Das könnte Ihnen auch gefallen
- Engenharia IIDokument40 SeitenEngenharia IIMarioNoch keine Bewertungen
- Semana Acadêmica UFT - AlcyDokument32 SeitenSemana Acadêmica UFT - AlcyAlcy Monteiro JrNoch keine Bewertungen
- Gab05 engIIDokument1 SeiteGab05 engIILuis Cláudio LANoch keine Bewertungen
- PR Eng IIDokument4 SeitenPR Eng IILuis Cláudio LANoch keine Bewertungen
- Manual de Instruções Verano - Aquecimento de PiscinaDokument22 SeitenManual de Instruções Verano - Aquecimento de PiscinaAlcy Monteiro Jr0% (1)
- R0003 2Dokument10 SeitenR0003 2Alcy Monteiro JrNoch keine Bewertungen
- Caderno Tematico Micro e Minigeração Distribuida - 2 Edicao PDFDokument34 SeitenCaderno Tematico Micro e Minigeração Distribuida - 2 Edicao PDFPatricio AbraaoNoch keine Bewertungen
- Diretrizes Selo Solar REV2014 DezDokument9 SeitenDiretrizes Selo Solar REV2014 DezAlcy Monteiro JrNoch keine Bewertungen
- Simulador Tarifas Anual v281015Dokument20 SeitenSimulador Tarifas Anual v281015Alcy Monteiro JrNoch keine Bewertungen
- Abnt Ufrgs 2010Dokument50 SeitenAbnt Ufrgs 2010Alcy Monteiro JrNoch keine Bewertungen
- Componentes SimétricosDokument26 SeitenComponentes SimétricosGuiandgui GuiNoch keine Bewertungen
- Abnt NBR 15287 2011 Projeto de PesquisaDokument12 SeitenAbnt NBR 15287 2011 Projeto de PesquisaIsmael Chaves100% (1)
- Allan Cbqee 2011Dokument6 SeitenAllan Cbqee 2011Alcy Monteiro JrNoch keine Bewertungen
- Dispositivos Semicondutores Almeida Tiristores PDFDokument71 SeitenDispositivos Semicondutores Almeida Tiristores PDFAlcy Monteiro JrNoch keine Bewertungen
- Apostila Micro Do Gustavo WeberDokument34 SeitenApostila Micro Do Gustavo WeberAlcy Monteiro JrNoch keine Bewertungen
- Índices de Produtividade Na Montagem de Usinas Fotovoltaicas No Brasil. Estudo de Caso - Usina Solar Fotovoltaica São Lourenço Da MataDokument9 SeitenÍndices de Produtividade Na Montagem de Usinas Fotovoltaicas No Brasil. Estudo de Caso - Usina Solar Fotovoltaica São Lourenço Da MataToninho PorpinoNoch keine Bewertungen
- PE 02 ComandosDokument2 SeitenPE 02 ComandosAlcy Monteiro JrNoch keine Bewertungen
- PE 02 EletronicaAnalogicaDokument2 SeitenPE 02 EletronicaAnalogicaAlcy Monteiro JrNoch keine Bewertungen
- PE 03 ConversaoDokument2 SeitenPE 03 Conversaoarabutan1820Noch keine Bewertungen
- Lista1 Harmonicos AlcyDokument24 SeitenLista1 Harmonicos AlcyAlcy Monteiro JrNoch keine Bewertungen
- Dissertacao de Pedro Machado PDFDokument183 SeitenDissertacao de Pedro Machado PDFAlcy Monteiro JrNoch keine Bewertungen
- Dicionário Ou Glossário Do Setor ElétricoDokument30 SeitenDicionário Ou Glossário Do Setor ElétricoAlcy Monteiro JrNoch keine Bewertungen
- PE 06 AutomacaoDokument2 SeitenPE 06 AutomacaoAlcy Monteiro JrNoch keine Bewertungen
- Eee959 0 PDFDokument10 SeitenEee959 0 PDFAlcy Monteiro JrNoch keine Bewertungen
- Eee959 1 PDFDokument43 SeitenEee959 1 PDFAlcy Monteiro JrNoch keine Bewertungen
- Tutorial de Matlab - Controle de FluxoDokument3 SeitenTutorial de Matlab - Controle de FluxoAlcy Monteiro JrNoch keine Bewertungen
- Tutorial de Matlab - Operações Com ConjuntosDokument3 SeitenTutorial de Matlab - Operações Com ConjuntosAlcy Monteiro JrNoch keine Bewertungen
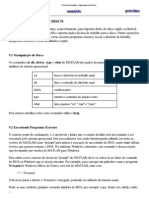
- Tutorial de Matlab - Operações em DiscoDokument3 SeitenTutorial de Matlab - Operações em DiscoAlcy Monteiro JrNoch keine Bewertungen
- Filipetas Onduline Clássica FITDokument2 SeitenFilipetas Onduline Clássica FIT1otoNoch keine Bewertungen
