Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- News & Views: Generation SoftDokument2 SeitenNews & Views: Generation SoftanandadiNoch keine Bewertungen
- 66584Dokument26 Seiten66584maverick12342Noch keine Bewertungen
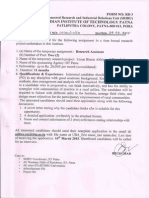
- Advertisement - Research AssistantDokument1 SeiteAdvertisement - Research AssistantanandadiNoch keine Bewertungen
- Microrobotics Using Composite Materials: The Micromechanical Flying Insect ThoraxDokument8 SeitenMicrorobotics Using Composite Materials: The Micromechanical Flying Insect ThoraxanandadiNoch keine Bewertungen
- Aaj Tmko Dene Ke Liye Hmne Bahut Socha Saare Sites Pr Ajeeb Ajeeb Gift Dekhe Bahut Saare e Cards Dekhe Kuch Pr Chota Sa Cute Sa Message Bhi Likhkar Dekha Pr Do Lines Hmari Itni Saari Feelings Ko Kaise Express Kr s - CoDokument1 SeiteAaj Tmko Dene Ke Liye Hmne Bahut Socha Saare Sites Pr Ajeeb Ajeeb Gift Dekhe Bahut Saare e Cards Dekhe Kuch Pr Chota Sa Cute Sa Message Bhi Likhkar Dekha Pr Do Lines Hmari Itni Saari Feelings Ko Kaise Express Kr s - CoanandadiNoch keine Bewertungen
- Piezoelectric MaterialDokument12 SeitenPiezoelectric MaterialanandadiNoch keine Bewertungen
- Figures of Speech ExplainedDokument5 SeitenFigures of Speech ExplainedDarenJayBalboa100% (1)
- Salford Care Organisation Job Description & Person SpecificationDokument14 SeitenSalford Care Organisation Job Description & Person SpecificationAyesha EhsanNoch keine Bewertungen
- New ALS MADRASAH COMBINEDDokument6 SeitenNew ALS MADRASAH COMBINEDJane BaysaNoch keine Bewertungen
- b2 Open Cloze - Western AustraliaDokument3 Seitenb2 Open Cloze - Western Australiaartur solsonaNoch keine Bewertungen
- War, Rivalry An State Building in Latin AmericaDokument16 SeitenWar, Rivalry An State Building in Latin AmericaPablo Andrés Garrido GonzálezNoch keine Bewertungen
- Oxy AcetyleneDokument43 SeitenOxy Acetyleneregupathi100% (1)
- Activity 2Dokument5 SeitenActivity 2Kier VillegasNoch keine Bewertungen
- Economics and The Theory of Games - Vega-Redondo PDFDokument526 SeitenEconomics and The Theory of Games - Vega-Redondo PDFJaime Andrés67% (3)
- T Cells & Autoimmunity, s3Dokument21 SeitenT Cells & Autoimmunity, s3LiaAriestaNoch keine Bewertungen
- Marketing Budget: Expenses Q1 Q2 Q3 Q4 Totals Budget %Dokument20 SeitenMarketing Budget: Expenses Q1 Q2 Q3 Q4 Totals Budget %Miaow MiaowNoch keine Bewertungen
- MB0042-MBA-1st Sem 2011 Assignment Managerial EconomicsDokument11 SeitenMB0042-MBA-1st Sem 2011 Assignment Managerial EconomicsAli Asharaf Khan100% (3)
- Delhi Mumbai Award Status Mar 23Dokument11 SeitenDelhi Mumbai Award Status Mar 23Manoj DoshiNoch keine Bewertungen
- RA 5921 and RA 10918Dokument32 SeitenRA 5921 and RA 10918Hani Loveres100% (1)
- New Company Profile.Dokument8 SeitenNew Company Profile.Allen AsirNoch keine Bewertungen
- Soft StarterDokument6 SeitenSoft StarterEric Maglinte TolosaNoch keine Bewertungen
- E.bs 3rd-Unit 22Dokument46 SeitenE.bs 3rd-Unit 22DUONG LE THI THUYNoch keine Bewertungen
- Nutritional support through feeding tubesDokument76 SeitenNutritional support through feeding tubesKryzza LeizellNoch keine Bewertungen
- Snorkeling: A Brief History and Guide to This Underwater AdventureDokument3 SeitenSnorkeling: A Brief History and Guide to This Underwater AdventureBernadette PerezNoch keine Bewertungen
- Falling Weight Deflectometer Bowl Parameters As Analysis Tool For Pavement Structural EvaluationsDokument18 SeitenFalling Weight Deflectometer Bowl Parameters As Analysis Tool For Pavement Structural EvaluationsEdisson Eduardo Valencia Gomez100% (1)
- Acid content in fruitsDokument2 SeitenAcid content in fruitsbone fire100% (1)
- The German eID-Card by Jens BenderDokument42 SeitenThe German eID-Card by Jens BenderPoomjit SirawongprasertNoch keine Bewertungen
- Gregory University Library Assignment on Qualities of a Reader Service LibrarianDokument7 SeitenGregory University Library Assignment on Qualities of a Reader Service LibrarianEnyiogu AbrahamNoch keine Bewertungen
- Process of Producting High Carbon Ferro ChromeDokument5 SeitenProcess of Producting High Carbon Ferro ChromeSantosh Kumar MahtoNoch keine Bewertungen
- Philippine Politics Concepts ExplainedDokument3 SeitenPhilippine Politics Concepts ExplainedAngel Lyn A Lacerna100% (1)
- Business Ethics Concepts & Cases: Manuel G. VelasquezDokument19 SeitenBusiness Ethics Concepts & Cases: Manuel G. VelasquezRaffi MouradianNoch keine Bewertungen
- Reading in Philippine History (Chapter 3)Dokument14 SeitenReading in Philippine History (Chapter 3)AKIO HIROKINoch keine Bewertungen
- Administrations whose CoCs are accepted for CECDokument1 SeiteAdministrations whose CoCs are accepted for CECGonçalo CruzeiroNoch keine Bewertungen
- MF-QA-001 PDIR ReportDokument2 SeitenMF-QA-001 PDIR ReportBHUSHAN BAGULNoch keine Bewertungen
- Expt 1 Yarn Formation (Sherley Trash Analyser)Dokument7 SeitenExpt 1 Yarn Formation (Sherley Trash Analyser)Yashdeep Sharma0% (1)
- Vonovia 9M2021 Presentation 20211118Dokument76 SeitenVonovia 9M2021 Presentation 20211118LorenzoNoch keine Bewertungen