Das könnte Ihnen auch gefallen
- The Geoid and The Height Systems The Geoid and The Height SystemsDokument5 SeitenThe Geoid and The Height Systems The Geoid and The Height SystemsKismet100% (1)
- The Geodetic Datum and The Geodetic Reference SystemsDokument6 SeitenThe Geodetic Datum and The Geodetic Reference SystemsKismetNoch keine Bewertungen
- Geodesy 1Dokument32 SeitenGeodesy 1Anonymous BoDKa2YuuNoch keine Bewertungen
- Fundamental Parameters of The Ellipsoid, The Meridian Ellipse, and Coordinate ConversionDokument7 SeitenFundamental Parameters of The Ellipsoid, The Meridian Ellipse, and Coordinate ConversionKismet0% (1)
- The Ellipsoid and The Reference Surface The Ellipsoid and The Reference SurfaceDokument6 SeitenThe Ellipsoid and The Reference Surface The Ellipsoid and The Reference SurfaceKismet0% (1)
- Lecture 9Dokument8 SeitenLecture 9Kismet100% (2)
- Definitions, Branches, Objectives, Professions and Organizations, History and DevelopmentDokument9 SeitenDefinitions, Branches, Objectives, Professions and Organizations, History and DevelopmentKismet100% (1)
- Cg601 Geodesy 2 Topic 1Dokument53 SeitenCg601 Geodesy 2 Topic 1Lyana Zul100% (2)
- Normal Sections On The EllipsoidDokument8 SeitenNormal Sections On The EllipsoidKismet100% (3)
- GE Exams and AnswerDokument17 SeitenGE Exams and AnswerBree100% (1)
- Geometric Geodesy Geometric GeodesyDokument10 SeitenGeometric Geodesy Geometric GeodesyKismet100% (1)
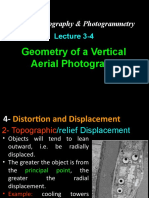
- Lecture 3-4 - Geometry of A Vertical Aerial PhotographDokument35 SeitenLecture 3-4 - Geometry of A Vertical Aerial PhotographFaisel mohammedNoch keine Bewertungen
- GE Student Handbook 2015Dokument48 SeitenGE Student Handbook 2015Angelie LapeNoch keine Bewertungen
- Print TNPDokument32 SeitenPrint TNPJoseph Tinio CruzNoch keine Bewertungen
- Ge100 Lecture 2Dokument43 SeitenGe100 Lecture 2honey jamero100% (3)
- Relative Strength of Figure by Broddett AbatayoDokument21 SeitenRelative Strength of Figure by Broddett AbatayoBroddett Bello Abatayo100% (1)
- 1 Cartography (GELER 2) TermsDokument16 Seiten1 Cartography (GELER 2) TermsApple Pillos-LabroNoch keine Bewertungen
- Physical Geodesy LectureDokument27 SeitenPhysical Geodesy LectureKarl Luis RagmaNoch keine Bewertungen
- GEODESY Review Exam No AnswerkeyDokument4 SeitenGEODESY Review Exam No AnswerkeyMichael Densing Inso100% (2)
- Defin - N Ver 2Dokument26 SeitenDefin - N Ver 2Renz Janfort Junsay GraganzaNoch keine Bewertungen
- Board of Geodetic Engineering PDFDokument1 SeiteBoard of Geodetic Engineering PDFErick Abarientos100% (1)
- C !" !! !#$"%&'!$ (#) ( (C !" !!!#$"%+&+'!$ +!%PMDokument8 SeitenC !" !! !#$"%&'!$ (#) ( (C !" !!!#$"%+&+'!$ +!%PMing_nistorNoch keine Bewertungen
- Cayapan WGS84 PRS92 PDFDokument21 SeitenCayapan WGS84 PRS92 PDFBea Maica Gavino100% (1)
- Geometric Geodesy B (2010)Dokument212 SeitenGeometric Geodesy B (2010)Ms Rain100% (1)
- Geode SyDokument10 SeitenGeode SyBeltran KathNoch keine Bewertungen
- Triangulation and TrilateritationDokument62 SeitenTriangulation and TrilateritationVicky ZambranoNoch keine Bewertungen
- CartoDokument6 SeitenCartoBeltran KathNoch keine Bewertungen
- Geode SyDokument10 SeitenGeode SyBeltran KathNoch keine Bewertungen
- Lecture 13 - Techniques For Vertical Distance MeasurementsDokument23 SeitenLecture 13 - Techniques For Vertical Distance MeasurementsAndreaMiccaBautista0% (1)
