Beruflich Dokumente
Kultur Dokumente
Cap 01
Hochgeladen von
Elmer ValentinOriginaltitel
Copyright
Verfügbare Formate
Dieses Dokument teilen
Dokument teilen oder einbetten
Stufen Sie dieses Dokument als nützlich ein?
Sind diese Inhalte unangemessen?
Dieses Dokument meldenCopyright:
Verfügbare Formate
Cap 01
Hochgeladen von
Elmer ValentinCopyright:
Verfügbare Formate
., .- - .
,
. - -
.: ;.:,~~ ..:.
- ,." .... ~--
Department of Civil Engineering
Acu( UJ(i,'u;iy
-~-
... 1::1' ' ..:.:. ::'::.::-,-: ~t '.>::~ o~ -
JOSEPH W.TEDESCO
c. ALLEN ROSS
Deputment o[ Ci'/i1 Engin~ering
Orego!! 5!t1!~ UJ(i,'~r5iiy
WILLlAM G. McDOUGAL
/ ... '~ '--
Graduate Engineering Research Center
Ur.:r.:~r5ity 01 Florida
BISl.IOrtC-\
I ;'-' G E" i ~ ., 1 "
y\ A!JOISON-WESLEY
----
Ao,j;npriilt off Add;son Wesley Longman, ne.
THEORY AND APPLICATIONS
.A.
-,
~,k:':!0?~;~,. CJliror.:;:l . ~~::~:!:.!:;. ~\b$S3Chu~e({s ~ H3:!OW. En~bnd
Bcrk~l~y. C~di;u~i~l ~ Den ~,;!Is. G:~r~~:-io~ :Syd,lCY'~ 80:1n ~.~\m.";~:::-::':J::: T.;~~:'0. .\k',il..l~l;:.'
STRUCTURAL
DVNAMICS
11. Ross, C.
98-28805
CIP
Senior AcquisltionsEdi[Or: Michael Slaughti.~
Associate EdilOr: SUS2.nSJater
Production Manager: Panie Myers
Senior Production Edior: Teri Hyde
?rl and Design Supen'isor: Kevin Berry
Ccmposition: Lachina Publishing Services
mustrations: Sciemific Illustrators
Cover Design: Juan Vargas
Cover Image: Joseph W. Tedesco
Text Design: R. Kharibian & Associates
Text Primer and Binder: Worl Color Book Services
Cover Printer: Phoenix Color Corp.
Copyright 1999 Addison Wesky Longman, Inc.
A11 rights resen'ed. No pan of this publicarion mal' be reproduced, or stored in a database or
relrieval system. or transmitted, in any form or by any means; electronic. mechanicaJ, pho[Ocopy-
ing, recording. or othenvise, withoUI the prior written permission of the publisher. Printed in he
United S'ta'tes of America. Printed simultaneously in Canada.
Many of he design:ions used by manufacturers and sellers to disinguish their products are
claimed as r:1dem;rKs. Where hose designations appear in this booK. and Addison- Wes1ey was
aware of:1 tradem;:rk caim. he designations h:1\'e been primed in initial caps or in all caps.
Library of Congress Cataloging-in-P;blication Data
Tedesco, Joseph \J.,'.
Structur3.1 d)'3.mics : theor)' and applications / Joseph W. Tedesco.
William G. McDougal. C. Allen Ross.
p. CI11.
Incl~des bibJiographical references and index.
ISBN 0-673-98052-9
l. SL'"\Jcrurald)'namics. 1. McDougal, Williar"
Allen. lTI. Title.
TA654.T43 1998
624. 1'7--dc2 I
Instructional Materia] Disclaimer
The programs presented in chis book have been included for their insrucional value. They have
been tested with car butare not guaranteed for any particular purpose. Neither the publisher or
the auhors offer an)' waITanties or representarions, nor do the)' accept ,,11)' liabilities with respecl
[Olhe programs.
The full complemen of supplemental teachiHg-inaterials is availabJe:(O qualified instructors.
ISBN 0-673-98052-9
1 2 3 4 5 6 7 8 9 10--RJ~-r--02 01 00 99 98
Addison Wesley Longman, Inc.
2725 Sand Hi!1 Road
Menlo Park. C:Jifomia 94025
78
105
140
172
Response to Periodic and Arbitrary Dynamic Excitatian
6.1 Response to Periodic Excitarion 140
6.2 Response to Unit Impulse 148
6.3 Duhamel Integral 150
6.4 Response lO ArbirIarj Dynamic Excitaton 151
6.5 Response Spectrum 162
References 166
Notation 167
Problems 167
Notaton 204
Ch2pter 4 Damped Free Vibration
4.1 Free Vibr:J.[ion with Viscous Damping 78
4.2 Loga.rithmic Decrement 86
4.3 Hysteresis Damping 91
4.4 Coulomb Damping 96
References 100
Notation 100
Problems 101
Chapter 5 Response to Harmoni Excitation
5.l Forced Harmonic Response of Undamped Sys[en~s 105
5.2 Beating and Resonance 110
5.3 Forced Harmonic Yibrations \vith Viscous Dampi:lg 116
S.4 Effect of D:J.mping Factor on Steady-State Respo;se
and Phase Angle 121
5.5 Harmoruc Excitation Caused by Rotating Unbalai1ce 125
5.6 <Base Excitalion j28
5.7 Vibration Isolation and Transmissibility 131
Rercrences 135
Notation 135
Problems 136
Ch3Dter 6
':;:SDt.2f 7 Numerical Evaluation af Dynamic Response
7.1 Interpolation of the Excitation 172
7.2 Drect Integration of the Equation of Motion 177
7.3 Central Difference Method 177
7.4 Runge-Kutta Methods 183
7.S Average Acceleration Method 189
7.6 Linear Accderation Method 194
7.7 Response (O Base Excitation 198
7.S Response Spectra by Numerical Integration 202
References 204
-
1, .,
Equation 00','10tion and Natural Frequency
2.1 Fundamental Compcnents of a Vibraling Syslem /5
2.2 D' Alembert's PrincipJe of Dynamic Equilibrium /6
2.3 The Energy Method 2/
2.4 The Princip!e of Virtual Displacements 24
References 40
Notation 40
ProbJems 40
Preface
..... ~: .. -"
Chapter 2
Chapter 3 Undamped Fr~bration
3 ] Simple H:::~~C1nic MOllar. 45
3.2 Interprela:ion of lhe Soiution 50
3.3 Equivalent S~iffness 56
3.4 Rayleigh ~v1ethod 66
References 7/
Not:ltion 72
Problems 72
Chapter 1 Basic Concepts
1.1 l!1troduclion LO Structur::1 Dynamics 1
].2 Types of Dynamic Loads 2
1.3 Sources of Dyn:\mic Loads 2
lA Distinguishing Features of a Dynamic Problem 4
].5 MethoGology for Dynamic Analysis 5
16 Types of Structural Vibration 9
].7 Org:\n iZ~Hion of lhe Texl / O
1.8 Syslems of Unils 12
References 12
PART I single-Degree-of-Freedom (SDOF) systems
contents
Contents V
Chapter 11 Numerical Solutian Methads far Natural Frequencies and lv'!ade Shapes 327
11.1 General Solution MeCDods for Eigenproblems 327
11.2 Inverse Vec[or Iera(ion 329
