Das könnte Ihnen auch gefallen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Mod BDokument32 SeitenMod BRuwina Ayman100% (1)
- Lecture 2 PDFDokument16 SeitenLecture 2 PDFsatheeshsep24Noch keine Bewertungen
- Rank Vs Communication ComplexityDokument9 SeitenRank Vs Communication ComplexityJeremyKunNoch keine Bewertungen
- Homework 1Dokument1 SeiteHomework 1JeremyKunNoch keine Bewertungen
- Homework 3Dokument1 SeiteHomework 3JeremyKunNoch keine Bewertungen
- Theorist's Toolkit Lecture 12: Semindefinite Programs and Tightening RelaxationsDokument4 SeitenTheorist's Toolkit Lecture 12: Semindefinite Programs and Tightening RelaxationsJeremyKunNoch keine Bewertungen
- Homework 2Dokument2 SeitenHomework 2JeremyKunNoch keine Bewertungen
- Theorist's Toolkit Lecture 4: The Dimension MethodDokument7 SeitenTheorist's Toolkit Lecture 4: The Dimension MethodJeremyKunNoch keine Bewertungen
- Homework 4Dokument1 SeiteHomework 4JeremyKunNoch keine Bewertungen
- Entire CourseDokument84 SeitenEntire CourseJeremyKunNoch keine Bewertungen
- Theorist's Toolkit Lecture 2-3: LP DualityDokument9 SeitenTheorist's Toolkit Lecture 2-3: LP DualityJeremyKunNoch keine Bewertungen
- Theorist's Toolkit Lecture 5: Dimension and The Lore of ExpandersDokument6 SeitenTheorist's Toolkit Lecture 5: Dimension and The Lore of ExpandersJeremyKunNoch keine Bewertungen
- Theorist's Toolkit Lecture 7: Random Walks, Analysis and ConvergenceDokument7 SeitenTheorist's Toolkit Lecture 7: Random Walks, Analysis and ConvergenceJeremyKunNoch keine Bewertungen
- Theorist's Toolkit Lecture 6: Eigenvalues and ExpandersDokument9 SeitenTheorist's Toolkit Lecture 6: Eigenvalues and ExpandersJeremyKunNoch keine Bewertungen
- Theorist's Toolkit Lecture 8: High Dimensional Geometry and Geometric Random WalksDokument8 SeitenTheorist's Toolkit Lecture 8: High Dimensional Geometry and Geometric Random WalksJeremyKunNoch keine Bewertungen
- Theorist's Toolkit Lecture 9: High Dimensional Geometry (Continued) and VC-dimensionDokument8 SeitenTheorist's Toolkit Lecture 9: High Dimensional Geometry (Continued) and VC-dimensionJeremyKunNoch keine Bewertungen
- Theorist's Toolkit Lecture 10: Discrete Fourier Transform and Its UsesDokument9 SeitenTheorist's Toolkit Lecture 10: Discrete Fourier Transform and Its UsesJeremyKunNoch keine Bewertungen
- Theorist's Toolkit Lecture 1: Probabilistic ArgumentsDokument7 SeitenTheorist's Toolkit Lecture 1: Probabilistic ArgumentsJeremyKunNoch keine Bewertungen
- Mixed Integer Prog - Excel Solver Practice ExampleDokument22 SeitenMixed Integer Prog - Excel Solver Practice Exampleendu wesenNoch keine Bewertungen
- MATHEMATICAL TRIPOS GUIDE TO COURSES IN PART IADokument12 SeitenMATHEMATICAL TRIPOS GUIDE TO COURSES IN PART IAmichael pasquiNoch keine Bewertungen
- Finding All Solutions of Piecewise-Linear Resistive Circuits Using Integer ProgrammingDokument4 SeitenFinding All Solutions of Piecewise-Linear Resistive Circuits Using Integer ProgramminggkovacsdsNoch keine Bewertungen
- CH 02 Modeling With Linear ProgramminDokument26 SeitenCH 02 Modeling With Linear ProgramminAura fairuzNoch keine Bewertungen
