Das könnte Ihnen auch gefallen
- Checkpoint Services: Application Program InterfaceDokument17 SeitenCheckpoint Services: Application Program Interfacegame___overNoch keine Bewertungen
- NS3 TutorialDokument46 SeitenNS3 TutorialahmedabdullaNoch keine Bewertungen
- Openmtc: M2M Solutions For Smart Cities and The Internet of ThingsDokument7 SeitenOpenmtc: M2M Solutions For Smart Cities and The Internet of Thingsgame___overNoch keine Bewertungen
- Maam Ss 0017Dokument3 SeitenMaam Ss 0017game___overNoch keine Bewertungen
- 05 Challenges of LTE Advance Rel10 13Dokument75 Seiten05 Challenges of LTE Advance Rel10 13game___overNoch keine Bewertungen
- Specification: 1. HousingDokument2 SeitenSpecification: 1. Housinggame___overNoch keine Bewertungen
- 140 MHZ Bandpass Filter 19.4 MHZ Bandwidth Sf0140Cf1Xxxxt: Part NumberDokument2 Seiten140 MHZ Bandpass Filter 19.4 MHZ Bandwidth Sf0140Cf1Xxxxt: Part Numbergame___overNoch keine Bewertungen
- J LCB140S 20A: Top View Bottom ViewDokument2 SeitenJ LCB140S 20A: Top View Bottom Viewgame___overNoch keine Bewertungen
- J Lcl70A: Top View Bottom ViewDokument2 SeitenJ Lcl70A: Top View Bottom Viewgame___overNoch keine Bewertungen
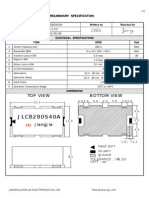
- J LCB280S 40A: Top View Bottom ViewDokument2 SeitenJ LCB280S 40A: Top View Bottom Viewgame___overNoch keine Bewertungen
- AH1Dokument6 SeitenAH1game___overNoch keine Bewertungen
- AD780Dokument10 SeitenAD780game___overNoch keine Bewertungen
- Gaas Ic 5 Bit Digital Attenuator 1 DB LSB Positive Control 0.5-2.5 GHZDokument5 SeitenGaas Ic 5 Bit Digital Attenuator 1 DB LSB Positive Control 0.5-2.5 GHZgame___overNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Arens - Auditing and Assurance Services 15e-2Dokument17 SeitenArens - Auditing and Assurance Services 15e-2Magdaline ChuaNoch keine Bewertungen
- Spesifikasi PM710Dokument73 SeitenSpesifikasi PM710Phan'iphan'Noch keine Bewertungen
- Prelim Examination MaternalDokument23 SeitenPrelim Examination MaternalAaron ConstantinoNoch keine Bewertungen
- Agnes de MilleDokument3 SeitenAgnes de MilleMarie-Maxence De RouckNoch keine Bewertungen
- CH 1 - Democracy and American PoliticsDokument9 SeitenCH 1 - Democracy and American PoliticsAndrew Philip ClarkNoch keine Bewertungen
- FM 2030Dokument18 SeitenFM 2030renaissancesamNoch keine Bewertungen
- Pavement Design1Dokument57 SeitenPavement Design1Mobin AhmadNoch keine Bewertungen
- Hole CapacityDokument2 SeitenHole CapacityAbdul Hameed OmarNoch keine Bewertungen
- ME Eng 8 Q1 0101 - SG - African History and LiteratureDokument13 SeitenME Eng 8 Q1 0101 - SG - African History and Literaturerosary bersanoNoch keine Bewertungen
- Chapter 2 ProblemsDokument6 SeitenChapter 2 ProblemsYour MaterialsNoch keine Bewertungen
- GPS Spoofing (2002-2003)Dokument8 SeitenGPS Spoofing (2002-2003)Roger JohnstonNoch keine Bewertungen
- C C C C: "P P P P PDokument25 SeitenC C C C: "P P P P PShalu Dua KatyalNoch keine Bewertungen
- Hey Friends B TBDokument152 SeitenHey Friends B TBTizianoCiro CarrizoNoch keine Bewertungen
- DNA ReplicationDokument19 SeitenDNA ReplicationLouis HilarioNoch keine Bewertungen
- Developing Paragraphs: Test Section - Writing Task 2Dokument11 SeitenDeveloping Paragraphs: Test Section - Writing Task 2Cengizhan AkdağNoch keine Bewertungen
- Sba 2Dokument29 SeitenSba 2api-377332228Noch keine Bewertungen
- Nama: Yossi Tiara Pratiwi Kelas: X Mis 1 Mata Pelajaran: Bahasa InggrisDokument2 SeitenNama: Yossi Tiara Pratiwi Kelas: X Mis 1 Mata Pelajaran: Bahasa InggrisOrionj jrNoch keine Bewertungen
- The JHipster Mini Book 2Dokument129 SeitenThe JHipster Mini Book 2tyulist100% (1)
- 3 ALCE Insulators 12R03.1Dokument12 Seiten3 ALCE Insulators 12R03.1Amílcar Duarte100% (1)
- Washing Machine: Service ManualDokument66 SeitenWashing Machine: Service ManualFernando AlmeidaNoch keine Bewertungen
- QP December 2006Dokument10 SeitenQP December 2006Simon ChawingaNoch keine Bewertungen
- Borang Ambulans CallDokument2 SeitenBorang Ambulans Callleo89azman100% (1)
- Online Extra: "Economists Suffer From Physics Envy"Dokument2 SeitenOnline Extra: "Economists Suffer From Physics Envy"Bisto MasiloNoch keine Bewertungen
- Opc PPT FinalDokument22 SeitenOpc PPT FinalnischalaNoch keine Bewertungen
- PM CH 14Dokument24 SeitenPM CH 14phani chowdaryNoch keine Bewertungen
- Technology Management 1Dokument38 SeitenTechnology Management 1Anu NileshNoch keine Bewertungen
- Solved Simplex Problems PDFDokument5 SeitenSolved Simplex Problems PDFTejasa MishraNoch keine Bewertungen
- Mastertop 1230 Plus PDFDokument3 SeitenMastertop 1230 Plus PDFFrancois-Noch keine Bewertungen
- Business Plan 3.3Dokument2 SeitenBusiness Plan 3.3Rojin TingabngabNoch keine Bewertungen
- Android Developer PDFDokument2 SeitenAndroid Developer PDFDarshan ChakrasaliNoch keine Bewertungen