Das könnte Ihnen auch gefallen
- Electric MotorsDokument13 SeitenElectric MotorsCholan PillaiNoch keine Bewertungen
- Motor Driver Selection For CompressorsDokument13 SeitenMotor Driver Selection For CompressorsMuhammad ImranNoch keine Bewertungen
- Mould Trial ReportDokument5 SeitenMould Trial ReportSUBODHH0% (1)
- Electric Motor Control: DC, AC, and BLDC MotorsVon EverandElectric Motor Control: DC, AC, and BLDC MotorsBewertung: 4.5 von 5 Sternen4.5/5 (19)
- 11 - Electrical System PDFDokument31 Seiten11 - Electrical System PDFTanaji ShindeNoch keine Bewertungen
- Motors and DrivesDokument27 SeitenMotors and DrivessifuszNoch keine Bewertungen
- Electric Motors: Syllabus Electric Motors: Types, Losses in Induction Motors, Motor Efficiency, Factors AffectingDokument12 SeitenElectric Motors: Syllabus Electric Motors: Types, Losses in Induction Motors, Motor Efficiency, Factors AffectingAjay kunwar singhNoch keine Bewertungen
- Starting Solutions: Solid-State Controllers vs. Electromechanical StartersDokument10 SeitenStarting Solutions: Solid-State Controllers vs. Electromechanical StartersDavid PovedaNoch keine Bewertungen
- DC Motors InformationDokument9 SeitenDC Motors InformationCarlosNoch keine Bewertungen
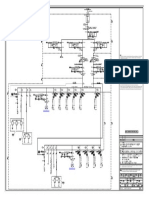
- Electrical SLDDokument1 SeiteElectrical SLDsusovan bIswasNoch keine Bewertungen
- Electrical Motor Products: International Energy-Efficiency Standards and Testing MethodsVon EverandElectrical Motor Products: International Energy-Efficiency Standards and Testing MethodsNoch keine Bewertungen
- Three Phase LocomotiveDokument138 SeitenThree Phase LocomotiveManas Moharana67% (3)
- 08a Motor StartingDokument36 Seiten08a Motor StartingAhmed Abd El WahabNoch keine Bewertungen
- Hybrid Vehicle ReportDokument17 SeitenHybrid Vehicle ReportMidhun S Jacob100% (1)
- Sheet Metal DesignDokument33 SeitenSheet Metal DesignNanda Sagar100% (3)
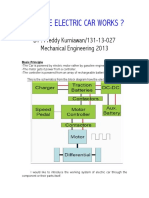
- How The Electric Car WorksDokument6 SeitenHow The Electric Car WorksFreddy KurniawanNoch keine Bewertungen
- Electrical Motor 2Dokument74 SeitenElectrical Motor 2abdulkadhir100% (1)
- 04493430Dokument7 Seiten04493430Krishna KarthikNoch keine Bewertungen
- AC Motors, Motor Control and Motor ProtectionDokument25 SeitenAC Motors, Motor Control and Motor Protectionwira eka0% (1)
- Torque Speed Curve of Induction MotorDokument5 SeitenTorque Speed Curve of Induction MotorShri KulkarniNoch keine Bewertungen
- Design of Switched Reluctance Motor For Three Wheeler Electric VehicleDokument4 SeitenDesign of Switched Reluctance Motor For Three Wheeler Electric VehicleidescitationNoch keine Bewertungen
- Free-Body DiagramsDokument20 SeitenFree-Body Diagramssatish448100% (1)
- PDF Modul 9 Bahan Belajar Sekolah Dasar Mata Kuliah Perspektif Pendidikan SD Pdgk4104Dokument93 SeitenPDF Modul 9 Bahan Belajar Sekolah Dasar Mata Kuliah Perspektif Pendidikan SD Pdgk4104Miftakhul NikmahNoch keine Bewertungen
- Heat ExchangersBasics Design ApplicationsDokument598 SeitenHeat ExchangersBasics Design ApplicationsPujara Manish100% (3)
- Hydro Turbine Vibration MonitoringDokument8 SeitenHydro Turbine Vibration MonitoringreddyloginNoch keine Bewertungen
- The Motor GuideDokument135 SeitenThe Motor Guidegraduadoesime100% (2)
- PMSM Modelling Using MATLABDokument87 SeitenPMSM Modelling Using MATLABMd QutubuddinNoch keine Bewertungen
