Das könnte Ihnen auch gefallen
- Gafhsx 1Dokument1 SeiteGafhsx 1Nurul HudaNoch keine Bewertungen
- DFHW112Dokument1 SeiteDFHW112Nurul HudaNoch keine Bewertungen
- Prakt +kimia+organik+life+skillDokument1 SeitePrakt +kimia+organik+life+skillNurul HudaNoch keine Bewertungen
- DFH5342Dokument1 SeiteDFH5342Nurul HudaNoch keine Bewertungen
- Elastic BeaconsDokument9 SeitenElastic BeaconsNurul HudaNoch keine Bewertungen
- Autocrashsimulation InpDokument2 SeitenAutocrashsimulation InpNurul HudaNoch keine Bewertungen
- SE ThreadsDokument1 SeiteSE ThreadsNurul HudaNoch keine Bewertungen
- Analysis and Design of Marine Structures V Digital PDFDokument4 SeitenAnalysis and Design of Marine Structures V Digital PDFNurul Huda0% (1)
- 25 Abaqus ODBDokument6 Seiten25 Abaqus ODBNurul HudaNoch keine Bewertungen
- Hex Bolt Unc Series 1 4x20x0 75 Ansi b18!2!1Dokument1 SeiteHex Bolt Unc Series 1 4x20x0 75 Ansi b18!2!1Nurul HudaNoch keine Bewertungen
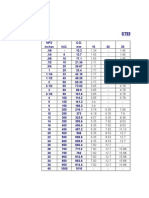
- Steel Pipes - Pipe Schedule ChartDokument3 SeitenSteel Pipes - Pipe Schedule ChartNurul HudaNoch keine Bewertungen
- Designmodeler: Workshop 5.1 3D CurveDokument8 SeitenDesignmodeler: Workshop 5.1 3D CurveNurul HudaNoch keine Bewertungen
- Asme B30Dokument1 SeiteAsme B30Nurul Huda100% (1)
- Eval Seismic ReqDokument12 SeitenEval Seismic ReqJoe LulekNoch keine Bewertungen
- Method For Finding Stress in Cylinders With Radial NozzlesDokument10 SeitenMethod For Finding Stress in Cylinders With Radial NozzlesmatodelanusNoch keine Bewertungen
- Generate Response Spectra in MSC NastranDokument16 SeitenGenerate Response Spectra in MSC NastranNurul HudaNoch keine Bewertungen
- SfgawyDokument1 SeiteSfgawyNurul HudaNoch keine Bewertungen
- Fatigue Analysis Tool 1.0Dokument2 SeitenFatigue Analysis Tool 1.0Nurul HudaNoch keine Bewertungen
- PVEdwg 4225 0 0 PDFDokument3 SeitenPVEdwg 4225 0 0 PDFSaša ĐorđevićNoch keine Bewertungen
- Ty PVDokument3 SeitenTy PVNurul HudaNoch keine Bewertungen
- Spring Analysis Tool3Dokument4 SeitenSpring Analysis Tool3Nurul HudaNoch keine Bewertungen
- SfgawyDokument1 SeiteSfgawyNurul HudaNoch keine Bewertungen
- VHNDDokument1 SeiteVHNDNurul HudaNoch keine Bewertungen
- Ty PVDokument1 SeiteTy PVNurul HudaNoch keine Bewertungen
- PSI 415 1 enDokument2 SeitenPSI 415 1 enAstraopcNoch keine Bewertungen
- UndDokument1 SeiteUndNurul HudaNoch keine Bewertungen
- SsaDokument1 SeiteSsaNurul HudaNoch keine Bewertungen
- SfdeaDokument1 SeiteSfdeaNurul HudaNoch keine Bewertungen
- DSFDokument1 SeiteDSFNurul HudaNoch keine Bewertungen
- StyDokument1 SeiteStyNurul HudaNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Fluid Mechanics and Machinery: Aero-3BDokument41 SeitenFluid Mechanics and Machinery: Aero-3BSuresh ChinnathambiNoch keine Bewertungen
- Numerical Simulation of Frost Heave With Coupled Water Freezing, Temperature and Stress Fields in Tunnel ExcavationDokument11 SeitenNumerical Simulation of Frost Heave With Coupled Water Freezing, Temperature and Stress Fields in Tunnel ExcavationAbdelali SolNoch keine Bewertungen
- Cur-037-2 Summative Assessment #1 - Week 1Dokument3 SeitenCur-037-2 Summative Assessment #1 - Week 1Dame YooheeNoch keine Bewertungen
- Forces and EquilibriumDokument6 SeitenForces and EquilibriumMelissa ChaiNoch keine Bewertungen