ll.3 Forward 'lector Tteration 339
llA Generalized Jaeobi Method 344
11.5 Solucion Methods for Large Eigenproblems 352
Refaences 353
N'otacion 353
Prlhkms 35-/
Chapter 8 Frequeocy Dornaio ,A.nalysis
S.l Altemilllve Forms of the Fourier Series 207
8.2 Diserete Fourier Transt"orm 214
8.3 Fast Fourier Transform 217
SA Discrete Fourier Transform ImplementationConsiderations 223
8.5 Fourer Integral 229
References 232
Notaton 232
Problems 233
PART I1 Multi-Degree-of-Freedom (MDOFl systems
Chapter 9 General Propeny Matrices far Voracing Systems
9.1 Fle"bility Matri" 237
9.2 Stlffness Matri" 2:.13
9.3 Iner!a Propenies: :VIass iv"Luri, 252
9.4 The Egenproblem in VibrJ.tion .'\rdysls 255
95 Sta[lC Condensaron of [he StitTness Ma[rix 2f
References 271
Notation 271
Problems 272
Chapter 10 Equations of Mo(ian and Undamped Free Yibratian
10.1 Hami!(on' sPrinciple and (he Llgnnge Equ:.Hions 279
10.2 Natural Vibration Frequeneies 288'
10.3 Natural Vibration J'v[odes 290
lOA Onhogonaity of Natural Modes 29
lOS Systems Admitting Rgid-Body '\10des 297
10.6 Generalized Mass and Stiffness ?v[atriCeS~'04
10.7 Free Vibra(on Response to Inial Condition 308
10.8 Approximae Methods for Esimating he ndamen(al Frequeney 314
Referenees 32 1
Notaton 321
Problems 322
207
278
":;;;
vi .. Contents
Chapter 12 Analysis of Dynamic Response by Mode Superposition
12.1 Mode Displacement Method for Undamped Systems 357
]2.2 . Modaj-Partic'ipation Factor- 366" - . <. - '' ..--'------' ,--
12.3 Mode Superposition Solutan for Systerns with Classical Damping
]2.4 Numerical Evaluatian of Modal Response 373
12.5 Nomlal Mode Response to Support Motions 378
12.6 Response Spectrum Analysis 384
12.7 Mode Acceleration Method 386
References 39 J
Notaton 392
Problems 393
357
369
PARTJII continuous Systems
Chapter 13 Analysis of Dynamic Response by Direct Integraton
13.1 Basic Concepts of Direct Integraton :1\1ethods. 398
13.2 The Centra] Difference Method 399
13.3 The \Vlson-8 Method 407
l3.4 ,-The Newmark Method 4J7
13.5 Practical Considerations fbr Damping 420
l3.6 Stabiliry and Accuracy of Direct Integrarion l\1ethods 427
13.7 Direc Integration Versus Mode Superposiriol 428
References 429
l'otarion 430
Problerns 43 J
437
398
-435
460
Vibrations o Continuous Sysrems
14.1 Longrudina1 Vibration of a Uniform Rod 438
]4.2 Trans\'erse Vbration of a Pretensioned Cable :in
14.3 Free Transverse Vibration of Uniform Beams 445
]4.4 OrthogonaJity of Normal Modes ~
] 4.5 Undarnped Forced Vibration of Beams by Modc .Superposition
]4.6 AppOx.imate Methods 467
References 488
Notaton 488
Problems 489
Chapter 14
PART IV Nonlinear. Dynamic Response
495
Chapter 15 Analysis of Nonlinear Response
15.1 Classification ofNonlinear Analyses 498
l5.2 Systems With Nonlinear Characterislics 503
] 5.3 Formu13tiol1 of ncremental Equations of Ec;uilibrium 505
497
Appendix A 797
Appendix B 799
Index 801
Chapter 20 Basic Concepts of Wind Waves
20.1 Line:lrWaveTheory 710
20.2 Nonlinear Waves 719
20.3 Wa\'e Transformations 722
20A Wa\'e Statlstics 730
205 Waveinformation Damping 741
References 718
NOlation 749
Problems 750
710
752
701
Notatons 708
Blast Loads on Structures 682
19.1 Sources of 8last Loads 682
19.2 . -Shock Waves 683
19.3 Determinaton of 81ast Loads 689
19A Strain-Rate Effects 695
19.5 Approxmate So!ution Technque for SDOf Systems
References 706
Problems 707
Chapter 21 Response of Structures to Waves
21.1 i\'lorison Equation 753
21.2 force Coefficients 760
21.3 Linearized lv!orison Equation 768
21.4 nclined Cylinders 772
21.5 Transverse Lift forces 776
21.6 froude-Krylov Theory 778
21.7 Diffraction Theory: The Scattering Problem
2] .S Dffraction Theory: The Radiation Problem
References 794
Notaton 794
Problems. 795
Chapter 19
Contencs
Contents Al.. vi!
15.4 Numerical Solution of Nonlinear Equilibrium Equations
15.5 Response of Elastoplastic SDOF Systems 517
15.6 Response of Elastoplastic MDOF Systems 532
References 544
Notation-- --544
POblems 546
508
PART V Practical Applications
Chapter 16 Elastic Wave Propagation in Solids
16.1 Stress and Strain at a Poinr 552
16.2 Constjtutive Relations 555
16.3 Equations of Motion 563
16.4 Stress Wave Propagation 563
16.5 Applications 571
References582
Notation 582
Problems 583
Chapter 17 Eaf"lhquakes and Earthquake Ground Moron
17.1 Causes of Earthquakes 584
17.2 Faults 586
17.3 Seismic Waves 587
17.4 Earthquake Intensity 589
17.5 Earthquake Magnitude 592
17.6 Seismicity 594
17.7 Earthquake Ground lvlation 596
17.8 Earrhquake Damage Mechanisms 599
References 599
Notaton 600
53
6C
. ~
Earthquake Response of Srructures
18.1 Time-History Analysis: Basic Concepts 602
18.2 Earthquake Response Spectra 610
18.3 Earthquake Design Spectra 616
18.4 Response of MDOF Systems 632
18.5 Generalized SDOF Systems 648
18.6 In-Building Response Spectrum 660
18.7 Inelastic Response 665
i 8.8 Seismic De-sign Codes 673
References 675
Notaton 676
Problems 678
Chapter 18
preface
-<O
The dynamic analysis of compkx strJCLUreS has experienced impressive progress since
the 1970s. A.mong the reasons for this trend are me advent of digltal computers and the
evelopment of sophisticate numerical analysis tools, particularly he finite element
meho. As technologies in hese areas concinue to advance, pr2.ctical dynamic analyses,
both lloear and non linear, of extremely complicated systems are becoming more com-
monplace. Therefore, it is imperative that engineers familiarize themselves wirh rhese
modem numerical solution technic;ues and heir implememaclon on digital computers.