- IEEE - Design and Construction of Electric MinibusDokument6 SeitenIEEE - Design and Construction of Electric MinibusAhmet Apak100% (1)
- Netzsch Pumpen & Systeme GMBH: OfferDokument6 SeitenNetzsch Pumpen & Systeme GMBH: OfferBilel MarkosNoch keine Bewertungen
- º - The Key Is Inserted Into The Keyway and Pressure-Fit Snugly To Mechanically Connect TheDokument17 Seitenº - The Key Is Inserted Into The Keyway and Pressure-Fit Snugly To Mechanically Connect TheVijay KumarNoch keine Bewertungen
- Regenerative Braking of Series-Wound Brushed DC Electric Motors For Electric VehiclesDokument6 SeitenRegenerative Braking of Series-Wound Brushed DC Electric Motors For Electric Vehiclesbeastlt12Noch keine Bewertungen
- Aman Powertrainev ElectricalDokument12 SeitenAman Powertrainev Electricalsebecay203Noch keine Bewertungen
- Of Induction Motor Using Artificial Neural Network and Implementation in MATLABDokument54 SeitenOf Induction Motor Using Artificial Neural Network and Implementation in MATLABnareshreddy136100% (1)
- ThreephaseTechnology 291010Dokument138 SeitenThreephaseTechnology 291010Naga SahityaNoch keine Bewertungen
- C1201042329 PDFDokument7 SeitenC1201042329 PDFJOHN MINKHANTNoch keine Bewertungen
- Modeling and Simulation of Three Phase Induction Machine Using Written Pole TechnologyDokument7 SeitenModeling and Simulation of Three Phase Induction Machine Using Written Pole TechnologyJOHN MINKHANTNoch keine Bewertungen
- Ecce2012 2 RaleighDokument8 SeitenEcce2012 2 RaleighGeorge CălinNoch keine Bewertungen
- 13 EbikeDokument7 Seiten13 EbikeVignesh SenthilNoch keine Bewertungen
- A Very High Speed Switchedreluctance Startergenerator For AircraDokument7 SeitenA Very High Speed Switchedreluctance Startergenerator For AircraAimmadNoch keine Bewertungen
- LCIs and Syn Motors Applied To Roller Mills - Zayechek - 2000Dokument10 SeitenLCIs and Syn Motors Applied To Roller Mills - Zayechek - 2000Parameswararao BillaNoch keine Bewertungen
- IE3-IE4 Motors - Selecting The Right Control and Protection Components - EE PublishersDokument8 SeitenIE3-IE4 Motors - Selecting The Right Control and Protection Components - EE PublishersTruong HungNoch keine Bewertungen
- Integrated Starter Generator For 42 VDokument10 SeitenIntegrated Starter Generator For 42 Vchuku7Noch keine Bewertungen
- Chapter 3.10: Energy Efficient Technologies in Electrical SystemsDokument8 SeitenChapter 3.10: Energy Efficient Technologies in Electrical SystemsdineshvhavalNoch keine Bewertungen
- Axlr8R Formula Racing: E-Mail - Mobile. No. - 7503744381 E-Mail - Mobile. No. - 8587870908Dokument49 SeitenAxlr8R Formula Racing: E-Mail - Mobile. No. - 7503744381 E-Mail - Mobile. No. - 8587870908mavrick_senNoch keine Bewertungen
- Solid State Drives & StartersDokument18 SeitenSolid State Drives & StartersFlo MircaNoch keine Bewertungen
- Ahorro de EnergiaDokument4 SeitenAhorro de Energiaclide_050793Noch keine Bewertungen
- Hybrid-Electric Turbocharger and High-Speed Sic Variable-Frequency Drive Using Sensorless Control AlgorithmDokument24 SeitenHybrid-Electric Turbocharger and High-Speed Sic Variable-Frequency Drive Using Sensorless Control AlgorithmJosephNoch keine Bewertungen
- A Novel Electrical Continuously Variable Transmission System and Its Numerical ModelDokument2 SeitenA Novel Electrical Continuously Variable Transmission System and Its Numerical Modeljin1004Noch keine Bewertungen