- Compressible Flow in A Nozzle: SPC 407 Supersonic & Hypersonic Fluid Dynamics Ansys Fluent Tutorial 1Dokument19 SeitenCompressible Flow in A Nozzle: SPC 407 Supersonic & Hypersonic Fluid Dynamics Ansys Fluent Tutorial 1Jorge A. KáramNoch keine Bewertungen
- MPE 442 - Mechanical Vibrations (2020)Dokument95 SeitenMPE 442 - Mechanical Vibrations (2020)Daniel MueniNoch keine Bewertungen
- Projectile motion worksheet case 1Dokument2 SeitenProjectile motion worksheet case 1leah ruales100% (1)
- l0k ch02bDokument14 Seitenl0k ch02bRezende JulioNoch keine Bewertungen
- Linear Vibration Analysis of Cantilever Plates Partially Submerged in FluidDokument13 SeitenLinear Vibration Analysis of Cantilever Plates Partially Submerged in FluidbrennomourabmcNoch keine Bewertungen
- Img 1536Dokument1 SeiteImg 1536Dennis Dale FanogaNoch keine Bewertungen
- Drilling Practices: Basic Drill String DesignDokument15 SeitenDrilling Practices: Basic Drill String Designeng20072007Noch keine Bewertungen
- Classical Mechanics Qualification Exam Solved ProblemsDokument94 SeitenClassical Mechanics Qualification Exam Solved Problemsnilthon pomaNoch keine Bewertungen
- Reviewer in PhysicsDokument90 SeitenReviewer in PhysicsLouise RonquilloNoch keine Bewertungen
- Thermodynamics Module 5: Assessment Task 5: Laguna University College of Education A.Y 2020-2021Dokument20 SeitenThermodynamics Module 5: Assessment Task 5: Laguna University College of Education A.Y 2020-2021anembam putobungbongNoch keine Bewertungen
- Assignment - 1 Solution PDFDokument7 SeitenAssignment - 1 Solution PDFDavid StuartNoch keine Bewertungen
- Disha DPP (Topicwise)Dokument413 SeitenDisha DPP (Topicwise)pegasuspretty903Noch keine Bewertungen
- Tutorial Ansys ApdlDokument4 SeitenTutorial Ansys Apdlep_frenz100% (1)
- UACE Physics P1 RevisionDokument7 SeitenUACE Physics P1 RevisionKitone A NdrewNoch keine Bewertungen
- Seismic Petrophysics PDFDokument28 SeitenSeismic Petrophysics PDFmunaf afridiNoch keine Bewertungen
- 6-Modeling of Fluid SystemsDokument25 Seiten6-Modeling of Fluid SystemsAzhar AliNoch keine Bewertungen
- Analisis Struktur C2Dokument18 SeitenAnalisis Struktur C2Hazyema HarunNoch keine Bewertungen
- Wiedemann-Franz Law PDFDokument3 SeitenWiedemann-Franz Law PDFArunraj KasiNoch keine Bewertungen
- Determination of Elastic Modulus From Stress Controlled Cone Penetration TestDokument5 SeitenDetermination of Elastic Modulus From Stress Controlled Cone Penetration TestDiego Enrique Durán CaballeroNoch keine Bewertungen
- Class Notes - PDF Solids1Dokument96 SeitenClass Notes - PDF Solids1joeNoch keine Bewertungen
- Chapter 4. Translational Equilibrium and Friction.: Free-Body DiagramsDokument16 SeitenChapter 4. Translational Equilibrium and Friction.: Free-Body DiagramsAlma GalvànNoch keine Bewertungen
- Universal Governor AppartusDokument21 SeitenUniversal Governor Appartusramniwas123Noch keine Bewertungen
- MotionDokument200 SeitenMotionOptics Career Institute -OCINoch keine Bewertungen
- Report on FrictionDokument6 SeitenReport on FrictionYogesh RanjanNoch keine Bewertungen
- Robot Vacuum Cleaner: Joel Bergman and Jonas LindDokument70 SeitenRobot Vacuum Cleaner: Joel Bergman and Jonas LindMít Tơ TươiNoch keine Bewertungen
- Large-Scale Triaxial TestingDokument15 SeitenLarge-Scale Triaxial TestingMarco NevesNoch keine Bewertungen