Beruflich Dokumente
Kultur Dokumente
Guillermojimenezlozano.2009 Parte4
Hochgeladen von
Han Jhov LeoOriginalbeschreibung:
Originaltitel
Copyright
Verfügbare Formate
Dieses Dokument teilen
Dokument teilen oder einbetten
Stufen Sie dieses Dokument als nützlich ein?
Sind diese Inhalte unangemessen?
Dieses Dokument meldenCopyright:
Verfügbare Formate
Guillermojimenezlozano.2009 Parte4
Hochgeladen von
Han Jhov LeoCopyright:
Verfügbare Formate
265
Primer paso: Escoger un nodo arbitrariamente y elegir el ramal que est ms cercano a l.
Segundo paso: Elegir el nodo ms cercano a cualquiera de los nodos ya existentes en el rbol.
Tercer paso: Anular todos los ramales que me puedan crear ciclos al entrar dicho nodo y
volver al segundo paso hasta encontrar el rbol.
De acuerdo a la anterior grfica, el rbol de mnimo recorrido se encuentra constituido por
AD - DC - CE - EH - HJ - J I - CF - FG - BF, lo cual nos da un total de 55 unidades.
Pr obl ema del PERT / CPM / LPU / ROY / RAMPS
Para solucionar los problemas planteados en el Grfico de Gantt se presentan los sistemas de
trayectoria crtica, es decir, PERT, CPM, LPU, ROY y RAMPS.
A mediados de 1957, la E.I. Du Pont de Nemours de los Estados Unidos estaba interesada en
ampliar cerca de 300 fbricas, lo cual implicaba un gran nmero de actividades; pensemos que cada
ampliacin tuviera 100 actividades, esto implicaba 30000 actividades, las cuales no podan ser planeadas
en Grfica de Gantt. Morgan Walker de Du Pont y J ames E. Kelley de la Remington Rand pensaron
que la nica posibilidad era utilizar la computadora e idearon un sistema que denominaron CPM Critical
Path Method (Mtodo del Camino Crtico).
A fines de 1957 la Oficina de Proyectos Especiales de la Armada de los Estados Unidos, fue
encargada de administrar el gran proyecto Polaris. Se trataba de fabricar, probar y dejar en posicin de
combate un cohete balstico llamado Polaris. Dicha Oficina contrat la asesora de las firmas Lockheed
Aircraft y Booz, Alien y Hamilton, para que propusiera mtodos apropiados al control del proyecto con
tan especiales caractersticas de incertidumbre. Este grupo desarroll los procedimientos que dieron
origen al PERT Program Avaluation and Review Technique (Tcnicas de Evaluacin y Revisin de
Programas).
Existe un sistema llamado LPU Lines Points Union (Lneas y Puntos de Unin) desarrollado en
1961 por J ohn W. Fondahl, profesor de la Universidad de Stanford. Este trabajo inicialmente se denomin
Sistema de Actividades en los Nodos; luego la IBM desarroll en base a l un programa llamado
Diagrama de Precedencias. La diferencia fundamental con el CPM / PERT es que este modelo (LPU)
est orientado hacia el proceso manual y no hacia el computador.
En Europa un grupo constituido por ingenieros de los Chantiers de lAtlantique, la SEMA, la
Compagnie des Machines BULL y el Matemtico Francs B. Roy estudi el problema del equilibrado
de las curvas de carga de las diferentes especialidades que intervienen en las operaciones de armamentos
de buques; estos trabajos dieron origen al ROY o Mtodo de los Potenciales. La principal ventaja del
ROY sobre el PERT es que no exige tareas ficticias.
En un afn por sincronizar el mecanismo de la accin empresarial, respondiendo a ese deseo
de mayor orden, mayor productividad y mayor gestin que imponen las nuevas formas de la economa
actual y que viene sintetizado en la llamada gestin integrada, ha surgido el mtodo RAMPS que se
peocupa en coordinar los medios disponibles y las tareas de varios proyectos que se llevan a cabo a
la vez.
Los modelos ms extendidos en cuanto a su aplicacin en nuestro medio y sus principales
diferencias son:
266
PERT
1. Probabilstico.
2. Se basa en eventos.
3. Orientado a quien controla.
4. Se puede utilizar en proyectos
de investigacin.
CPM
1. Determinstico.
2. Se basa en actividades.
3. Orientado a quien ejecuta.
4. Se puede utilizar para todo tipo
de proyecto.
En este momento es importante advertir las ventajas de los sistemas de trayectoria crtica
(PERT / CPM / LPU / ROY / RAMPS) sobre el sistema tradicional de barras (Grfica de Gantt):
Se puede conocer exactamente la secuencia de las actividades.
Podemos analizar el efecto de cualquier atraso o adelanto de una actividad en relacin al
proyecto.
Se pueden estudiar rpidamente diferentes alternativas.