- Lab Rep 2Dokument5 SeitenLab Rep 2Kent Orriele FadriquelNoch keine Bewertungen
- Lecture 3Dokument33 SeitenLecture 3Heleana Faye BundocNoch keine Bewertungen
- Mathematical Modeling of The Electric Drive Train of The Sports CarDokument10 SeitenMathematical Modeling of The Electric Drive Train of The Sports CarJuraj MadarásNoch keine Bewertungen
- MotorDokument15 SeitenMotorersanjeeb_456Noch keine Bewertungen
- Electric DrivesDokument35 SeitenElectric Drivesbabli.panchal1984Noch keine Bewertungen
- Lecture-9: Load Equalization and Two Mark QuestionsDokument6 SeitenLecture-9: Load Equalization and Two Mark QuestionsTimoNoch keine Bewertungen
- AJITIIIIIIIDokument20 SeitenAJITIIIIIIIValin paruNoch keine Bewertungen
- BLDC 1Dokument9 SeitenBLDC 1vishiwizardNoch keine Bewertungen
- SINGLE-PHASE INDUCTION MOTORS (Electric Motor) PDFDokument13 SeitenSINGLE-PHASE INDUCTION MOTORS (Electric Motor) PDFMomanddad la Lng100% (2)
- Hong Jiang, Zhang De-Wang, Wang Guang-Pin, Sui NiDokument10 SeitenHong Jiang, Zhang De-Wang, Wang Guang-Pin, Sui Niabdallah hosinNoch keine Bewertungen
- EE1351 Solid State DrivesDokument25 SeitenEE1351 Solid State DrivesGaurav KumarNoch keine Bewertungen
- Nema Design Code For MotorsDokument8 SeitenNema Design Code For MotorsMani KumarNoch keine Bewertungen
- Summer Training Diesel Locomotive WorksDokument27 SeitenSummer Training Diesel Locomotive WorksPankaj Sahu100% (2)
- Final ReportDokument59 SeitenFinal ReportAzeez SharieffNoch keine Bewertungen
- Lab Rep 2qweqretetDokument7 SeitenLab Rep 2qweqretetKent Orriele FadriquelNoch keine Bewertungen
- Is - 12615 - 2011Dokument12 SeitenIs - 12615 - 2011Sangita Ghaisas100% (1)
- Brushless DC Motor2Dokument2 SeitenBrushless DC Motor2Firhan Ahmad RubiNoch keine Bewertungen
- Summer Training Report DLW VaranasiDokument84 SeitenSummer Training Report DLW VaranasiHemant MeenaNoch keine Bewertungen
- EEE259 ELECTRICAL - DRIVES - AND - CONTROLS QB and AnswerDokument20 SeitenEEE259 ELECTRICAL - DRIVES - AND - CONTROLS QB and AnswerMuniyasamyNoch keine Bewertungen
- Analysis of A Large Power PMSM Using Different Control MethodsDokument6 SeitenAnalysis of A Large Power PMSM Using Different Control Methodspixelo09Noch keine Bewertungen
- PMSM - Dobro2Dokument29 SeitenPMSM - Dobro2Marko_DelNoch keine Bewertungen
- Bidirectional DC-DCDokument9 SeitenBidirectional DC-DCpixelo09Noch keine Bewertungen
- PMSM Electric VehicleDokument95 SeitenPMSM Electric VehicleHuynh Thanh AnhNoch keine Bewertungen
- High-Speed PMSMDokument16 SeitenHigh-Speed PMSMpixelo09Noch keine Bewertungen
- Chapter 3 FlywheelDokument14 SeitenChapter 3 Flywheelpixelo09Noch keine Bewertungen
- A New Control Technique FDokument8 SeitenA New Control Technique Fpixelo09Noch keine Bewertungen
- LQG-LQR Controller DesignDokument37 SeitenLQG-LQR Controller Designapi-3698538100% (2)
- PI and PID Controller Tuning Rules - An OverviewDokument7 SeitenPI and PID Controller Tuning Rules - An OverviewRobert VillavicencioNoch keine Bewertungen
- Chapter 3 FlywheelDokument14 SeitenChapter 3 Flywheelpixelo09Noch keine Bewertungen
- Outer RotorDokument4 SeitenOuter Rotorpixelo09Noch keine Bewertungen
- PWM RectifiersDokument4 SeitenPWM Rectifierspixelo09Noch keine Bewertungen
- Analysis of Surface Permanent Magnet Machines With Fractional-Slot Concentrated WindingsDokument10 SeitenAnalysis of Surface Permanent Magnet Machines With Fractional-Slot Concentrated Windingspixelo09Noch keine Bewertungen