The motivation for chis boo:<: is to provide engineers with an understanding of the
dynamic response of strueLUres and of the common analysls technlques employed to
evaluate these responses. :\!though he boo~ emphasizes numerieal solution techniques
for a range of applicaions in strl.!ctural ynamics, a comprehensive treJtment of the
c1assica! analytical methods is also inc!uded. Among the specla! topics adresse in he
boof( are the response of struccures LO eanhquake e;<citation, the analysis of blast load-
ing, wave forces on strucLUres, wa'/e propagarion in e[astlc media. and nonlinear
dynamic response. L\loreover, he soluti?n echniques demonstrated throughout the text
are versatik and nat limited LO hese topics. lnd are appropriate for many atha appliea-
ions in civil. mechanieal. and aerospace engineering.
The book contains material for severl[ courses on srructura[ dynamics. The mate-
rial inc!udes a \Vide range of subjects, from very elememary to advanced, arranged in
increasing order of difficuly. To systemaize 'presentarion of the material, the book is
organized into five pam: 1. Single-Degre~-of-Freedom (SDOF). Systems; U. tvlu!ti-
Degree-of-Freedom (MDOF) Systems; III. Concinuous Systems; IV. Nonlinear
Dynamic Response: and V. Practicll Applicaions. The material in Pan Iis suitable for
an elemencary introductory course in strucrural dynamcs at the junior or senior level. A
more comprehensivc course in lntroductory s cructu rOl1 dynamics, taught to ldvanced
seniors and [irsc-year graduate students, can be offered from the material in Pans Iand
~I. An ;dvanced graduate level course in s:ruc:ural ~yna[~ics can include the material
ln Pans IU and IV, and several se!ected tOOlCS rro~an: V. \,
Throughou the book, detailed deri ValOnS and Implement<lt1on of nu~ solu-
tion techniques are presented. [ndeed, many of che end-of-chapter homework prob!ems
require a PC computer solution. Depending on a student' s leve! of sophistlcation, they
mal' wrice heir own computer routines or use commercially available software
packages such as MATLA3, MA THCAD, and MAPLE to solve he problems. As a
convenience, a suite of computer programs written in FORTRAN for a PC that mal'
be employed for the problem solutions are available on the authors' websit at
www.Scructural-Dynamics.com.
This book has been writen to serve not only as textbook for co[lege ;:nd univer-
sity students, but alsa lSl reference boo:": for practicing engineers. The anJlytical for-
mulations Jnd numerical solution techniques presented throughout the book underlle
most computer programs used by engineers in analyzing Jnd designing ~tructures sub-
ject to dynamic loadings.
ix
X Preface
-- =
The contents of this book are the resu]t of teaching courses in structural dynamics
and wave mechanics al Aubum Unversity, Oregon State University and the University
of Florida. The,cQntent,was st~on_~lyinf]uenc~d_b):.?ur research experience. Organiza-
tions' that have supponedour -research' include lhe Air Force Office of Scientific
Research,U.S. Arrny Corps of Engineers Waterways Experimenl Station, Wright Lab-
oratory Arrnament .Directorate, Wright Laboratory Air Base SurvivabiJity Section,
Office of Naval Research, SeaGrant, the Federal Highway Administration, and the Ala-
bama Depanment of Transponation. We are indebed 10 the colleagues with whom we
worked at these organizations.
We are very appreciative 10 the following individuals for their careful reviews of
the manuscript and for their constructive suggestions: Thomas aker, University of
Virginia; James F. DoyJe, Purdue University; Faoud Fanos, Iowa State University;
Winfred A. Foster, Aubum University; Ronald B. Gl1enther, Oregon St<lte University;
Roben T. Hudspeth, Oregon Slate University; Ba..rry.T Rosson, University of
Nebraska; Parthe Sakar, Texas Tech University; Avi SinghaJ, Arizona State University;
Bozidar Stojadinovic, University of Michigan; Tneodore Toridis, George Washington
University; Penny Vann, TexasTech University; A. Neil Wil]iams, UniversilY of
Houston; SoJomon es. Yim, Oregon State Universiry; and Norimi Mitzutani, Nagoya
University. We are also thankful to many former studenlS who assisted in the soIutions
of the in:.text examples and he end-of-chapter homework exercises, especia]]y Mah-
moud EI-Mihilmy, Sanjoy Chakrabony, Prabhakar Marur, Dennis Tow, Johnalhan
Powe]], MolI)' Hughes. Nathan Poner, and Roben Williams.
Joseph W. Tedesco
\Villiam G. McDougal
e A]]en Ross
.--_.-
7 ','ulnb~rs in brJckccs refer lO cnd~of-ch~pcer ref~rcnces.
1.1 l~nRODUCT'ON TO STRUCTURALDYNAMICS
1.5 Mechodology for Dynamic Analysis 5
1.6 Types of Scrucrural Vibration 9
1.7 Organizacion of the Texc 10
1.8 Systems of Unts 12
.~=
Basic concepts
1.1 Introduction (Q Srucrural Dyn;mics 1
1.2 Types of Dynamic Loads 2
1.3 Sources of Dynamic Lo;ds 2
lA Distinguishing FeatLIres of a Dyn3.mic
Probkm 4
This text is concemed wieh the anal/sis of structures subject:d ea dynamic !oads~ In this
context, dynamic means time varying~ That is, the application andJor removal of the
loads neeesso.rily varies with time [1].' Moreover, the response (i.e., resulring defkc-
rions, iotern<ll sereSSeS, ete.). of a structure resisting sueh loads is also time dependen or
dyn<lmic in oJture.
lo realiey, no loads rhar are applied (O a srructure are truly scarie. Since all loads
musr be app!ied to a stnkture in sorr,e particlar seqLienee, a time variarion of rhe force
is inherently invol ved. However, whether or not a load should be considered dynamic
is a relari\e manero The mosr sigoificant paramerer influencing the extent of the
dynamic effect a lod fias upon a structure is' the na((mi period 01 vibmrioll of the
structure, T Brietly stared, the natural period of vibration is the rime required for the
structure to go through one complete cycle oflree vibraron. If rhe applicarion time for
rhe load is lurge compared to the natural period of the structure, then rhere wil! be no
dynamic effect, and the lbad can be considered static. If, 00 t~r hand, the appIlca-
rion time for the loads. in close pro;<irriity to the natural period of the structure, ir wil!
induce a dynamic response.
Situ.ations in which dynamic !oading must be considered are quite numerous.
E,xamples include: rheresponse of bridges to moving vhicles; rhe acron of wind gusts,
Ocean waves, or blast pressures upon a structure; the efrect of landing impact upon air-
craft; rhe erfecr on a building s~ructure whose foundation is subjected to earthquake
excitarion; and the response of structures subjecced to altemating forces caused by
oscillating machinery [2J. Under these types of loading conditions, eiher the entre
structure or cen:ain components or he structure are set in moton (.e., caused to
vibrare). Therefore, ~isnecessary to apply the principies of dynamics rather th:ln those
of statics ro~evaluare the structural response. It wil! be demonsrrated throughout this
text that rhe maximum deflecrions, srresses, strans, and various oher response qu:\nti-
ti eS e,xhibited by a strucrure are generally more severe when loads of a gi ven <lmplitudp
are applied dynamicaJly rarher than starica!!y.