Podemos analizar todas las variables (tiempo, costos, recursos).
Se pueden conocer cules son las actividades que sufriendo retrasos no modifican el proyecto.
La efectividad del sistema es directamente proporcional al nmero de actividades; cuantas
ms actividades existan, ms detalles y ms conocimientos del proyecto tenemos.
Podemos visualizar todos los problemas y situaciones en el papel, antes que ellos ocurran en
la realidad.
Pr obl ema PERT-CPM
Este problema resuelve situaciones atinentes a proyectos. Un proyecto est constituido por las
tareas o actividades (hechos que consumen tiempo) y/o recursos (hechos que consumen dinero). Los
recursos son los elementos necesarios de un proyecto para ejecutar una actividad; estos recursos
pueden ser:
Mano de Obra.
Materiales:
Permanentes; no fungibles (quedan fsicamente en lo que hemos hecho).
Fungibles; dinero, energa utilizada, etc.
Espacio.
Maquinaria.
En todo proyecto el recurso ms importante es el dinero.
267
Entre las actividades existen unas relaciones que nos permiten ordenarlas y representarlas mediante
un grafo valuado G =(X, Y) de dos formas:
1. X : Conjunto de actividades.
Y : Relaciones entre las actividades.
2. X : Conjunto de actividades.
X : Conjunto de elementos X tales que X es el final de una actividad y el comienzo de toda
actividad inmediatamente posterior.
La diferencia entre dos mtodos es que para PERT la duracin de las actividades es aleatoria, de
la que conocemos su ley de distribucin (Distribucin P); se consideran tres clases de tiempos:
T
0
=Tiempo optimista (duracin prevista sin ningn tipo de retraso).
T
n
=Tiempo normal (duracin prevista desde un punto de vista real).
T
p
=Tiempo pesimista (duracin prevista si va mal la actividad en su desarrollo).
De acuerdo a la distribucin P calculamos el tiempo medio de duracin T^, que estar en el
intervalo [T
O
,T
P
J como:
La desviacin estndar nos dice el grado de confiabilidad de la estimacin hecha con T
u
. Luego
calculamos la ruta crtica.
El mtodo CPM considera que conoce exactamente lo que dura cada actividad.
Las convenciones por medio de grafos corresponden a:
268
Luego la varianza y la desviacin estndar corresponden a:
Donde :
TPj : Es el tiempo ms prximo de empezar la actividad i .
TL : Es el tiempo ms lejano de comenzar la actividad i .
U : Es el identifcador del nodo.
K : Es la duracin de la actividad,
i : Es la actividad.
Calculrnoslos T P de la siguiente manera: TP =[TP(i-l)+K.] inicializando TP del nodo
inicial en cero; si un nodo tiene varios predecesores se escoge el valor mayor entre los calculados.
Cuando se llega al nodo final se habr obtenido el tiempo ms prximo de la finalizacin del proyecto.
El clculo de TL; es as: TL = [TL(i +l ) - K ] igualando TL =TP para inicializar TL en
el ltimo grado de grafo. Si un nodo tiene varios sucesores, se escoge el valor de TL (i +l) ms
pequeo; cuando se llegue al nodo inicial se obtendr el tiempo ms tarde de comenzar el proyecto.
Un suceso se dice que es crtico cuando T L - T P =0; la ruta o camino crtico est constituida
por el conjunto de actividades crticas. Holgura total de una actividad es el tiempo que se puede
prolongar dicha actividad sin afectar el tiempo final del proyecto. Holgura libre es el tiempo que se
puede prolongar la actividad sin afectar el suceso. Cuando una actividad tiene una duracin nula se
llama hito.
269
Ejemplo
Se tiene un proyecto de sistematizacin de un Departamento de Programacin:
La representacin del proyecto anterior por medio de un grafo es:
270
271
Ahora se realizar la grfica de tal manera que los nodos sean las actividades.
272
En cualquiera de los dos grafos podemos observar que la duracin del proyecto es de 39 semanas
determinadas a partir de las dos (2) rutas crticas siguientes:
i = 1,2,3,5,8,7, 15, 18, 19.
ii = 1,2,3,5,8,6,9,14,15,18,19.
Las varianzas y la desviacin estndar total de la ruta crtica corresponden a
273
Es decir, el proyecto lo podemos realizar en un intervalo cerrado: [37 , 4l] con una holgura
aproximada de 2 semanas por defecto y por exceso.
El proyecto se puede hacer en 39 semanas con una desviacin a izquierda y derecha de 2 semanas,
o sea, el trabajo deber ser realizado entre 37 y 41 semanas respectivamente.
274
TRAYECTORIAS DE EULER
En honor de Leonhard Euler, se llama una trayectoria de Euler a un camino que recorre todas las
aristas de una grfica conexa.