- Full ThesisDokument112 SeitenFull ThesisInfinity TechNoch keine Bewertungen
- QM10 Tif Ch09Dokument24 SeitenQM10 Tif Ch09Lour RaganitNoch keine Bewertungen
- David Gale: Born: DiedDokument4 SeitenDavid Gale: Born: DiedMihai DumitrascuNoch keine Bewertungen
- A Maximal Covering Location Model in The Presence of Partial CoverageDokument12 SeitenA Maximal Covering Location Model in The Presence of Partial Coveragerodolfo123456789Noch keine Bewertungen
- Mathematical ProgrammingDokument90 SeitenMathematical ProgrammingHidden heiderNoch keine Bewertungen
- Examiner's Report: F5 Performance Management June 2010Dokument3 SeitenExaminer's Report: F5 Performance Management June 2010Mareea RushdiNoch keine Bewertungen
- Chemistry Class 12 SyllabusDokument13 SeitenChemistry Class 12 SyllabusHunter AakashNoch keine Bewertungen
- HW3 S12Dokument1 SeiteHW3 S12Carlos JaureguiNoch keine Bewertungen
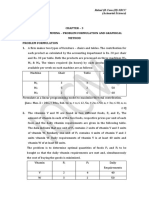
- Chapter - 3 Linear Programming - Problem Formulation and Graphical Method Problem Formulation 1. A Firm Makes Two Types of Furniture - Chairs and Tables. The Contribution ForDokument11 SeitenChapter - 3 Linear Programming - Problem Formulation and Graphical Method Problem Formulation 1. A Firm Makes Two Types of Furniture - Chairs and Tables. The Contribution ForYamica ChopraNoch keine Bewertungen
- Efficient Solutions To The Placement and Chaining Problem of User PlaneDokument16 SeitenEfficient Solutions To The Placement and Chaining Problem of User PlaneOussema OUERFELLINoch keine Bewertungen
- Lecture 5Dokument6 SeitenLecture 5Tony AbhishekNoch keine Bewertungen
- WORKSHEET - 1 (On Convex Set) .Dokument10 SeitenWORKSHEET - 1 (On Convex Set) .Gudeta nNoch keine Bewertungen
- EMGT810 Syllabus Spr22 - HO3Dokument5 SeitenEMGT810 Syllabus Spr22 - HO3Mohammed ImamuddinNoch keine Bewertungen
- 3.6. Tug SchedulingDokument8 Seiten3.6. Tug SchedulingAmelia Agista pNoch keine Bewertungen
- Week 4 SolutionDokument18 SeitenWeek 4 SolutionAditya Upgade100% (3)
- An Application of Branch and Cut To Open Pit Mine SchedulingDokument2 SeitenAn Application of Branch and Cut To Open Pit Mine SchedulingLeo Damian Pacori ToqueNoch keine Bewertungen
- PTS-23 For XII - by O.P. GUPTADokument7 SeitenPTS-23 For XII - by O.P. GUPTAshobhitNoch keine Bewertungen
- Chapter 22Dokument40 SeitenChapter 22u201021475Noch keine Bewertungen
- Ford-Fulkerson Method Via Linear Ranking Function For Solving Fuzzy Maximum Flow ProblemsDokument15 SeitenFord-Fulkerson Method Via Linear Ranking Function For Solving Fuzzy Maximum Flow ProblemsDaban SalhNoch keine Bewertungen
- 6 PolygonShapeBooksDokument6 Seiten6 PolygonShapeBooksacmcNoch keine Bewertungen
- Lecture 5-6-7 HARMONYDokument76 SeitenLecture 5-6-7 HARMONYAsif MahmoodNoch keine Bewertungen
- Linear ProgramingDokument40 SeitenLinear ProgramingFifah hNoch keine Bewertungen
- Opeartions Research MaterialDokument234 SeitenOpeartions Research MaterialMohamed JamalNoch keine Bewertungen
- Business Administrtion Operation Research PDFDokument32 SeitenBusiness Administrtion Operation Research PDFNagrathna Poojari100% (1)