Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Bus Ele Cat 1007 FLC 2018 PDFDokument470 SeitenBus Ele Cat 1007 FLC 2018 PDFjoy symNoch keine Bewertungen
- Speed Control of Shunt and Separately Excited DC Motors ReportDokument8 SeitenSpeed Control of Shunt and Separately Excited DC Motors ReportMuhammad Ali HaiderNoch keine Bewertungen
- Cro Manual PDFDokument6 SeitenCro Manual PDFJoshua Hynes100% (1)
- DC Tachogenerator Model E-SM60Dokument2 SeitenDC Tachogenerator Model E-SM60rasoolNoch keine Bewertungen
- Electrical Energy Management and Audit: METE 1133Dokument129 SeitenElectrical Energy Management and Audit: METE 1133Sri GhaNeshNoch keine Bewertungen
- Lop CatalogDokument62 SeitenLop CatalogJamesNoch keine Bewertungen
- Certificate of Completion (Electrical Works) : Republic of The Philippines Quezon CityDokument1 SeiteCertificate of Completion (Electrical Works) : Republic of The Philippines Quezon Cityrenalyn pacete100% (1)
- BC 404Dokument3 SeitenBC 404Pustinjak SaharicNoch keine Bewertungen
- Diode Equivalent CircuitsDokument36 SeitenDiode Equivalent CircuitsLymnuel LibunaoNoch keine Bewertungen
- UL 817 Rev 3 11 2015 1 5 2016 and 8 20 2018 ED 2 7 2021Dokument18 SeitenUL 817 Rev 3 11 2015 1 5 2016 and 8 20 2018 ED 2 7 2021sharilNoch keine Bewertungen
- BI-10-09004-0004 Marjan Increment Program Jubail Area-Pipeline Projact PKG#18 LV Cable Sizing CalculationDokument7 SeitenBI-10-09004-0004 Marjan Increment Program Jubail Area-Pipeline Projact PKG#18 LV Cable Sizing CalculationAfzal AsifNoch keine Bewertungen
- 71M651x Energy Meter IC: Using IR Diodes and PhototransistorsDokument7 Seiten71M651x Energy Meter IC: Using IR Diodes and Phototransistorsagus wiyonoNoch keine Bewertungen
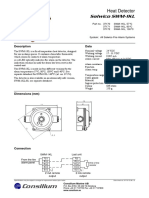
- Salwico SMM-1KLDokument1 SeiteSalwico SMM-1KLXiangping JiaoNoch keine Bewertungen
- Cours 4 Et Exercices Anglais TechDokument5 SeitenCours 4 Et Exercices Anglais TechÁł ÃăNoch keine Bewertungen
- CZRA4728-HF Thru. CZRA4764-HF: SMD Zener DiodeDokument7 SeitenCZRA4728-HF Thru. CZRA4764-HF: SMD Zener Diodecesar gaiborNoch keine Bewertungen
- SoftStart CI-25C - AI000086428503en-000303Dokument7 SeitenSoftStart CI-25C - AI000086428503en-000303Sting EyesNoch keine Bewertungen
- Fire Alarm Report1Dokument34 SeitenFire Alarm Report1Waheed Riaz SanghiNoch keine Bewertungen
- Dol - Power & Control Wiring Diagram-Scheme-1 ## DCS StopDokument1 SeiteDol - Power & Control Wiring Diagram-Scheme-1 ## DCS StopPolytex IndiaNoch keine Bewertungen
- Master List of Welders Sep 11Dokument91 SeitenMaster List of Welders Sep 11tskmechNoch keine Bewertungen
- Manual ServiceDokument53 SeitenManual Servicediego alejandro quiroga ramosNoch keine Bewertungen
- HVIL FailureDokument13 SeitenHVIL FailureankitNoch keine Bewertungen
- Data Sheet: 74HC14 74HCT14Dokument23 SeitenData Sheet: 74HC14 74HCT14Gerardo TexisNoch keine Bewertungen
- 6t SramDokument13 Seiten6t SramRekha KumariNoch keine Bewertungen
- Product Data Sheet: Standard Auxiliary Contact, Circuit Breaker Status OF/SD/SDE/SDV, 1 Changeover Contact TypeDokument2 SeitenProduct Data Sheet: Standard Auxiliary Contact, Circuit Breaker Status OF/SD/SDE/SDV, 1 Changeover Contact TypeChaima Ben AliNoch keine Bewertungen
- Technical Manual FOR Compact HF SSB N2161: S.P. Radio A/S Aalborg DenmarkDokument29 SeitenTechnical Manual FOR Compact HF SSB N2161: S.P. Radio A/S Aalborg DenmarkEstetNoch keine Bewertungen
- Shunmum: High Voltage Engineering (15EE73)Dokument404 SeitenShunmum: High Voltage Engineering (15EE73)Abdul JaleelNoch keine Bewertungen
- Buchholzrelay MBR For Liquid Immersed Transformers and Reactors With Conservator in Accordance With EN 50216-2Dokument13 SeitenBuchholzrelay MBR For Liquid Immersed Transformers and Reactors With Conservator in Accordance With EN 50216-2snooty.eli.gamedogsNoch keine Bewertungen
- PDFDokument2 SeitenPDFLarry CañongaNoch keine Bewertungen
- DG-S LadDokument2 SeitenDG-S LadMike ChuaNoch keine Bewertungen
- Title: Capacitor and Capacitance Time Allotment: 60 Minutes I. Learning TasksDokument5 SeitenTitle: Capacitor and Capacitance Time Allotment: 60 Minutes I. Learning TasksDixie M AgregadoNoch keine Bewertungen