El p r o b l ema d e l os puent es d e Kni gs ber g
Knigsberg era un puerto de la antigua Alemania (actualmente pertenece a Rusia y se llama
Kaliningrado), situado en la costa sur del mar Bltico, la segunda capital de Prusia, est dividido por el
ro Pregel en cuatro zonas, incluyendo la isla de Kneiphof. Hay siete puentes que conectan las diferentes
partes de la ciudad y hay un acertijo acerca de ellos que intrig grandemente a los ciudadanos de
Knigsberg hace unos doscientos aos.
Dar un paseo por los puentes ha sido siempre un entretenimiento para recreacin de los jvenes.
Segn los viejos relatos, de una manera o de otra se present la pregunta de cunto llevara recorrer los
puentes. Esto condujo a la sorprendente afirmacin de que un recorrido completo de todos los puentes
sin pasar ms de una vez por ninguno de ellos era imposible.
Es un hecho histrico que un comit de jvenes visit a Leonard Euler, el matemtico, en 1735,
para pedirle que resolviera el conflictivo tema. Un ao ms tarde, Euler present un voluminoso informe
a la Academia de Ciencias de San Petersburgo. All afirmaba haber demostrado la imposibilidad de
resolver el problema. Esta conclusin aparece en el informe de la Academia, 1741, Vol. 8, y ha sido
publicada en ingls y francs por renombrados matemticos, ya que se ocupa del principio aplicndolo
a cualquier nmero de puentes.
El profesor W. Rouse Ball, de Trinity College, discute la antigedad y los mritos del problema en
su gran obra Mathematical Recreations, pero se equivoca al adjudicar su origen a Euler en 1736 y hace
la notable afirmacin de que haba y an hay, segn Baedecker, solamente siete puentes. Los registros
ms antiguos se refieren a ocho y el mapa presenta un acertado esquema de Baedecker, quien se
refiere especialmente a los ocho puentes.
275
La cuestin de regresar al punto de partida no forma parte en absoluto del problema. Slo se trata
de demostrar si es posible partir de cierto sitio de la ciudad y llegar a otro sitio pasando una sola vez por
todos los puentes. El problema es decir de cuntas maneras es posible hacerlo y cul es la ruta ms
corta.
En el ao 1935 se construy un nuevo puente, uniendo las reas de tierra B y C. Supongamos que
cada vez que se cruza un puente de la ciudad de Knigsberg se tienen que pagar $1000 y que se
requiere hacer un recorrido cruzando cada puente por lo menos una vez.
i. Existe una caminata?
ii. Describir el recorrido ms barato que comienza y termina en el rea de tierra B.
iii. Describir el recorrido ms barato si se permite empezar y terminar en reas de tierra diferentes.
i. Si existe una caminata; la grfica que se obtiene posee exactamente dos vrtices de grado
impar, los vrtices A y D. Una trayectoria de Euler que comienza en A y finaliza en D es A, B, A, C, A,
Solucin
D, B, C, D.
C
B
276
ii. El recorrido ms barato cuesta $9000; de acuerdo con la grfica del problema, un posible
recorrido que empieza y termina en el rea de tierra B es B, A, C, D, C, A, D, B, A, B. En este
recorrido, tanto el puente CD como alguno de los puentes AB son cruzados dos veces.
C
iii. El recorrido ms barato cuesta $8000. Un posible recorrido que comienza en C y finaliza en A
es B, A, C, D, C, A, D, B, A; en este recorrido el puente CD se cruza dos veces.
TRAYECTORIAS DE HAMILTON
Este problema consiste en encontrar trayectorias que visitan cada vrtice de una grfica
exactamente una vez. Este nombre se debe a que en el ao 1857 el clebre matemtico Irlands
William Rowan Hamilton invent un juego que involucra un dodecaedro regular slido, etiquetado cada
vrtice con el nombre de alguna ciudad importante; el objetivo del juego era que el jugador diseara un
viaje en el que visitara cada una de las veinte ciudades exactamente una vez.
La diferencia entre trayectoria de Euler y trayectoria de Hamilton consiste en la sustitucin de la
palabra arista por vrtice, lo que constituye diferencias sustanciales.
El Pr o b l ema del Ag en t e Vi aj er o
Son problemas en los cuales est involucrada una grfica completa, cuyas aristas se encuentran
etiquetadas con nmeros; una grfica donde sus aristas estn etiquetadas con nmeros se llama grfica
ponderada y a los nmeros se les denomina pesos de las aristas. A estas grficas se les llama grficas
completas ponderadas.
277
El problema matemtico que subyace a toda esta clase genrica de problemas, conocidos como
problemas del agente viajero, se refiere a encontrar un circuito de Hamilton para una grfica completa
ponderada que tenga el menor peso total. El peso total de un circuito es la suma de los pesos de cada
una de las aristas que lo forman.