- Surveying Book - CompiledDokument95 SeitenSurveying Book - CompiledJeffreyLamsisNoch keine Bewertungen
- Law Exam ReviewerDokument5 SeitenLaw Exam ReviewerBeltran Kath100% (1)
- Cartography 4 - Additional NotesDokument24 SeitenCartography 4 - Additional NotesARNOLD MORANNoch keine Bewertungen
- Gross Errors. Systematic Errors. All The AboveDokument7 SeitenGross Errors. Systematic Errors. All The AboveJoseph Tinio CruzNoch keine Bewertungen
- Selected Topics in Geodesy Part 2Dokument53 SeitenSelected Topics in Geodesy Part 2Osama SherifNoch keine Bewertungen
- Geodetic Surveying PDF NotesDokument2 SeitenGeodetic Surveying PDF NotesRichard Bryan100% (6)
- DAO 1998-12 Sec. 5-12 Multiple Choice SampleDokument2 SeitenDAO 1998-12 Sec. 5-12 Multiple Choice SampleBroddett Bello Abatayo100% (2)
- Theory and PracticeDokument5 SeitenTheory and PracticeRAUL BECERRONoch keine Bewertungen
- Mine Surveying CompileDokument31 SeitenMine Surveying Compilenuno pereira0% (1)
- Photoframmetry SupplementDokument4 SeitenPhotoframmetry SupplementBreeNoch keine Bewertungen
- GE 102 - Geometric - Geodesy - Topic - 3 - Part - 1 PDFDokument35 SeitenGE 102 - Geometric - Geodesy - Topic - 3 - Part - 1 PDFJustin Avila0% (1)
- Geodetic Astronomy Part4Dokument19 SeitenGeodetic Astronomy Part4kenken games100% (1)
- Lecture 18Dokument10 SeitenLecture 18Kismet100% (3)
- Lecture 4 Tape CorrectionsDokument26 SeitenLecture 4 Tape CorrectionsAndreaMiccaBautista100% (2)
- DAO 1998-12 Sec. 1-4 Multiple Choice SampleDokument2 SeitenDAO 1998-12 Sec. 1-4 Multiple Choice SampleBroddett Bello AbatayoNoch keine Bewertungen
- Lecture 10B - Area Computation Techniques and Omitted MeasurementsDokument14 SeitenLecture 10B - Area Computation Techniques and Omitted MeasurementsAndreaMiccaBautistaNoch keine Bewertungen
- Theory and Practice QuestionsDokument82 SeitenTheory and Practice QuestionsNicole CruzNoch keine Bewertungen
- CartoDokument59 SeitenCartoRhea CelzoNoch keine Bewertungen
- 547 To 575Dokument7 Seiten547 To 575marvy joy borlioNoch keine Bewertungen
- GE 122 Prelim Exam SolutionDokument13 SeitenGE 122 Prelim Exam SolutionNeilyn Bongalan100% (1)
- Preboard 2 TNP 2022Dokument8 SeitenPreboard 2 TNP 2022Christorey MontegrandeNoch keine Bewertungen
- The Elliptic Arc, Azimuth, and Chord of A Normal SectionDokument10 SeitenThe Elliptic Arc, Azimuth, and Chord of A Normal SectionKismet100% (2)
- Theory of Errors and AdjustmentDokument80 SeitenTheory of Errors and AdjustmentGabriela CanareNoch keine Bewertungen
- GE 122 Lecture 2 (PROJECT CONTROL SURVEY) By: Broddett Bello AbatayoDokument104 SeitenGE 122 Lecture 2 (PROJECT CONTROL SURVEY) By: Broddett Bello AbatayoBroddett Bello Abatayo100% (1)
- LawDokument10 SeitenLawjerald lagoNoch keine Bewertungen
- BS in Geodetic Engineering Curriculum - Caraga State UniversityDokument3 SeitenBS in Geodetic Engineering Curriculum - Caraga State UniversityBroddett Bello AbatayoNoch keine Bewertungen
- GE 105 Lecture 5 (STRENGTH OF FIGURE) By: Broddett Bello AbatayoDokument18 SeitenGE 105 Lecture 5 (STRENGTH OF FIGURE) By: Broddett Bello AbatayoBroddett Bello Abatayo50% (2)
- Lecture 1 Review of Reference Systems - HorizontalDokument39 SeitenLecture 1 Review of Reference Systems - HorizontalVlaire Janrex LondoñoNoch keine Bewertungen
- Basic of GnssDokument170 SeitenBasic of GnssAlex NkurunzizaNoch keine Bewertungen