1
Ti:ne
(d)
ti
u
u
u
<
Time
(e)
Time
(b)
(a) simple h:mnonic: (::) periodic, nonharmonic; (e) nonperiodic, shor1 dur:nion: (<5) nonperioc.
_ .--_~co,m_~_ o_.~,. The respon<;e of aSlruclUre.to.Oynamic }oac!s may_b_eocategorized as either delerminislic
" o. _" o _ =. _.._. _._... _~..,.. ' ..... __ .__ "'0 ' o _ ".
or Ilondelerminislic [3]. If lhe magnitude, point of application, and lime variation of the
loading are completely known, lhe loading is said to be prescribed, and the anaJysis of
the structuraJ response lo' this prescribed loading is defined as a delerminislic analysis.
However, if the time varialion and. other characleristics of lhe loading are not com-
pletely known, but can be defined'only in a statistical sense. lhe loading is referred to as
randol1t, and the corresponding analysi~ Qf lhe structural response is termed nondeter-
ministic. This lexl emphasizes the delerminislic response of slructures to prescribed
dynamic Joading.
To expedire lhe dynamic analysis <?.f struclures, ir is convenienl to cJassify dynamic
loads as eirher periodic or l1onperiodic. Periodic loadings repear lhemselves al equal
time inleryals. A single lime inrerval is called the period To. The simplest form of peri
odie loading can be represenled by a si!}e funclion as sho\Vn in Figure 1.1a. This lype of
periodic Joading is referred to as simple hannOllic. Anolher form of periodic ]oad is
i]]ustrated in Figure 1.1b. This loadingis tem1ed periodic, 1/ol1ha171/o/lic. Most periodic
. loads mal' be accurale]y represenledby summing a sufficient number of harmonic
tem1S in a FOllrier series. Any loading that cannOI be characlerized as periodic is non-
periodic. Nonperiodic loads range from short-duralion impulsive types, such as a wind
gusl or a blasr pressure (Figure l.] e), 10 fairly long duralion ]oads, such as an eanh-
quake grourid mOlion (Figure J.] d).
2 A CHAPTER 1 8asic Concepts
1.2 TiPES OF DYNAMIC LOADS
igure 1.1
'ypes of ::::= -':
mg du:-::=-
1.3 SOL:.~:=:= =~'NAMIC LOADS
Sources of dynamic ]oads on srrucrures are many and yaried. However, rhe origin (
of rhe majoriry of significan! dynam.ic loads can be attributed to one of the fonowing
sources: (1) environmental. (2) machi:t1e induced, (3) vehicuJar induced, and (4) blasl
induced. Undoubledly. the single mos! common source of dynamic loads on strlJCtures
is environmental in nature. Some typical examples of environmental1y induced
dynamic ]oads on structures include wind loads, eanhqual:e loads. and wave ]ads.
1,3 Sources of D'namic Loads ... 3
Wind [oads on structures are a Eunetion oE wind veloclty, height oE the structure,
and shape and stiffness eharacteristies of the structure. Aerodynamic forees in the form
of drag and life forees ean be computed from a mean wind ve[oeity reeord similar to
that shown in Figure 1.2. Earthqu<1kes are another environmental phenomenon that can
indL!~ signiucant dyn:lmi~ Joads on struetuTes. Earthquake forees that develop in strue-
tures result from the aeeeleration of the strueture's base by a highly irregubr and eom-
plex earthquake ground mOllon as illustrated in Figure l.ld. In the design of eoastal
and offshore stn.etureS, wave-indueed loads represent the primary design criterion.
Wave forees inellJde components due to drag, inertia, lift, and buoyaney to estimate the
total hydrodynamie Ioads aeting on the structure.
Another signitlcant souree of dynamic loads on struetures, eommonplaee in indus-
tria! installations, is that awibuted to equipment or machinery such as reciproeating
and rotating engines, turbines, and con veyor meehanisms. The nature of maehine-
induced dynJmic loading is usually periodie. Vehieular-indueed vibrations represent
sti[l another source ol' dynamie IOGding, and they ean be eategorized as either internJ.1
or e.'cem::d. A eornrnon example of an exterm.lly indueed vehieular dynJ,mie load is
tnJ.t caused (O a highway bridge from speeding trueks traveling aeross it. Similarly, the
same truek tral'fie ,may induee vibrarions thilt causeeraeks in pIaster and oEher minor
damage to buildings ooted close to he highway. Oftentimes, equipmem 10C::\l:::d
within a vehicle must be isolared from forces generilted by internal vehicular vibration.
For instanee. sensitive navigationJ.1 equiprnent mounled \Vithin aircral't must be isolated
from dynamie t'orces induced by tat.:e-offs and landings or in-night turbulenee.
Another major so:.."ce of dynamic IOilds is atcributecl to bbses, elther from expiosi ve
de, ices or accidencal chemicJ..! e:~plosions. B!J.st-indueed oads on struetures have bee<1a
longtime coneem in the design ot' military installations. In recent years. ho\Velfer. there
has been a heightened awareness withi<1 the ei vilian sector of the suseeptibility of govem-
rnent and instirutional facilities to terroris bombings. Toe dynamie loads indueed to a
scructure from blasts mo.nifest themsel'les primari!y in he l'orm of an overpressure. as
illustrated in Figure [.le, but in some instilnees 'crie loads may instigate significant ground l
shiling, as illustrated in Figure 1.3. The blas overpressure is most deVilStD.ting to strue-
tures in close proxirnity (Q the explosion; however, the ground-shaking component result-
.ing from a large underground detonatlon may affeet struetures many miles a\vay.
li(l)
..
I
I
Figure 1.2
Typical wind velociey record .
~
I
-~l\l\ ---== ==;;i- ..... -..:,lI,Stanctarct
V IV d'liation
..
U .. \kJn vdociry
.I
1.4 DISTINGUISHING FEATURES OF A DYNAMIC PROBLEM (
25 20 15
1me (sec)
lO 5
~
v
5
~
ti
~
O
.~
~
15
5
6
lO
O
A structural dynamics problem differs from. irs sr3tic counterpart in two essenrial
aspects [4). The firsr and mosr obvious difference is rhe rime-vaJ"ying nature of rhe
excitation (appiied loads) and the response (resulting defiections, stresses, etc.). Thar
is, both are functions of time in a structural dynamics problem. This precludes the
existence of a single solurion. The analyst must investigate rhe solution over a specific
inrerval of lme'to fu!ly evaluare the structural response. Thus, a dynamic analysis is
inherently more compu;ariona]]y intensive !han a static analysis.
However, !he most impol1ant feature differenriating a dynamic problem from Ll-e
corresponding static problem is !he occurrence of inem'Q forces when ,he loading is
dynamically appued. Consider the vertical cantilever str1Jcture shown in Figure lA. If a
force F is applied staticalJy at !he tip of the can ti le ver, as illustrated in Figure lAa, rhe
resulting sne2.I force v, bending moment M, and associated stresses and deflecuons in the
str1Jcture can be computed from the basic sta tic srrucrur2.! analysis principIes. and 2fe
directly proporrional to !he force F. If, however, a time-varying force F(t) is applied lO rhe
[ip of !he cantilever, as i]]ustrated in Figure lAb, !he strUcrure is set in mororl, i.e ..