Los principales algoritmos para resolver el problema del agente viajero son: algoritmo de la fuerza
bruta, algoritmo ambicioso, algoritmo ambicioso repetitivo, algoritmo de mnima conexin.
Al gor i t mo de l a f uer za br ut a
Consiste en hacer una lista de todos los posibles circuitos de Hamilton de la grfica; a continuacin
se calcula el peso total de cada circuito de Hamilton sumando los pesos de todas las aristas del circuito.
Finalmente se encuentra el circuito con el menor peso posible, el cual constituye el circuito de Hamilton
ptimo.
Al gor i t mo ambi ci oso o Al gor i t mo gl ot n o Al gor i t mo del veci no ms
cer cano
Comienza con la eleccin de cualquier vrtice como punto inicial; a partir del vrtice inicial se va
hacia el vrtice cuya arista tenga el menor peso posible, en caso de existir ms de uno, se escoge uno
arbitrariamente; se sigue el proceso en forma sucesiva hasta que todos los vrtices hayan sido escogidos.
Desde el ltimo vrtice se regresa al punto inicial.
Al gor i t mo ambi ci oso r epet i t i vo
Se inicia con la escogencia de cualquier vrtice, al cual se aplica el algoritmo ambicioso y se
calcula el costo total del circuito obtenido; se repite el proceso usando cada uno de los vrtices restantes
de la grfica como vrtice inicial. De los circuitos de Hamilton obtenidos se escoge el mejor; si hay un
vrtice inicial designado se reescribe este circuito con ese vrtice como punto inicial.
Al gor i t mo de m ni ma conexi n
Consiste en elegir la arista de menor peso, en caso de empate se toma una arbitrariamente; se
escoge la siguiente arista disponible de menor peso; se sigue eligiendo la arista que no ha sido tomada
de menor peso, excepto cuando i) se cierra un circuito que no es el final ii) se unen tres aristas en un
slo vrtice. Cuando ya no hay ms vrtices para conectar se cierra el circuito.
Algunos ejemplos de problemas del agente viajero son: procesos industriales, cajeros automticos,
cristalografa de rayos X, transporte y entrega de mercancas por medio de vehculos de transporte
terrestre, circuitos integrados y bodegas automatizadas, entre otros. Ejemplo:
Un agente viajero tiene clientes en cinco ciudades A, B, C, D y E; el agente viajero vive en la
ciudad A y cada mes tiene que viajar a las otras cuatro ciudades para visitar a sus clientes y regresar
a su ciudad A. Los costos son los siguientes: AB $18.500, BC $12.100, CD $17.400, DE $19.900, EA
278
$ 13300, AC $ 11900, AD $ 15200, BD $ 15000, BE $20000, CE $ 12000. El negocio del agente viajero
es de reciente creacin y l sabe que para poder crecer es muy importante gastar lo menos posible
en cada uno de sus viajes. El agente viajero requiere saber cul es la ruta ms econmica que
comienza en su ciudad A, visita cada una de las cuatro ciudades exactamente una vez y regresa
nuevamente a A?
Solucin
Aplicando el algoritmo de la fuerza bruta, el cual consiste en encontrar un circuito de Hamilton
ptimo (con el menor peso total) para la grfica anterior:
Circuitos de Hamilton Costo Total Circuito Reflejado
A, B, C, D, E, A 18500+12100 +17400+19900+13300 =81200 A, E, D, C, B, A
A, B, C, E, D, A 18500+12100 +12000+19900+ 15200 =77700 A, D, E, C, B, A
A, B, D, C, E, A 18500+15000 +17400+12000+13300 =76200 A, E, C, D, B, A
A, B, D, E, C, A 18500+15000 +19900+12000+ 11900 =77300 A, C, E, D, B, A
A, B, E, C, D, A 18500 +20000 +12000 +17400 +15200 =83100 A, D, C, E, B, A
A, B, E, D, C, A 18500 +20000 +19900 +17400 +11900 =87700 A, C, D, E, B, A
A, C, B, D, E, A 11900+12100 +15000+19900+ 13300 =72200 A, E, D, B, C, A
A, C, B, E, D, A 11900+12100 +20000+19900+ 15200 =79100 A, D, E, B, C, A
A, C, D, B, E, A 11900+17400 +15000 +20000+13300 =77600 A, E, B, D, C, A
A, C, E, B, D, A 11900+12000 +20000+15000+15200 =74100 A, D, B, E, C, A
A, D, B, C, , A 15200+15000 +12100+12000+13300 =67600 \. E, C, B, D, A
A, D, C, B, E, A 15200+17400 +12100 +20000+13300 =78000 A, E, B, C, D, A
Al terminar de revisar la lista, se observa que los circuitos ptimos tienen un costo total de
$67.600 correspondientes a los circuitos A, D, B, C, E, A y su circuito reflejado A, E, C, B, D, A.