- Input AC Voltage Sensorless Control Scheme For A Three-Phase PWM Rectifier in Wind Power Generation SystemDokument5 SeitenInput AC Voltage Sensorless Control Scheme For A Three-Phase PWM Rectifier in Wind Power Generation Systempixelo09Noch keine Bewertungen
- PWM RectifiersDokument4 SeitenPWM Rectifierspixelo09Noch keine Bewertungen
- PIDtutorialDokument13 SeitenPIDtutorialalijnubyNoch keine Bewertungen
- DC To DC ConversionDokument8 SeitenDC To DC ConversionMichael-Denis NeculaNoch keine Bewertungen
- Fractional-Slot Surface Mounted PM Motors With Concentrated Windings For Hev Traction DrivesDokument43 SeitenFractional-Slot Surface Mounted PM Motors With Concentrated Windings For Hev Traction Drivespixelo09Noch keine Bewertungen
- SPEED PresentationDokument22 SeitenSPEED Presentationpixelo09100% (1)
- Issues With Low Speed Direct-Drive PMGDokument6 SeitenIssues With Low Speed Direct-Drive PMGpixelo09Noch keine Bewertungen
- Advantages of Heavy-Duty MAG WeldingDokument9 SeitenAdvantages of Heavy-Duty MAG WeldingNaksalitNoch keine Bewertungen
- Mooney M20 100hour PDFDokument2 SeitenMooney M20 100hour PDFsplyn100% (1)
- Datasheet SMA05 Ha7212 enDokument18 SeitenDatasheet SMA05 Ha7212 enTom JotNoch keine Bewertungen
- Armi Truck Parts MercedesDokument294 SeitenArmi Truck Parts MercedesArmi Otomotiv Truck PartsNoch keine Bewertungen
- MAK 2005 EnglDokument16 SeitenMAK 2005 EnglJorge Luis Reyes CarmeloNoch keine Bewertungen
- Wsat-Xee: Installation Use and Maintenance ManualDokument68 SeitenWsat-Xee: Installation Use and Maintenance ManualAncuta CosmanNoch keine Bewertungen
- Application Center TelehandlersDokument12 SeitenApplication Center TelehandlersQXNNoch keine Bewertungen
- Hose Ends - Field AttachableDokument64 SeitenHose Ends - Field AttachableSasan AbbasiNoch keine Bewertungen
- Pantera1100 o 4Dokument3 SeitenPantera1100 o 4Emad Abu SafeihNoch keine Bewertungen
- Replacement Parts List: Indoor Air Handler (B5, GB5) SeriesDokument12 SeitenReplacement Parts List: Indoor Air Handler (B5, GB5) SeriesAlvaro GarciaNoch keine Bewertungen
- Diesel Generator Sets: Standard FeaturesDokument5 SeitenDiesel Generator Sets: Standard FeaturesHany FataNoch keine Bewertungen
- Bucket ElevatorDokument18 SeitenBucket Elevatorlhmamda ismailNoch keine Bewertungen
- Hermetic Pumpen Kaelte e 11 2014Dokument28 SeitenHermetic Pumpen Kaelte e 11 2014goodspeed_phNoch keine Bewertungen
- Company ProfileDokument10 SeitenCompany Profilemajid aliNoch keine Bewertungen
- JNR 90 - Diagrama de QuadroDokument21 SeitenJNR 90 - Diagrama de QuadroDuarte Homem de FigueiredoNoch keine Bewertungen
- Maintenance Practices - IIDokument27 SeitenMaintenance Practices - IIrashmiameNoch keine Bewertungen
- Leak Test Report. 1Dokument3 SeitenLeak Test Report. 1Hanuman RaoNoch keine Bewertungen
- Introduction To Aircraft DesignDokument20 SeitenIntroduction To Aircraft DesignAnush R AminNoch keine Bewertungen
- Engine Motorcycle Parts Diagram - Google Search-1 PDFDokument1 SeiteEngine Motorcycle Parts Diagram - Google Search-1 PDFAlejandro ReyesNoch keine Bewertungen
- QYJ1000 Chocolate ConcheDokument9 SeitenQYJ1000 Chocolate ConcheMajikates Service MaintenanceNoch keine Bewertungen
- P88 1 (Completo) PDFDokument4 SeitenP88 1 (Completo) PDFMercedez Benz100% (1)
- Omm D8RDokument4 SeitenOmm D8RRudi Abu ZahraNoch keine Bewertungen