- 3 - Basic Geodesy, GCSystemDokument17 Seiten3 - Basic Geodesy, GCSystemهیوا حسینNoch keine Bewertungen
- KuboDokument145 SeitenKuboEdi KazuoNoch keine Bewertungen
- 15 - GN 11 - Reviewing ValuationsDokument10 Seiten15 - GN 11 - Reviewing ValuationsKismetNoch keine Bewertungen
- CB Maldives Final 2009 041Dokument43 SeitenCB Maldives Final 2009 041njockaNoch keine Bewertungen
- International Valuation Guidance Note 3 Valuation of Plant and Equipment (Revised 2005)Dokument6 SeitenInternational Valuation Guidance Note 3 Valuation of Plant and Equipment (Revised 2005)KismetNoch keine Bewertungen
- International Valuation Application 1 Valuation For Financial Reporting (Revised 2005)Dokument18 SeitenInternational Valuation Application 1 Valuation For Financial Reporting (Revised 2005)KismetNoch keine Bewertungen
- International Valuation Application 1 Valuation For Financial Reporting (Revised 2005)Dokument18 SeitenInternational Valuation Application 1 Valuation For Financial Reporting (Revised 2005)KismetNoch keine Bewertungen
- Eric Raymond - The Cathedral and The Bazaar - PsDokument35 SeitenEric Raymond - The Cathedral and The Bazaar - PsandrewbatallasNoch keine Bewertungen
- 6 - General Valuation Concepts and PrinciplesDokument27 Seiten6 - General Valuation Concepts and PrinciplesKismet100% (7)
- 11 - GN 5 - Valuation of Personal PropertyDokument20 Seiten11 - GN 5 - Valuation of Personal PropertyKismetNoch keine Bewertungen
- 14 - IVS 3 - Valuation ReportingDokument13 Seiten14 - IVS 3 - Valuation ReportingKismetNoch keine Bewertungen
- 9 - Code of ConductDokument15 Seiten9 - Code of ConductKismetNoch keine Bewertungen
- 10 - GN 1 - Real Property ValuationDokument35 Seiten10 - GN 1 - Real Property ValuationKismet0% (1)
- 12 - GN 6 - Business ValuationDokument8 Seiten12 - GN 6 - Business ValuationKismetNoch keine Bewertungen
- 7 - Valuation ApproachesDokument20 Seiten7 - Valuation ApproachesKismet100% (3)
- The Elliptic Arc, Azimuth, and Chord of A Normal SectionDokument10 SeitenThe Elliptic Arc, Azimuth, and Chord of A Normal SectionKismet100% (2)
- 4 - The Valuation ProcessDokument31 Seiten4 - The Valuation ProcessKismet100% (2)
- 5 - Developing and Communicating The ValuationDokument11 Seiten5 - Developing and Communicating The ValuationKismetNoch keine Bewertungen
- Position Fixing B Y DistanceDokument18 SeitenPosition Fixing B Y DistanceKismetNoch keine Bewertungen
- 1 - Introduction To Properties ValuationDokument13 Seiten1 - Introduction To Properties ValuationKismetNoch keine Bewertungen
- 2 - Concepts and Principles On PropertyDokument5 Seiten2 - Concepts and Principles On PropertyKismetNoch keine Bewertungen
- Lecture 9Dokument8 SeitenLecture 9Kismet100% (2)
- Normal Sections On The EllipsoidDokument8 SeitenNormal Sections On The EllipsoidKismet100% (3)
- GE178 LabExe 3D Conformal TransformationDokument1 SeiteGE178 LabExe 3D Conformal TransformationKismetNoch keine Bewertungen
- 3 - The Four Property TypesDokument28 Seiten3 - The Four Property TypesKismet100% (2)
- Geometric Geodesy Geometric GeodesyDokument10 SeitenGeometric Geodesy Geometric GeodesyKismet100% (1)
- Definitions, Branches, Objectives, Professions and Organizations, History and DevelopmentDokument9 SeitenDefinitions, Branches, Objectives, Professions and Organizations, History and DevelopmentKismet100% (1)