279
Si empleamos el algoritmo ambicioso, el cual consiste en que el agente viajero al abandonar su
ciudad de residencia A se dirija a la ciudad hacia la cual el costo del viaje es ms barato, y as
sucesivamente hasta llegar a la cuarta ciudad y finalmente regresar a la ciudad de origen A.
El circuito que produce esta estrategia es A, C, E, D, B, A con un costo total de $77300.
Aplicando el algoritmo ambicioso repetitivo, una vez por cada vrtice de la grfica, se obtienen
cinco circuitos de Hamilton de los cuales el mejor es el que utiliza a B como vrtice inicial B, C, A, E,
D, B con un costo total de $72200.
Si trabajamos con el algoritmo de mnima conexin la solucin obtenida es el circuito de Hamilton
A, C, E, B, D, A o el circuito reflejado, el cual nos da un costo total de $74100.
EJERCICIOS PROPUESTOS
Calcule la ruta ms corta en la red siguiente:
280
Encuentre el rbol de expansin mnima en la siguiente grfica:
Calcule el flujo mximo que se puede transportar a travs de:
tiempos (en minutos) y las restricciones de precedencia son:
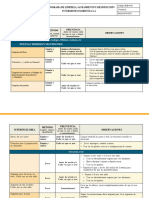
Tarea Descripcin de la tarea Tiem po Tareas precedentes
A Comprar el queso mozzarella 30
B Rayar el queso
5
A
C Batir dos huevos 2
281
Usted y varios amigos van a preparar lasagna para la cena; las tareas que debern realizar, sus
Tarea Descripcin de la tarea Tiempo Tareas precedentes
D Mezclar huevos y queso ricota 3
C
E Picar cebollas y hongos 7
F Cocinar la salsa de tomate 25 E
G Hervir agua en una vasija 15
H Hervir la pasta de lasagna 10 G
I Enjuagar la pasta de lasagna 2
H
J Mezclar los ingredientes 10 I, F, D, B
K Precalentar el homo 15
L Hornear la lasagna 30 J , K
a) Formule este problema como un sistema tipo PERT dibujando la red de proyecto. Utilice un
evento para representar la iniciacin simultnea de las primeras tareas; al lado de cada arco,
identifique la tarea que se realiza; en el otro lado mostrar el tiempo requerido.
b) Encuentre el tiempo ms prximo, el tiempo ms lejano y la holgura para cada evento, al igual
que la holgura para cada actividad. Identificar adems la ruta crtica.
ACTIVIDADES
DURACIONES COSTOS
ACTIVIDADES
Normal Promedio Normal Promedio
1- 2 8 6 200 208
1 - 4 17 13 350 390
2- 3 6 3 130 145
2- 5 12 8 250 274
3- 4 3 2 80 85
3- 5 9 7 100 102
4- 5 2 1 50 54
Los costos indirectos son imputados al proyecto, en su conjunto, estimndose que existe una
relacin lineal de la forma: C=600 +3 * D
p
donde C: Costos indirectos y D
p
: Duracin del proyecto.
Se desea conocer:
a) Duracin y costos normales del proyecto.
b) Duracin del camino crtico irreductible y sus costos asociados.
c) Duracin del proyecto para un costo total mnimo.
282
objeto de utilizar CPM. Los costos de ejecucin del proyecto (en miles de pesos), asi como las duraciones
estimadas de las actividades (en semanas) son las siguientes:
Una empresa quiere realizar un proyecto y para su programacin se incluyen los costos, con el
casas a tres servicios pblicos: agua, electricidad y telefono. Por razones de segundad es necesario
que las conexiones no se crucen entre s. Es posible conectar los servicios de esta manera?
283
Resolver el problema de los servicios pblicos, el cual se refiere a la necesidad de conectar tres
C AP T UL O X
P R O G R A MA C I N N O LI NE AL
"Carecer de libros propios es el colmo de la miseria ".
Benjamn Franklin
INTRODUCCIN
Existen muchos problemas que no pueden ser expresados en trminos de funciones lineales, sino
por medio de funciones no lineales.
Las soluciones a estos problemas son ms dispersas que las de programacin lineal, ya que no
existe un mtodo de solucin general como, por ejemplo, el algoritmo Simplex; por lo tanto existen
soluciones para algunos tipos muy especiales de problemas de programacin no lineal.
El problema general de programacin no lineal es:
Con las siguientes restricciones:
La OPT puede corresponder a un problema de maximizacin o de minimizacin.
En Programacin No Lineal se trabajan en general los siguientes tpicos:
Programacin Clsica Libre
Programacin Clsica con Restricciones
Programacin No Lineal Diferenciable
Programacin No Lineal No Diferenciable
285
PROGRAMACIN CLSICA LIBRE
Este problema consiste en encontrar los valores de las variables X e M
n
que maximiza o minimiza
una funcin f: R " R . La programacin clsica libre se utiliza en formulaciones sencillas, en ciertas
modelizaciones algo ms complejas en las que se presentan restricciones de tipo presupuestal que se
pueden incluir en la funcin objetivo, por ejemplo, en problemas de produccin, cuando el equilibrio de
la unidad econmica de produccin se alcanza cuando el beneficio es mximo.
