the Man Who Brought It DownNoch keine Bewertungen
- Transportation Decision Making: Principles of Project Evaluation and ProgrammingVon EverandTransportation Decision Making: Principles of Project Evaluation and ProgrammingNoch keine Bewertungen