- Como Usar A HP-50g para CalculoDokument12 SeitenComo Usar A HP-50g para CalculoEliezerNoch keine Bewertungen
- Artigo Edao-Comp - Reg - Primária - Cenários - Baixa - Hidraulicidade PDFDokument15 SeitenArtigo Edao-Comp - Reg - Primária - Cenários - Baixa - Hidraulicidade PDFgdcerq8134Noch keine Bewertungen
- 367891-Exercício PascalzimDokument4 Seiten367891-Exercício PascalzimDiego OliveiraNoch keine Bewertungen
- Aula 1 - 06 e 07 - 12 - 2022Dokument85 SeitenAula 1 - 06 e 07 - 12 - 2022pretteluizNoch keine Bewertungen
- Ats2 PDFDokument12 SeitenAts2 PDFUenis Pinto TavaresNoch keine Bewertungen
- Unidade 2 Desenvolvimento de Software para WebDokument8 SeitenUnidade 2 Desenvolvimento de Software para WebGustavo DE PaulaNoch keine Bewertungen
- Aula - Dim Mancais de DeslizamentoDokument34 SeitenAula - Dim Mancais de Deslizamentohelton_bsbNoch keine Bewertungen
- Lista de Exercícios - SoluçõesDokument3 SeitenLista de Exercícios - SoluçõesJeane Rodrigues BrederNoch keine Bewertungen
- Ficha de Trabalho - Tabela Periódica - 10º Ano QuímicaDokument6 SeitenFicha de Trabalho - Tabela Periódica - 10º Ano QuímicaTeresa CaldeiraNoch keine Bewertungen
- Densimetria de Materiais GranuladoDokument5 SeitenDensimetria de Materiais GranuladoGirlane SantosNoch keine Bewertungen
- Complexacao ESALQ PDFDokument176 SeitenComplexacao ESALQ PDFGaby Salazar Mogollón100% (1)
- Aula 9Dokument40 SeitenAula 9William Breternitz100% (1)
- Colaborar - Av1 - Linguagem Orientada A ObjetosDokument3 SeitenColaborar - Av1 - Linguagem Orientada A Objetoselyasmin007Noch keine Bewertungen
- Magia Do AmorDokument273 SeitenMagia Do AmorJoão Marques Ferreira67% (6)
- Mzup3 Fichas Recuperacao 2anoDokument32 SeitenMzup3 Fichas Recuperacao 2anoBeatriz Galharda de LavosNoch keine Bewertungen
- 3 - Estática Dos Fluidos - 2Dokument29 Seiten3 - Estática Dos Fluidos - 2Eliziane LeonNoch keine Bewertungen
- Resumo - BiomecanicaDokument9 SeitenResumo - BiomecanicaSandraMorethNoch keine Bewertungen
- Relatorio de Produção Magnésio MetálicoDokument39 SeitenRelatorio de Produção Magnésio MetálicoSidney OliveiraNoch keine Bewertungen
- PFD BPA Final-Páginas-1Dokument1 SeitePFD BPA Final-Páginas-1Luiz Rodrigo AssisNoch keine Bewertungen
- Stanadyne DE10 Pump (001-050) .En - PTDokument50 SeitenStanadyne DE10 Pump (001-050) .En - PTwillyan100% (2)
- Ap Matemática 6 Série EfDokument304 SeitenAp Matemática 6 Série EfAlexandre MarianoNoch keine Bewertungen
- Balanceamento de Maquinas Rotativas Com 1 Ou 2 Planos de Correcao PDFDokument6 SeitenBalanceamento de Maquinas Rotativas Com 1 Ou 2 Planos de Correcao PDFset_ltdaNoch keine Bewertungen
- Oficina Pedagogica - PLANO DE AULADokument5 SeitenOficina Pedagogica - PLANO DE AULAMara SilvaNoch keine Bewertungen
- Slides de Tecnologia Mecanica 17.07.18BDokument5 SeitenSlides de Tecnologia Mecanica 17.07.18BAlfredo AlarNoch keine Bewertungen
- MATEMÁTICADokument118 SeitenMATEMÁTICASuelen SantosNoch keine Bewertungen
- Manual Usuario - Manual DVDokument5 SeitenManual Usuario - Manual DVGisseli MontanariNoch keine Bewertungen
- Apostila de Brigada de EmergênciaDokument37 SeitenApostila de Brigada de EmergênciaLucas SerranoNoch keine Bewertungen
- Quest 07 - Revisão - GabDokument8 SeitenQuest 07 - Revisão - GabmisaelinacioNoch keine Bewertungen
- Carenagem-FechadaDokument2 SeitenCarenagem-FechadaItalo ThomasNoch keine Bewertungen