Ejemplo
OPT f (X, Y) =X
2
+Y
2
Condi ci ones nec es ar i as d e pt i mo l ocal
Condi ci n de pr i mer or den
286
Teorema 1. Si f: ss una funcin de clase uno, la condicin necesaria para que x* sea
un ptimo local es que , es decir, el gradiente de la funcin debe ser igual a cero.
Condi ci n necesar i a de segundo or den
Teorema 2. Consideremos un punto crtico de f en el cual la matriz hessiana
no es la nula. Si x* es un mximo local de f, entonces la forma cuadrtica asociada a
semidefinida negativa.
es
Teorema 3. Consideremos un punto crtico de f en el cual la matriz hessiana
no es la nula. Si x* es un mnimo local de f, entonces la forma cuadratica asociada a H f (x*) es
semidefinida positiva.
Punto de silla: Un punto crtico x* es punto de silla si para todo entorno
y tambin ales que
Ejemplo
Si tenemos la funcin f (X, Y) =X
2
- Y
2
podemos encontrar sus puntos crticos anulando el
es una matriz indefinida, ni mximo,
Condi ci n suf i ci ent e de pt i mo gl obal
287
ni mnimo; con lo cual se concluye que (0, 0) es un punto de silla:
Cuando la matriz hessiana es la matriz nula, podemos estar ante diferentes casos: la matriz hessiana
es nula para ciertos vectores, el estudio de la optimalidad depende de las derivadas de tercer orden y la
matriz hessiana se hace idnticamente nula, en ambos casos se realiza un estudio local de la funcin.
Teorema 8. Si f e C'( R
n
) es una funcin convexa diferenciable y x* un punto crtico, entonces
x* es mnimo global de f. Si f es estrictamente convexa el punto crtico x* es mnimo global nico.
PROGRAMACIN CLSICA CON RESTRICCIONES
Sirve para resolver el siguiente tipo de problemas:
OPT f (X)
Sujeta a:
g(X) =b
289
Condi ci n suf i ci ent e de pt i mo l ocal
Teorema 10. Dado el problema MAX f (x) sujeta a: g (x) =b, en el que las funciones
es un punto crtico de la funcin de Lagrange, la condicin suficiente para que X* sea
mximo local estricto del problema es que la forma cuadrtica relativa a la variable
sea definida negativa respecto a los vectores del plano tangente a la superficie restriccin g (x) =b, es
decir, respecto a los vectores he R" tales que
existe un vector de multiplicadores tal que es un punto crtico de la funcin lagrangeana.
siendo f: funciones diferenciables y m, n finitos y n >m: el
nmero de variables debe ser mayor que el nmero de restricciones; n: nmero de grados de libertad
=n - m.
La programacin clsica con restricciones se utiliza en la mayor parte de los modelos econmicos
(utilidad o produccin sometidas a restricciones presupuestarias).
Funcin de Lagrange: Se define de la siguiente manera:
de Lagrange. El punto crtico de la funcin de Lagrange
gradiente de la lagrangeana.
es el que anula el vector
2S el vector de multiplicadores
Condi ci ones nec es ar i a y suf i ci ent e d e mx i mo l ocal
Condi ci n necesar i a de pt i mo l ocal
Teorema 9. Si X* es un ptimo local del problema de programacin clsica con restricciones
Condi ci n suf i ci ent e de mni mo l ocal
Teorema 11. Dado el problema MIN f (x) sujeta a : g (x) =b, en el que las funciones
es un punto crtico de la funcin de Lagrange, la condicin suficiente para que X* sea
mnimo local estricto del problema es que la forma cuadrtica relativa a la variable X, H
X
L (x*, A,*), sea
definida positiva respecto a los vectores del plano tangente a la superficie restriccin g (x) =b, es decir,
respecto a los vectores h e M
n
tales que h
l
J
g
(X*) =0.
p t i mo Gl o b al
Teorema 12. En los problemas convexos de programacin clsica con restricciones, la condicin
necesaria y suficiente para que X* sea ptimo global es que (x*, 7*) sea punto crtico de la funcin de
Lagrange. Problema convexo: f ha de ser cncava o convexa (mximo/mnimo) y g han de ser funciones
lineales; si f es estrictamente cncava (estrictamente convexa), entonces el mximo (mnimo) global es
nico.