"ibrates and experiences accelerations. Inel1ia forces propol1ional to !he m~s r~e::
develop in Lhe SlIUcture !har resist !hese accelerarions. The signif1cance ofilie contributioi"".
made by inertia forces ro the shear force Ver), bending momenr M(r), and reJated s;:-esses
and deflections in !he strucrure determines whe:her a dynaJ1ljc anJlysis is wa-ra;~ed.
4 CHAPTER 1 Basic Concepts
Figure 1.3
15 I
TypicaJ ground motion
~IO Jecords pr~~ce.d by an : .
.-
underground explosion.
-
5
Blast Vibrariol1 Analysis by
?:
'u
o
G.A. Bollinger, Copyright
.E?'
"
1971. Reprinted by
,.
~
5
permission of Southern
111inoisUniversity Press,
2 lO
o CarbondaJe, IL.
15
lO
l.
!.~
1
M
0-V(I)
M(I)
(b)
F(!)
(a)
1.5 Methodoiogy for Dynamic Anal'lsis .... 5
. Typiea[ of any prob!em in englneering meehanies. an appropriate methodology for
eondue~g a dy.namie- ..s..t.ruecura[ a..l1a[y~is is es~entia. ~ to ac~ieve a viable solurion. O~e l
such metnodo[ogy lss\immanzed !n FIgure L), whlCh dertnes rhret: basle phases or a
dyname analysis: (Uj\ienrifieation of the physieal :>roblem, (2) defwition of the .
meehanieal model, an~ (3) solurion of the meehanieal model.
Phase 1 entailsre;cognition of rhe problem as ir exisrs in nature. This ineludes
accurarely idenrifying aJld deseribing rhe physieal srrueture. or srruetural component.
and the souree of the dyamie loading. Phase 2 requires an interpretation of rhe physi-
cal problem inro a form eonducive to anilabie analysis techniques. This involves
defining a meehanieal ~o.dd thar aeeurarely represents rhe dynamic behavior of the
pnysiea problem in terms of geornerry. k.inemaries, loading. and boundar,! eonditions.
Tne idealization of rhphysieal problem to J meehanical modd eonduei ve ro available
anaiysis techniques generally invol'les some simplifying assumptions, whleh infllJ-
ences the formularion ?[rhe differential equarions goveming he struetural response.
In Phase 3 rhe governihg differenria:I equo.rions are solved tO obto.in rhe dynamic
response. The solutin .s only as aeeuro.te as rhe representarion provided by he
meehaneai modei. Ther~fore, mis step generally requires an assessmerH for aecuracy.
If Lf-epredefined accuraGY crireria are meto rhe mechanicai model has hen been sol ved
Figure 1.4 F
C1ncikver $rfUCWre $ubjected
(() (o.) astaric load; (b) a
~::r1J.mic loado
1.5 METHOOOLOGY FOR OYNAMIC ANAL YS15
' ..
6 CHAPTER 1 Basic Concppts
Refine anaJysis
Desi!,D improvemellts
Struc:uraloprimiz.ation
lmprove rnecbanicaJ modeI:
Ch::Ulge of physical problem
I
T
I
T
lnrerpreL3tion of results
Mechanica1 modeJ govemed
by differentiaJ equ.atioris
Assumptions on:
Geometry
KiDemarics
Material laws
L:Oading.
, Bouodary conditions
Etc.' :.'
SOlUriODof goveming
dierenrial equations
ConriDuous model:
Par..iaJ differenrial equations'
Discrere model:
OrdioaI)' differentiaJ equarions,
LPh)'sicai probkrn
I
T
Figure 1.5
MethodoJogy for COl1duclil1g a dynamic
analysis,
with a salisfaClOi)' level of confidence, and the analysis results can be interpreled in a
meaningful manner. For complex Slructures, il may be necessary lO refine the anaJysis
by considering a more detailed mechanical mode] or to introduce design improvemen~
for structural oprimization, \\'hich leads t'O funher analyses in\'o]\'ng several iterations.
The compJexi[y of the analysis depends largely on [he physical problem under
consideration and on the mechanical rriode] that must be employed to obtain a suffi-
ciemly accurate response prediction. A linear analysis can be a routine task, although a
funy three-dimensonal solurion may require a significam 3Jl1o~nt of human effon and
computing resources. On the orDer hano, a nonlinear dynamic analysis can represent a
major chal!enge to the ingeiluity of rhe aria]yst and require \'ery significant reso'ti'rees.' ,
Indeed, the mOSI imponant step in' the dynamic' analysis procedure is deRning a
mechanical mode] lhal accuralely represenls lhe physical problem. Theorelcal!y, a]]
structures possess an infinile number ofdegrees of freedolJl (DO!='J In other words, an
iilfinite number of independent spatial coordinates are required to completely specify the
position of al! points on the srructure at any insrant Df time [6J, However, most practica]
ana]yses are conducled on mechanical models having a finite number of DOF. For each
DOF exhibited by a structure. rhere existS::a l1ori1m/frr!'trrr'el1C\' (or natural penod) of vibra-
ron. For each natural fr4uency, the structure vibrates in a p:micular mode of vibratan.
For most large. complex structures; however, it s no! necessai)' to determine al!
the system natur2.! frequencies, since reJively few of rhese vibration modes contribule
appreciably to the dynamic response, ;Therefore, the mecha ni cal made] shouJd be
(d)
1
/
I
i
/
I
/
I
I
(e)
k
(b)
11
.JlI.~,.,-...r
m(v). k(v)
"
\
1.5 Mec:-:cdologV Por O'lnamic p.nal'fsis 7
defined in such a manner rhar only rhose vioraron modes rhar significanriy conrributc
ro rhe dynamic response are accurarely represenred.
In general, rhe mechanical model can be caregorized as eirher cOl1linuOllS or dis-
crele. Thetype of mechanical mode! employed for ao analysis affects the nature of the
goveming differential equations and their subsequent solurion. For a conrinuous model,
- the-marhemaiiCaIfonni.!!ation of mprei5Ierri'-results in a: sysrem of partial differential
equarions. However, for a discrete system lile mathemarical formularion yields a set of
ordinary differenrial equations, one for each DOF. Analytical soIutions for partia! dif-
ferenrial equations and fOL large systems of ordinary differenrial equations are quire
cumbersome. if not impossible in many cases. Therefore, in most pracrica! applic:ltions
numerical solution techniques must be employed.
Consider the transverse vibration orrne mulristory building struc[Ure illustrared in
Figure 1.60.. In reality, the strucrure maillfesrs distributed mass and sriffness characteris-
tics 2.long irs heighr. The conrinuous mode! represenraion of the srrucrure is sho\vn in
Figure 1.6b. The marhemarica! formul2tion of he conrinuous model incorporares the dis-
rriauted mass, m(\') , and sriffness. k(\') , ch2Sacterisrics of rhe srrucLUre. Moreo'ler, rhe
independenr displacemenr variable xl}'.!) is a funcrion of borh posiion y and lime l.
Therefore, the resulring equationsDf moion must be partial diffcrenrial equations. Dis-
crete mod~l represeritario,ns of lile same srucrure are illusrrared in Figure 1.6c and d.
