Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- 11 Understand and Use Sepam UMIDokument30 Seiten11 Understand and Use Sepam UMIThức Võ100% (1)
- Tutorial - Digital Audio Re Sampling - Julius SmithDokument19 SeitenTutorial - Digital Audio Re Sampling - Julius SmithyonodioNoch keine Bewertungen
- ISSCC ShortCourseDokument3 SeitenISSCC ShortCoursesanjayr_nittNoch keine Bewertungen
- Schaum's OutlinesDokument4 SeitenSchaum's OutlinesSer John Lynon Perez100% (1)
- Upec CF XFDokument124 SeitenUpec CF XFPaul93% (15)
- DSP For BeginnersDokument49 SeitenDSP For BeginnersGordon Ariho100% (1)
- Ijest NG Vol2 No1 Complete IssueDokument216 SeitenIjest NG Vol2 No1 Complete IssueUkemebookieNoch keine Bewertungen
- Reb 500Dokument34 SeitenReb 500vsrikala68Noch keine Bewertungen
- Thesis Report FinalDokument25 SeitenThesis Report FinalThanhha Nguyen100% (2)
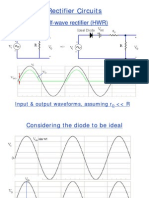
- Rectifier Circuits: Half-Wave Rectifier (HWR)Dokument18 SeitenRectifier Circuits: Half-Wave Rectifier (HWR)Md ArifNoch keine Bewertungen
- Introduction To Wavelets and Wavelet Transforms - A Primer, Brrus C. S., 1998.Dokument281 SeitenIntroduction To Wavelets and Wavelet Transforms - A Primer, Brrus C. S., 1998.Srikanth Varanasi100% (3)
- Anna University ECE Curriculum and SyllabusDokument117 SeitenAnna University ECE Curriculum and SyllabusNalini MadhesNoch keine Bewertungen
- Canon Lbp2900 Lbp3000 Series SMDokument106 SeitenCanon Lbp2900 Lbp3000 Series SMLenin Babu100% (1)
- Lecture 1Dokument21 SeitenLecture 1Mtende MosesNoch keine Bewertungen
- Describing an FSM to detect even number of p's and q'sDokument10 SeitenDescribing an FSM to detect even number of p's and q'sIndranil ChakrabortyNoch keine Bewertungen
- Basic Electronics: An Introduction Course For The Students of Information Systems SciencesDokument15 SeitenBasic Electronics: An Introduction Course For The Students of Information Systems SciencesMoses TorkudzorNoch keine Bewertungen
- Jawaharlal Nehru Technological University Hyderabad II Year B.Tech. EEE. I-Sem (R09)Dokument4 SeitenJawaharlal Nehru Technological University Hyderabad II Year B.Tech. EEE. I-Sem (R09)Habeeb PashaNoch keine Bewertungen
- Guide Cu2 CuvcDokument151 SeitenGuide Cu2 CuvcEngr Huzaifa QureshiNoch keine Bewertungen
- Hart Communication: A Seminar ReportDokument8 SeitenHart Communication: A Seminar Reportmhtchdhry06_99367187Noch keine Bewertungen
- Data Transfer On CAN Data Bus II para ImprimirDokument60 SeitenData Transfer On CAN Data Bus II para ImprimirFernando Jordan Barreto100% (1)
- Relay Technologies (2) - 2 PDFDokument34 SeitenRelay Technologies (2) - 2 PDFItumeleng Tumi LamolaNoch keine Bewertungen
- E2374Dokument5 SeitenE2374Morales100% (1)
- REPORT On Power Line Carrier CommunicationDokument28 SeitenREPORT On Power Line Carrier CommunicationAshish Jain100% (4)
- Multirate Digital Signal Processing1 Crochiere Rabiner PDFDokument431 SeitenMultirate Digital Signal Processing1 Crochiere Rabiner PDFlakshmi_innovatorNoch keine Bewertungen
- SPM D11Dokument82 SeitenSPM D11Jaweria SiddiquiNoch keine Bewertungen
- OFDM OpticalDokument16 SeitenOFDM OpticalAnh Nguyen100% (1)
- LD1916K Service Manual GuideDokument102 SeitenLD1916K Service Manual GuideTotal58Noch keine Bewertungen
- Multimedia Systems and Applications Lecture 02 PDFDokument17 SeitenMultimedia Systems and Applications Lecture 02 PDFHaque Nawaz Lashari100% (1)
- Pengolahan Sinyal - Bab 1Dokument20 SeitenPengolahan Sinyal - Bab 1YehudhaWillySNoch keine Bewertungen
- $R0C1OHADokument353 Seiten$R0C1OHAwood_ksd32510% (2)