Ejemplo:
OPT f (X, Y) =X -Y
2
Con sus restricciones:
X
2
+Y
2
=4
290
291
P
4
es un mnimo local estricto en
Mximo global en
Mximo local en
Mnimo global en
292
Mnimo global en
Teorema 13 (Teorema de Weierstrass). Sea continua en el intervalo cerrado [a,
b]; entonces, la funcin toma todos los valores entre f (a) y f (b). Una funcin es continua
en un subconjunto D de R si es continua en todos los puntos de D.
293
En otras palabras, si y
0
es un nmero real tal que entonces
Sea X cerrado y acotado, f continua en X, entonces f alcanza un mximo y un
mnimo global en X.
Ejercicios
1. Que significado tiene el multiplicador de Lagrange.
Mide la tendencia de la funcin objetivo o mide el grado de sensibilidad de la funcin objetivo
frente a cambios infinitesimales (desde la interpretacin matemtica de derivada) o cambios unitarios
(bajo la ptica de los problemas econmicos) de la limitacin del recurso i - simo.
Precio sombra-pseudoprecio-costo de oportunidad-valor implcito-costo marginal.
El valor del multiplicador en el ptimo nos indica que si la limitacin del recurso bi =k
b
aumenta una unidad, la funcin objetivo crece en el ptimo y si dicha limitacin disminuye, entonces la
funcin objetivo decrece.
El valor del multiplicador en el ptimo nos dice que si la limitacin del recurso b
2
=k
2
,
aumenta una unidad, la funcin objetivo disminuye en el ptimo y si el recurso se limitara ms, entonces
la funcin objetivo en el ptimo aumentara.
2. Dado el problema MIN f (x), donde f es una funcin convexa en R
n
. Podemos asegurar que
siempre existe mnimo de f ?
Si f es una funcin convexa en R
n
y X* un punto crtico, entonces X* es un mnimo global de f; si f es
estrictamente convexa, entonces el punto crtico X* es un mnimo global nico. Si la matriz hessiana en X*
corresponde a una forma cuadrtica definida positiva, entonces X* es un mnimo local estricto.
PROGRAMACIN NO LINEAL DIFERENCIABLE
Este problema refleja mejor las circunstancias en las que se desenvuelve la actividad econmica.
El problema tipo a resolver es:
MAX f (x)
Con sus restricciones:
Siendo __ funciones diferenciables y b e R
m
.
Suf i ci enci a d e l as Condi ci ones d e Kar ush - Kuhn - Tucker
Teorema 14. En el problema MAX f (x) sujeto a: f es una funcin cncava
diferenciable y g una funcinconvexa diferenciable, Vi =1,2, 3,..., m en el conjunto convexo X.
Supongamos que el punto verifica las hiptesis de cualificacin de las restricciones y adems
las condiciones necesarias de Karush - Kuhn - Tucker, entonces x* es mximo global.
Siendo el conjunto factible.
Teorema 15. En el problema MIN f (x) sujeto a: f es una funcin convexa
294
diferenciable y g una funcinconvexa diferenciable, m en el conjunto convexo X.
Supongamos que el punto verifica las hiptesis de cualificacin de las restricciones y adems
las condiciones necesarias de Karush - Kuhn - Tucker, entonces x* es mnimo global.
Siendo el conjunto factible.
Ejemplos
1. En qu tipo de problemas se deben utilizar las condiciones de Karush-Kuhn-Tucker?
Se debe usar cuando se tiene un problema de optimizacin con restricciones de desigualdades,
considerando que el punto X* verifica las hiptesis de cualificacin de las restricciones.
MI Nf (x)
Sujeta a:
295
MAX f (x)
Con sus restricciones:
MAXf (x)
Sujeta a:
MAXf (x)
Sujeta a:
MI Nf (x)
Con sus restricciones:
2. Calcular el ptimo global del problema:
Con sus restricciones:
Formulamos la funcin de Lagrange:
Aplicamos las condiciones de Karush - Kuhn - Tucker:
1.
2.
3.
Se verifican las hiptesis de cualificacin de las restricciones, ya que el conjunto factible en este
problema es convexo y tiene un interior no vaco.
Realizando las operaciones que aparecen en las seis condiciones, obtenemos:
296
Para resolver este sistema podemos hacerlo de forma secuencial, aplicando las condiciones de
holgura complementaria (tems 2. y 5.), lo que nos lleva a resolver una serie de sistemas ms sencillos
determinados por los posibles valores de las variables. En este problema se pueden plantear hasta 2
3
(porque son tres variables X, Y y ) sistemas que surgen de las siguientes combinaciones:
cuya solucin es:
MAX(X = 0; Y>0; X=0)
297
Escogemos de las ocho ecuaciones el caso 6. : se obtiene el sistema:
Anlisis de la convexidad del problema: La funcin objetivo es una funcin estrictamente cncava,
ya que su matriz hessiana es definida negativa:
La funcin restriccin es convexa, porque su matriz hessiana es semidefinida positiva:
por tanto el conjunto nivel que expresa la restriccin del problema es
convexo; el conjunto factible es convexo por ser interseccin de conjuntos convexos. Por tanto, el
mximo global del problema es nico, como tiene que cumplir las condiciones de Karush - Kuhn -
Tucker, segn la condicin suficiente, est en el nico punto que hemos encontrado
de aplicar otra tcnica para encontrar sus ptimos.