These models are .commoniy referred (Q as wnped mass modes because rhe sysrem is
assumed ro be represenred -by a small numacr of !ocr:llized (or lumped) masses. The repre-
Senr3.elOn portrayed in Figure l.c is a singlc-degree-of-freedom (SDOF) syseern, in
which [he enrLre mss m of-rhe SlnlCture is localized (lumped) ar [he lOp and rhe seructure
has constan[ stiffness k, The independent dlspl2.cemenr variable x(t) of he mass is a func-
rion of tim~ alone. Thus r~<::single resulcing equarion of morion lS an ordinary dift"ereiHlal
equaion. The lumped milss.represeneJ,ion shown in Figure [.6d lS a rhree-DOF system in
which the mass of the srruccure is localized ar three loorions. Each localized mass, 17! l'
m" and 11I3' has ies own displacemenr vari:Ie, X,(I), x.,Jr) , and -'3(1), respecrively. This
mode! also e:dbirs rhIee discrere stiffness eerms,k" k" and kJ. The resulting equaeiol1s of
morlon for chis mode! a~asee of wee simulr3.neous ordinary differenrial equations.
......-- .. "'- ..... -..
Figure 1.6
Mecnanical models for multiscory building sructure: (a) pnysica! represencation: lb) continuous model:
(c)SDOF dis.::ree madel; (d) tnree-DOF discrete model.
.,- ,-G ... :.
,~
!-
8 CHAPTER 1 Basic Concepts
/
Practica! dynamic ana!ysis of large, complicated multidegree-of-freedom (MDOF)
structures is generally accomplished thi'ough a computer-implemented numercal anal-
__ysis technique known as the f!nir~ elemenr mer/od (FEM). In FEM analyses, con-
. tinuous syslems - are characterzed as' discrete MDOF system~~Mny- commercia1Jy
available, general purpose FEM computer programs, such as ADINA [7J, have been
used successi\'eJy in modeling very complex problems in varous areas of engneering.
FEM models possessing tens of thousands of DOF are not uncommon. The complexity
and detail of the FEM model used in a particular analysis is highly dependent on !he
unique aspectS of the response the analyst seeks.
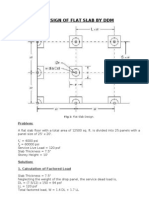
Consider, for example, the multgirder steel highway bridge illustrated in Figure
1.7. The steel girders shown in the plan yiew (Figure 1.7a) serve as the primary load-
G9' I
GS I ,----
G71 J
G6 I I I
G51 ~/G;;dW
G'" I
~ I
G3 i I
G" ~
GlJ
l
I
D6,
DS!
DJ
D3! . /' Diaphragms
D117
~
4 spans @ 6.J3 m = 14.4 m
(a)
u
U
22.1 m'
0.43 m
\ 2.00 m
~
3.66m 3.66 m 3.66 m
I
I
I
I
- G IG2 G3 G~ GS G6 G7 GS G9 J I ~~~-
J ..:.._ ln
] AO m ; 8 @ 2.44 m = 19.5 m ------------
0.330 m
(b)
Figure 1.7
Multigirder sleel high",ay bridge: (a) plan view: (b) typical cross section ..
Figure 1.8
Isomecric view of fEM model for bridge.
There are severo.ltypes Qfscruccuro.l vibration. A strJcture can be caused ea vibrate by
imposing upon it some)titi(!! conditions. or disturbances [8J. InitiJl conditions get'ler-
ally manifest themselves as an energy input stlch as a velocity imparted to the mass of
the structure (kinetic energy) or a displacement configuratton imposed upon the struc-
cure (potential energy) ~tbat is suddenly removed. The resulcing structural '1ibration
occurs inthe absence ?,f any externa!!y applied forces. and is termed free vibmcioTl.
Free vibration usua][y occurs at the fundamental natural frequency (lowest frequency)
of the struccure. Since t~ere is no external e.,citation acting on the structure. the '1ibra-
tions diminish with time as the energy input to che struccure from the initial conditions
eventua][y is dissipated:or damped out.
The vibrations of.a structure under he influence of external excitution are calkd
forced vium{iolls. If-h<:l source of the excication is periodic, che vibration consists of a
sre(!dy-swre respollse ahd a {((!!1slenr respollse. Tk steady-state response transpires at
the frequency of the-cation. When the e,'(cita[ion frequency coincides with one of
[he natural frequencies 'of he structure, a condi[iol1 knOIVn as reSO!lallce exists. At res-
onanCe, the amplitudes.{jf the vibrations becpme exceedingly large and are limied only
by the clamping in he scructure.
1.6 Types ofStructural Vibration ~ 9
carrying members. The ~cructural syscem is cypical!y cied cogether by a reinforced con-
crete deck slab o.nd tramver,e sceel members. or dio.phrJgms, thac span cransverscly
becween the girders as s.hown in ch:; bridge cross-section illllstration (Figure! .7b) To
assess che etlecti';eness of '1e diaphragms in discribllting truck trartic loads transversely
among che girders. a det~ildd FE\[ model of che bridge is required. An sometric view of
he FE'vl model for the bridge struccure 0[" Figure 1.7 is illustraced il1 Figure 1.8. This
model exhibits o'ler50',000 active DOF.
,l',
1.6 TVPES OF STRUCTURAL VIBRATION
10 CHAPTER 1 Basic Concepts
. \
The transient response is due to the initial energy stored in the stllJCture and is
manifested as oscillations generall)' occurring at the fundamental natural freguency of
the structure. The transients are usuaJly completely damped out after several cyeJes of
vibra~Lon, ,!!e!l1,significant in.-comp_arisonJo th~_steadY-S1at~ _yibr<).lions, -and can ~
ignored. However, if the structu,re is excited by a suddenly applied nonperiodic force
(such as a bIast), the subseguent response is also a transient response, since steady-state
osciJlations are not produced. Similar to free vibration, the transient osciJlations occur
at the natural freguencies of the structure. Theamplitude of the transient response var-
ies in a manner dependent upon the nature of L1e excitation.
1.7 ORGANIZATION OF THE TEXT
This book was conceived as an introductor)' text for both undergraduate and graduate
courses in civil engineering, It includes a variety of IOpics in the theory of struetural
dynamics as \Vell as applications of this theory to the analysis and response of strue-
tures subjeet to ear:rhquake excitation, bJast loading, e.nd wave forces., The book also
addresses wav'e propagation phenomena in clastic medie., Althogh the applicatiollS of
structural dynamics in civil engineering are different from those encountered in
mechanical engineering, engineering mechanics, and aerospace engineering, the princi-
pIes and salution techniques are basicaJly he same. Therefore. this text emphasizes
these principies and salution technigues (especial]y numerical solution techniques),
and illustrates them with o\'er 135 worked-out examples. owr -\60 homelVork prob-
lems, and approximately 800 iJlustrations.
The book is orge.nized in fi\'e parts: 1. Single-Degree-of-~reedom (SDOF)
Systems: lI, l\Jultidegree-of-Freedom (MDOF) Systems: m. Continuous Systems:
IV. Nonlinear Dynamic Response: and V. Practica] AppJications. Although the empha-
ss of the book is drected toward linear problems in struetural dyn3mics, echniques for
solving a limired elass of nonlinear structural dynamies problcms are a!so ntroduced.
