Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- 2014 AUT 48561 v4 Standard City 24-2-14Dokument10 Seiten2014 AUT 48561 v4 Standard City 24-2-14Min Khine KyawNoch keine Bewertungen
- Common Mistakes at IELTS Advanced PDFDokument35 SeitenCommon Mistakes at IELTS Advanced PDFMin Khine KyawNoch keine Bewertungen
- Project Groups V5 12-3-14Dokument1 SeiteProject Groups V5 12-3-14Min Khine KyawNoch keine Bewertungen
- Lab 2 Post LabDokument9 SeitenLab 2 Post LabMin Khine KyawNoch keine Bewertungen
- DC Series Motor: Voltage Vs Speed: Speed: N (Rev/min) Current: I (A) Voltage: V (V) 1478 1328 1240 1040 820 528 280Dokument12 SeitenDC Series Motor: Voltage Vs Speed: Speed: N (Rev/min) Current: I (A) Voltage: V (V) 1478 1328 1240 1040 820 528 280Min Khine KyawNoch keine Bewertungen
- PSAD Slides Lec1 Synchronous Machine ModelDokument56 SeitenPSAD Slides Lec1 Synchronous Machine ModelMin Khine KyawNoch keine Bewertungen
- IRF9540Dokument8 SeitenIRF9540laplacexxxNoch keine Bewertungen
- Signals and Systems - Project Notes - Autumn 2012Dokument37 SeitenSignals and Systems - Project Notes - Autumn 2012Min Khine KyawNoch keine Bewertungen
- Assignments and Project 2014aDokument32 SeitenAssignments and Project 2014aMin Khine KyawNoch keine Bewertungen
- Lecture Notes From Peter Mclean, UTSDokument599 SeitenLecture Notes From Peter Mclean, UTSMin Khine KyawNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- NPC Power System Protection PhilosophyDokument60 SeitenNPC Power System Protection PhilosophySellappan Muthusamy100% (3)
- Kinematics in One Dimension: X V T at V V + at X V T+ atDokument67 SeitenKinematics in One Dimension: X V T at V V + at X V T+ atHel JustNoch keine Bewertungen
- Fig. 1: Clap Switch Block DiagramDokument26 SeitenFig. 1: Clap Switch Block DiagramDiljot Singh 236Noch keine Bewertungen
- Kinematics 1Dokument6 SeitenKinematics 1Shiva Ram Prasad PulagamNoch keine Bewertungen
- Week 13-HE-Hydropower EngineeringDokument32 SeitenWeek 13-HE-Hydropower EngineeringAnwaar SafdarNoch keine Bewertungen
- Projectile Motion PDFDokument19 SeitenProjectile Motion PDFRamesh BadamNoch keine Bewertungen
- SEN-30201: MAX31865 RTD-to-Digital Breakout Board, Multiple Cal OptionsDokument8 SeitenSEN-30201: MAX31865 RTD-to-Digital Breakout Board, Multiple Cal OptionsAchref NajjarNoch keine Bewertungen
- Cow SpreadsheetDokument28 SeitenCow SpreadsheetSunilGangwarNoch keine Bewertungen
- Service Manual MDF-U5412: Biomedical FreezerDokument64 SeitenService Manual MDF-U5412: Biomedical FreezerРинат ЖахинNoch keine Bewertungen
- Eti Ohe 16 - 1 94Dokument27 SeitenEti Ohe 16 - 1 94Abhishek Pandey100% (1)
- MATHS UNIT-2b - 15012019Dokument43 SeitenMATHS UNIT-2b - 15012019Susheel GuptaNoch keine Bewertungen
- Systemair MUB - F 042 400D4Dokument2 SeitenSystemair MUB - F 042 400D4diziodavide21Noch keine Bewertungen
- Unidad 3 Norma IEEE PDFDokument27 SeitenUnidad 3 Norma IEEE PDFBryan Andres Reyes CaamañoNoch keine Bewertungen
- Week 2 - Piping Friction Loss 1t 2022-2023Dokument113 SeitenWeek 2 - Piping Friction Loss 1t 2022-2023Mcoy DomingoNoch keine Bewertungen
- TN17-1003 Pruebas de NucleoDokument6 SeitenTN17-1003 Pruebas de NucleoAlonsoNoch keine Bewertungen
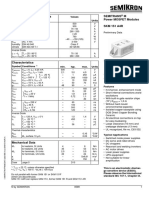
- Absolute Maximum Ratings Semitrans M Power MOSFET Modules SKM 151 A4RDokument5 SeitenAbsolute Maximum Ratings Semitrans M Power MOSFET Modules SKM 151 A4RChaovalit Jitsinthu100% (1)
- Chapter 2 Exercises Part2Dokument2 SeitenChapter 2 Exercises Part2Cedric MunlawinNoch keine Bewertungen
- Resonant Induction Heater PDFDokument225 SeitenResonant Induction Heater PDFBoodyBedaiweNoch keine Bewertungen
- Revisi AnggaranDokument11 SeitenRevisi Anggaranmas udinNoch keine Bewertungen
- Unified Power Flow ControllerDokument17 SeitenUnified Power Flow ControllerAdeniji Olusegun50% (2)
- Final ProjectDokument37 SeitenFinal ProjectManirathnam KarumanchiNoch keine Bewertungen
- Pec Answers 401 To 500Dokument11 SeitenPec Answers 401 To 500Edward Roy “Ying” AyingNoch keine Bewertungen
- Fluid Mechanics Lab Exp # 4Dokument6 SeitenFluid Mechanics Lab Exp # 4Furqan AhmadNoch keine Bewertungen
- Origin Have A Negative Y-Value, and Points Below A Positive Y-Value. We Have That, ForDokument4 SeitenOrigin Have A Negative Y-Value, and Points Below A Positive Y-Value. We Have That, ForVictor CoronelNoch keine Bewertungen
- Problem Set 1Dokument2 SeitenProblem Set 1Lovedeep SinghNoch keine Bewertungen
- SR Inter IPE Question Bank Chapter-XII (DUAL NATURE OF RADIATION AND MATTER)Dokument1 SeiteSR Inter IPE Question Bank Chapter-XII (DUAL NATURE OF RADIATION AND MATTER)sojakoj867Noch keine Bewertungen
- Total Power Int'L: S2A00R Series 3 Watt Low Cost DIP DC/DC Converters Single & Dual OutputDokument4 SeitenTotal Power Int'L: S2A00R Series 3 Watt Low Cost DIP DC/DC Converters Single & Dual OutputsaberNoch keine Bewertungen
- Heat Balance in Fusion WeldingDokument4 SeitenHeat Balance in Fusion WeldingjohanNoch keine Bewertungen
- Coal Analysis For vtps-500MWDokument90 SeitenCoal Analysis For vtps-500MWJagadeesh NetiNoch keine Bewertungen