- 1 PBDokument7 Seiten1 PBIndah Purnama TaraNoch keine Bewertungen
- 105 2Dokument17 Seiten105 2Diego TobrNoch keine Bewertungen
- Measurement and Scaling Techniques1Dokument42 SeitenMeasurement and Scaling Techniques1Ankush ChaudharyNoch keine Bewertungen
- Outline Calculus3Dokument20 SeitenOutline Calculus3Joel CurtisNoch keine Bewertungen
- Pelayo PathopyhsiologyDokument13 SeitenPelayo PathopyhsiologyE.J. PelayoNoch keine Bewertungen
- BÀI TẬP LESSON 7. CÂU BỊ ĐỘNG 1Dokument4 SeitenBÀI TẬP LESSON 7. CÂU BỊ ĐỘNG 1Yến Vy TrầnNoch keine Bewertungen
- Paper 1 AnalysisDokument2 SeitenPaper 1 AnalysisNamanNoch keine Bewertungen
- Clint Freeman ResumeDokument2 SeitenClint Freeman ResumeClint Tiberius FreemanNoch keine Bewertungen
- The Comma Rules Conversion 15 SlidesDokument15 SeitenThe Comma Rules Conversion 15 SlidesToh Choon HongNoch keine Bewertungen
- Sainik School Balachadi: Name-Class - Roll No - Subject - House - Assigned byDokument10 SeitenSainik School Balachadi: Name-Class - Roll No - Subject - House - Assigned byPagalNoch keine Bewertungen
- SecurityFund PPT 1.1Dokument13 SeitenSecurityFund PPT 1.1Fmunoz MunozNoch keine Bewertungen
- William Hallett - BiographyDokument2 SeitenWilliam Hallett - Biographyapi-215611511Noch keine Bewertungen
- Community Architecture Concept PDFDokument11 SeitenCommunity Architecture Concept PDFdeanNoch keine Bewertungen
- Literature Review of Service Quality in RestaurantsDokument7 SeitenLiterature Review of Service Quality in RestaurantsuifjzvrifNoch keine Bewertungen
- G1000 Us 1014 PDFDokument820 SeitenG1000 Us 1014 PDFLuís Miguel RomãoNoch keine Bewertungen
- Bossypants Autobiography and Womens SelvesDokument26 SeitenBossypants Autobiography and Womens SelvesCamila Paz GutiérrezNoch keine Bewertungen
- Classification of Books Using Python and FlaskDokument5 SeitenClassification of Books Using Python and FlaskIJRASETPublicationsNoch keine Bewertungen
- Iec Codes PDFDokument257 SeitenIec Codes PDFAkhil AnumandlaNoch keine Bewertungen
- Introduction To Password Cracking Part 1Dokument8 SeitenIntroduction To Password Cracking Part 1Tibyan MuhammedNoch keine Bewertungen
- Caradol sc48 08Dokument2 SeitenCaradol sc48 08GİZEM DEMİRNoch keine Bewertungen
- Matrix PBX Product CatalogueDokument12 SeitenMatrix PBX Product CatalogueharshruthiaNoch keine Bewertungen
- DR S GurusamyDokument15 SeitenDR S Gurusamybhanu.chanduNoch keine Bewertungen
- Aero Ebook - Choosing The Design of Your Aircraft - Chris Heintz PDFDokument6 SeitenAero Ebook - Choosing The Design of Your Aircraft - Chris Heintz PDFGana tp100% (1)
- Notice: Premerger Notification Waiting Periods Early TerminationsDokument5 SeitenNotice: Premerger Notification Waiting Periods Early TerminationsJustia.comNoch keine Bewertungen
- Stonehell Dungeon 1 Down Night Haunted Halls (LL)Dokument138 SeitenStonehell Dungeon 1 Down Night Haunted Halls (LL)some dude100% (9)
- Cambridge IGCSE: CHEMISTRY 0620/42Dokument12 SeitenCambridge IGCSE: CHEMISTRY 0620/42Khairun nissaNoch keine Bewertungen
- Rotating Equipment & ServiceDokument12 SeitenRotating Equipment & Servicenurkasih119Noch keine Bewertungen
- DAA UNIT 1 - FinalDokument38 SeitenDAA UNIT 1 - FinalkarthickamsecNoch keine Bewertungen
- ST3 ManualDokument48 SeitenST3 ManualRon FosterNoch keine Bewertungen
- GLOBE2Dokument7 SeitenGLOBE2mba departmentNoch keine Bewertungen