J?ecause of he wide variet)' of topieal coverage presenred in !lis texr, many of the
mahematical s)'mbols and orher notaton have multip]e representations, Therefore, ro
maintain eonsisrenc)' and clant)' ofpresentation, a separare noration secrion is provided
at !he end of eaeh chapter.
Part 1, which includes Chapters 2 through 8, addresses he \'ibration of SDOF sys-
tems. SDOF s)'stems,are studied in great detail because many practica] probJems C3n be
sol ved with this formulaton and many of the so]ution teehniques developed for SDOF
s)'stems can be easi1y modified and extended to the solution of MDOF systems. Ch3p-
ler 2 discusses the formulaton of lhe eguations of motion for SDOF systems by appli-
cation of Newton's second law, he energy method, and lhe principle of virtual
dsplacement. Chapler 3 addresses the undamped free vibration of SDOF systems, and
Chapter 4 discusses the free vibration of SOOF sysrems possessng vscous, hysteresis,
01' Coulomb damping. Chapter 5 examines the response of SDOF systems to harmonic
exciralion, Some of the most imponant fundamerltal cqncepts in stnJctural dynamics
are discussed in this chapter. such as resonance, force transmission.,..:::nd vibraton isola-
lion. Chapter 6 discusses the response of SDOF systems 10 periodie (nonnarniOTfic)
excit3tion as we]] as lhe response [O arbi-trary dynamic exciraton by imp]ementaton of
the Duhamel integral method; this chapter also ntroduces <he concept of response
spectrum. Chapter 7 presents numencal teehniques for e\3!uaring the dynamic
response of SDOF systems. Pan 1eoncludes with Chapter 8. a discussion of frequency
doman soluti07' technigues for SDOF s)'stems.
\
1.7' Organizacion of the Text 11
Pan n, which ineludes Chapcers 9 mrough 13, addresses the dynamic response of dis-
crece MDOF systems. These. chapcers examine general MDOF systems, whose dynamic
response can be characterized by a finite number of DOF. Chapter 9 discusses some fun-
damental properties of MDOF vibrating systems, such as the mass and stiffness matrices,
and formuladon of me system eigenproblem. Chapter 10 examines me basic concepts and
procedres-for-me'free vibration analysis:'ofivIDOF-systems, and aIso presents several
approx.imate memods for estimating the fundamental frequency of MDOF systems. Chap-
ter 11 presents several comrnonly employed numerical solution techniques for extracting
the natural frequencies (eigenvalues) and mode shapes (eigenvectors) for MDOF systems.
Chapter 12 discusses me evaluation of the dynamic response of lvillOF systems by me
mode superposition method, and Chapter 13 examines the dynamic response of MDOF
systems by dlrect numerical integracion, and presents a discussion of the relalive advan-
tages of me mode superposition and direct numerical integration mechods.
Pan III of the te:<t, Chapter l4, concerns the vibrations of systems having distrib-
uted mass and stitTness properties. occootinuolJs systems. Continuous systems possess
an infinite number of DOF J.nd their equations of motion must be expressed in the form
of partial differenciJ.I equJ.tions. Chapter 14 examines he free vibratlon of uniform
rods, cables, and beams, as \Vd! as the unctJ.mped fOrced vibrJ.tion of beams, and dis-
cusses appro:<imate solution techniques that effecive!y transform cOfltinuous systems
imo equivalent discrete systems.
Part IV of the text, Chapter 15, is devoted tO non!inear dynamic response. Chapter
15 examines the various types of non!inearities and discusses the incremental formula-
tlon of the equations of mOlon for systems possessing n0l11inear characteristics. Thls
chapter also presents severJ.l commonly employed nume,icJ.l solution techniques ror
nonlinear equilibrium equa.tior,s as well as a. rigorous analysis of both SDOF and
MDOF el::tstoplastic systems.
Part V, Chapters l through 21, deals wlth severa.l practical app1ications of various
aspects of ba.SlC slfUctural dynamics theor)' discussed in Parts I hrough IV. Chapter l
addresses one-dimensiona.l wave propagation iLelastic media and discusses appllcations
to stress \Vave velocitles in uniform rods and collinear impact of bars. Chapter 17 pre-
sents a bnef seismologieal background on causes and characteristics of earthquakes, a.s
weIl as a discussiol1 of eanhql)a.ke graund motions. Chapte 18 presents deterministic
procedures for evaluating the response of stn:etures to earthquake ground mocions and
addresses both he time-history and response spectrum methods of analysis. Chapter 19
discusses ehe basie concepes that define b1ast oads on stI1Jctures and the corresponding
structural response. Chapter 20 discusses the basic eheories to describe water waves and
methodologies to select design waves. Finally. 'Chapter 2l discusses the response of
strUctures to wave forces, as weil as formulations for wave forces on small bodies and
large bodies, wih applications to both fixed structures and moving stn:ctures.
Many of the worked out examples and end-of-chapter problems presented in
Chapter 18 require the north-south ground motion compol1ent of the 1994 Northridge,
California earthquake as input. Numerical values for this ground acceleration record
(i.e., digitized accelerogram) are available on the author's \Veb site: www.Structur:ll-
D ynamics .com.
A majar emphasis of this text is the development of numerica! solution techniques
for a wide variety of structural dyiamics pcoblems. Therefore, listings for a number of
computer algorithms are presented throllghout the te.\t in the solutlons of varlous in-
te: examples. A suite of compllter programs chat may be employed ror the solution of
many of the end-of-chapter problems are described on the author's web site. Both he
source and execucabte codes ror these computer progro.m:i o.ee avail:lble on the web site.
, .
! 2 CHAPTER 1 Basic Concepts
. 8 SYSTEMS OF UNITS
The problems in his [ext arewrinen primarily using [he Eng!ish system of units. However,
in recogniion ohhe facnhat !here wil! evenlually be a changefrom the Engn9h system of
unit.s to the lntemationa! System of Units (S1), and reaJizing ha[ !he t\Vo systems wil!
coexist for some years, a 1imited number of probJems are presenled in SI units. Table 1.1
shows some quantiies rypicaIJy used in strucuraI dynaflljcs in both Englsh and SI units,
as \Vell as con\'ersion factors for lransforming from English units ro SI units.
\BLE 1.1 S)'stems of Units
QU3f1lity
Engli;h 5ystem 51 Syslem
Conversion Factor
Lengh
fOOI (l) meler (m)
0.30~8
inch (in)
meler (m) 0.0254
Force
pound (lb) newlon (N)
4.4,82
klp (1000 lb)
newwn (N)
4-+48.2
Mass
slug (Ib-sec'/f)
kiJogram (kg)
14.59
pound-m<l.Ss (Ibm)
ki!ogram (kg)
0.045359
M~ss densir)'
Ibm/fl'
kg/m3
]6.02
lbm/in"
kg/m"
27680.0
Stress or pressure
lb/fl" (psfl
N/m" (Pa)
47.88
lb/in" (psi)
N/m" (Pa)
6894.8
Acceleration
ftlsec"
m/sec"
0.3048
in/sec:
m/sec' 0.0254
Velocity
fusee m/sec 0.3048
in/s::,c
IT'Jsec 0.0:'.54
Volume
fl';
1
0.0283 I7 !TI-
Momen! or wrque
in-lb N-m 0.113
fl-lb
N-m 1.356
FERENCES
lr\'ine. H.M ... 5l1'l(clural D)'namics for /he PraC/icil/g
EI/gilleer, AII)'n and Un\\'jn, Boston, 1986.
