Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Chemical Engineering Gate-2017Dokument48 SeitenChemical Engineering Gate-2017Anhsirk IrsNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Calculus PDFDokument96 SeitenCalculus PDFdhruv pramanik0% (1)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Wear of Cathode in Abrasive Electrochemical Grinding of Hardly Machined MaterialsDokument5 SeitenWear of Cathode in Abrasive Electrochemical Grinding of Hardly Machined MaterialsAnhsirk IrsNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- GATE 2014 Syllabus Chemical Engineering CH - Careers360 PDFDokument2 SeitenGATE 2014 Syllabus Chemical Engineering CH - Careers360 PDFAnhsirk IrsNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
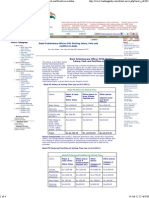
- Bank Probationary Officer (PO) Starting Salary, Perk and Facilities in IndiaDokument4 SeitenBank Probationary Officer (PO) Starting Salary, Perk and Facilities in IndiaAnhsirk IrsNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Introduction To Numerical Methods in Chemical Engineering - P. AhujaDokument99 SeitenIntroduction To Numerical Methods in Chemical Engineering - P. AhujaAnkit Kumar100% (2)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Ibps Bank Po Exam 2013 - Ga - SupplementDokument175 SeitenIbps Bank Po Exam 2013 - Ga - SupplementdevarameshNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- List of Engineering Colleges in KeralaDokument7 SeitenList of Engineering Colleges in KeralapoisonedstarNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Aspen PlusDokument140 SeitenAspen PlusTayeb SherifNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- Revised Unit Process and Unit OperationDokument31 SeitenRevised Unit Process and Unit OperationdeepikabhattacharjeeNoch keine Bewertungen
- Sedimentation Studies Apparatus (Ebe-106)Dokument12 SeitenSedimentation Studies Apparatus (Ebe-106)Anhsirk IrsNoch keine Bewertungen
- Vinayaka Pooja KathanewDokument18 SeitenVinayaka Pooja KathanewAnhsirk IrsNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Lecture Notes 00Dokument11 SeitenLecture Notes 00raghurmiNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Siemens Measuring CyclesDokument276 SeitenSiemens Measuring Cyclesbisquit69Noch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Midas Rex MR8 Product CatalogDokument32 SeitenMidas Rex MR8 Product CatalogSidharth KishoreNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Help - Vortex MachiningDokument2 SeitenHelp - Vortex MachiningBojan RadovanovicNoch keine Bewertungen
- Abrasive Water Jet MachiningDokument12 SeitenAbrasive Water Jet MachiningAbhimanyuPradhanNoch keine Bewertungen
- Catalago Final OsteoamericaDokument62 SeitenCatalago Final OsteoamericaMaritza ArroyoNoch keine Bewertungen
- Typical Analysis: OrangeDokument2 SeitenTypical Analysis: Orange146235Noch keine Bewertungen
- 15.2 Thread StandardsDokument3 Seiten15.2 Thread Standardssathish69Noch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Metalock Brochure May2013Dokument32 SeitenMetalock Brochure May2013mjezeracNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- Evaluation of Carbide Grades and A New Cu!Pi'Ing Geometry For Machining Titanium AlloysDokument11 SeitenEvaluation of Carbide Grades and A New Cu!Pi'Ing Geometry For Machining Titanium AlloysBharat HPNoch keine Bewertungen
- FeatureCAM 2015 Reference HelpDokument1.985 SeitenFeatureCAM 2015 Reference Helpsuperalitos100% (1)
- V34 Top New FeaturesDokument2 SeitenV34 Top New FeaturesMatheus ArrudaNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Material Removal Process (Metal Machining Process) : Theory of Metal CuttingDokument129 SeitenMaterial Removal Process (Metal Machining Process) : Theory of Metal CuttingIjanSahrudinNoch keine Bewertungen
- VT1150Dokument14 SeitenVT1150camb2270Noch keine Bewertungen
- Cutting Speed OptimizationDokument14 SeitenCutting Speed OptimizationCharles OndiekiNoch keine Bewertungen
- Mitsubishi M700 HandbookDokument437 SeitenMitsubishi M700 HandbookibjwNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Machine Shop Theory Technical Report FinalsDokument7 SeitenMachine Shop Theory Technical Report FinalsAlexis CarpenaNoch keine Bewertungen
- CNC Machine Manufacturer by CountryDokument3 SeitenCNC Machine Manufacturer by CountryTemmy Candra WijayaNoch keine Bewertungen
- A694 F65 Product Datasheet DACooper Sons - 230621 - 110007Dokument1 SeiteA694 F65 Product Datasheet DACooper Sons - 230621 - 110007gawaNoch keine Bewertungen
- ResearchProjectsBurrFormationandDeburring 0304 TECH2Dokument127 SeitenResearchProjectsBurrFormationandDeburring 0304 TECH2Bebzy MuetzNoch keine Bewertungen
- Shop Exercise 5Dokument7 SeitenShop Exercise 5marisonNoch keine Bewertungen
- ME6402 Manufacturing Technology II NotesDokument124 SeitenME6402 Manufacturing Technology II NotesMr.N.S. NateshNoch keine Bewertungen
- COURSE OUTLINE, Mastercam 2024 Mill 2D Advanced User TrainingDokument3 SeitenCOURSE OUTLINE, Mastercam 2024 Mill 2D Advanced User TrainingdeixemlaverNoch keine Bewertungen
- Thread Height Gage Standards and Contact PointsDokument1 SeiteThread Height Gage Standards and Contact PointsCarlos Enrique Guzman CastellonNoch keine Bewertungen
- Electric Discharge MachiningDokument3 SeitenElectric Discharge MachiningVrushiket PatilNoch keine Bewertungen
- Production Process.II (CBCGS) Module.1 Metal CuttingDokument24 SeitenProduction Process.II (CBCGS) Module.1 Metal CuttingOmkar BedadeNoch keine Bewertungen
- 1.CNC Controllers and Its Related Parameter A ReviewDokument6 Seiten1.CNC Controllers and Its Related Parameter A ReviewOmer RizvicNoch keine Bewertungen
- CNC Program VerificationDokument3 SeitenCNC Program VerificationRajendra Kumar YadavNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Jigs and Fixture Sem III FinalDokument127 SeitenJigs and Fixture Sem III Finalnikhil sidNoch keine Bewertungen
- 2230 SwissTypeCollets Bushings 2023Dokument20 Seiten2230 SwissTypeCollets Bushings 2023Waseem AnwarNoch keine Bewertungen
- Fixture Could Be Used To Hold Workpiece To WorktableDokument6 SeitenFixture Could Be Used To Hold Workpiece To WorktableM Shahrul IzuanNoch keine Bewertungen
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionVon EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionBewertung: 4.5 von 5 Sternen4.5/5 (542)