Tauchel1, T.R .. EI/ergy Principies in 5/ruc/llral Mecholl-
ics, McGraw-HilJ, New York, 1974,
Clough, R.W. and Penzien, J., Dynanzics of 5ll'/1C/ures,
MeGraw-Hill, New York, 1975.
Craig, R.R., 51ruclllral Dynamics, Al] !ll/roduC/ion 10
ComplllerMelhods, Wik:-'. New York, 1981.
Bathe, K.J., "Some Ad"'ances in Finile Elemem Poce-
dures for Nonlinear Strucrural and Thermal Problems."
Proceedings of Ihe SYl1lposiul1I on Fwure DireC/ions 01
COl1lplllOliona/ Mechanics, Winter Annual ",jeeting,
1986.
Beards. CF~ S/ruc-mral Vibralion Ani1lysis:.Model/ing,
Analysis olld Dall1ping 01 VibrOling 51T/1Ciures, Wile)',
New York, 1983.
7 ADINA,,"A Finite Ekrnenr COIl1puter Prograrn for.AuIO-
matic Dynamic InCeml:nral 0:onlinear Analysis," Reporl
ARD 90-J, ADINA R8.:D. lne., Watenown, MA, ] 990.
8 Tse, F.S"Morse, LE .. and Hink.le, R.T., Mechanical
Vibraliol1s, Theol)' and App!icOIions, 2nd ed., Allyn and
Bacon, Boston, 1978.
9 Stallings, J.M., Cousins, T,E., and Tedesco, J.W ..
"Fatigue otDiaphragm--Girder Connections," Final
Reporl RP 930307, Aubum Univesity Highw2;'
Research Center, Aubum Uni\ersity. AL, 1996.
10 Tedesco, J.\\o'., Stalljngs. J.M .. and Tow. D.R .. "Finite
Ekment Method An~lysis of Bridge Girde-Diaphragm
lnteraction,~' COl1lp:l/crs ond 51n10Ilres, Vol. 56, No. 2,
1995, pp. 4~1~73,
Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- US Tsubaki Chain ManualDokument326 SeitenUS Tsubaki Chain ManualJorge FernandezNoch keine Bewertungen
- Moment Connection - TablesDokument95 SeitenMoment Connection - Tablescactushito100% (1)
- IS800 2007 I-Section 1 Detailed CalculationDokument5 SeitenIS800 2007 I-Section 1 Detailed CalculationJigar Piyush ShahNoch keine Bewertungen
- Design of Flat Slab by DDMDokument16 SeitenDesign of Flat Slab by DDMNafees Imitaz100% (1)
- Double Pipe Heat Exchanger DesignDokument4 SeitenDouble Pipe Heat Exchanger Designdip_maanNoch keine Bewertungen
- Burt Goldman - New Moon ProgrammingDokument1 SeiteBurt Goldman - New Moon Programmingsigilum_dei0% (2)
- A Bell-Type Annealing Furnac PDFDokument9 SeitenA Bell-Type Annealing Furnac PDFfercho-kun satochiNoch keine Bewertungen
- Flow MeasurementDokument9 SeitenFlow Measurementkenjosroy1Noch keine Bewertungen
- Chapter 2 - Aerodynamics - SomeFundamentalPrinciplesandEquationsDokument29 SeitenChapter 2 - Aerodynamics - SomeFundamentalPrinciplesandEquationsChristian NobertoNoch keine Bewertungen
- Bai & Pollard 2000 Fracture Spacing in Layered Rocks A New Explanation Based On The Stress TransitionDokument15 SeitenBai & Pollard 2000 Fracture Spacing in Layered Rocks A New Explanation Based On The Stress TransitionRICHARD REMY HUAYTA PACCONoch keine Bewertungen
- Laws of Corrresponding States - Nelson and ObertDokument4 SeitenLaws of Corrresponding States - Nelson and ObertIvan RodrigoNoch keine Bewertungen
- Influence of Temperature On The Fatigue PDFDokument10 SeitenInfluence of Temperature On The Fatigue PDFsalvo2miceliNoch keine Bewertungen
- Distance ChangingDokument22 SeitenDistance ChangingJohn MarsNoch keine Bewertungen
- NozzlePRO 14.1NewFeatures-2019ReleaseDokument13 SeitenNozzlePRO 14.1NewFeatures-2019ReleasedelitesoftNoch keine Bewertungen
- Final ProjectDokument4 SeitenFinal ProjectChacho BacoaNoch keine Bewertungen
- 4 - 1 Introduction To Heat TransferDokument15 Seiten4 - 1 Introduction To Heat TransferHassam khanNoch keine Bewertungen
- 19ASC303A Assignment 7 PDFDokument3 Seiten19ASC303A Assignment 7 PDFRD412Noch keine Bewertungen
- 11 Physics RevisionNotes Chapter 4 PDFDokument8 Seiten11 Physics RevisionNotes Chapter 4 PDFnellai kumarNoch keine Bewertungen
- Earth'S Orbit Path Around The Sun EssayDokument3 SeitenEarth'S Orbit Path Around The Sun EssaySebastián VegaNoch keine Bewertungen
- Physics MomentumDokument31 SeitenPhysics MomentumRado JaNoch keine Bewertungen
- PHYSICS Own NotesDokument4 SeitenPHYSICS Own NotesMica BernardoNoch keine Bewertungen
- XI Physics Holiday AssignmentsDokument2 SeitenXI Physics Holiday AssignmentsAnushka MishraNoch keine Bewertungen
- Ansys Fluid Dynamics Verification ManualDokument248 SeitenAnsys Fluid Dynamics Verification ManualMiguelSchuchterNoch keine Bewertungen
- HD 8 Prop Damped Modal AnalysisDokument22 SeitenHD 8 Prop Damped Modal AnalysisAnonymous lEBdswQXmx100% (1)
- Time: 3 Hours Max. Marks: 100Dokument1 SeiteTime: 3 Hours Max. Marks: 100Yatheesh KCNoch keine Bewertungen
- Forced Response of Swirl Stabilized Flames in Hydrogen Enriched Gas TurbinesDokument129 SeitenForced Response of Swirl Stabilized Flames in Hydrogen Enriched Gas TurbinesLi-An DingNoch keine Bewertungen
- Indian Association of Physics Teachers: National Graduate Physics Examination 2020Dokument11 SeitenIndian Association of Physics Teachers: National Graduate Physics Examination 2020PRIYANKANoch keine Bewertungen
- Emwf - t185 QsDokument6 SeitenEmwf - t185 QsSiva KumarNoch keine Bewertungen
- Descriptions of Fluid FlowsDokument2 SeitenDescriptions of Fluid FlowsdarshanNoch keine Bewertungen
- Flange CouplingDokument16 SeitenFlange CouplingARUN VNoch keine Bewertungen