Al g o r i t mo d e L ev en b er g - Mar d q u ar d t
El algoritmo de Levenberg-Mardquardt es un algoritmo iterativo de optimizacin en el que el
mtodo de iteracin presenta una lisera modificacin sobre el mtodo tradicional de Newton. Las
298
PROGRAMACIN NO LINEAL NO DIFERENCIABLE
Si en el problema de optimizacin:
MAX f (X)
Sujeta a:
Siendo f: alguna de las funciones f o g no son diferenciables, hemos
Punto de silla del lagrangeano: El punto es un punto de silla del
lagrangeano del problema anterior si :
ecuaciones normales (donde J representa el J acobiano de la funcin, A los
incrementos de los parmetros y s el vector de errores residuales del ajuste), son reemplazadas por las
ecuaciones normales aumentadas ,donde El valor
de es inicialmente puesto a algn valor, normalmente Si el valor de A obtenido resolviendo
las ecuaciones aumentadas conduce a una reduccin del error, entonces el incremento es aceptado y
es dividido entre 10 para la siguiente iteracin. Por otro lado, si si el valor de conduce a un
aumento del error, entonces es multiplicado por 10 y se resuelven de nuevo las ecuaciones normales
aumentadas, este proceso contina hasta que el valor de encontrado da lugar a un decremento del
error. Este proceso de resolver repetidamente las ecuaciones normales aumentadas para diferentes
valores de hasta encontrar un valor aceptable de es lo que constituye una iteracin del algoritmo
de Levenberg - Mardquardt. En el caso de diferenciacin numrica, cada variable independiente x se
incrementa por turnos en , se calcula es valor de la funcin en el nuevo punto y la derivada se
calcula como un cociente. Buenos resultados han sido encontrados colocando el valor de 8 al mximo
entre En la practica no se aprecia ventaja en usar un mtodo de diferenciacin numrica
o dar una rutina de clculo de la derivada.
Algunos de los principales mtodos de solucin son los siguientes:
La solucin grfica, cuando son mximo tres (3) variables.
Las restricciones son ecuaciones en lugar de desigualdades m <n; lo anterior constituye un
caso de optimizacin clsica y se puede aplicar para su solucin los Multiplicadores de Lagrange.
f (X
b
X
2
, X
3
, , X
n
) es no lineal, pero las g (X], X
2
, X
3
, X
n
) son lineales; para las
anteriores condiciones hay dos (2) casos especiales:
1. Pr o g r amac i n Cuadr t i c a
2. Pr o g r amac i n Convexa Sep ar ab l e
Donde f (X) es una funcin de una sola variable.
La Bsqueda Gradiental para Programacin Convexa, si la funcin lineal es cncava y las
restricciones son convexas.
Restricciones no lineales, pero separables:
Para garantizar una solucin ptima estos problemas deben contener restricciones
299
muy estrictas en las
300
y en la funcin objetivo.
3. La Pr o g r amac i n Geomt r i c a
Los mtodos ms generales de solucin aplicables en programacin no lineal son los Multiplicadores
de Lagrange y Karush - Kuhn - Tucker.
El mtodo de los Mul ti pl i cadores de Lagrange consiste en aplicar la funci n
luego calcular las primeras derivadas parciales, igualarlas a cero
y encontrar el ptimo del problema ; para verificar el mximo o mnimo de la funcin se encuentran las
segundas derivadas parciales.
Las condiciones necesarias de Karush - Kuhn - Tucker tambin son suficientes si la funcin
objetivo y el espacio solucin satisfacen ciertos requerimientos con respecto a la convexidad y a la
concavidad.
Una solucin ptima de un problema de programacin no lineal, corresponde a la solucin ptima
definitiva si existen n nmeros negativos
siguientes:
tales que satisfacen las condiciones
indica que la i - sima restriccin es equivalente a donde es la i - sima
explica que la i - sima restriccin no es limitante a
variable de holgura.
5.
6.
Para definir estas condiciones, definimos el problema de Programacin No Lineal generalizado
como:
OPT Z =f (x)
Sujeto a :
La OPT puede corresponder a una maximizacin o minimizacin y el multiplicador de Lagrange es:
301
Solucin Grfica: Nos permite visualizar el ptimo, pero tiene la desventaja de servir nicamente
para representar pocas variables, hasta tres (3). Ejemplos:
1. MI N W =(X, - 2)
2
+(X
2
- 1 )
2
En esta grfica podemos observar la regin sombreada, la cual es cerrada, acotada, convexa, as
como tambin algunas curvas de nivel.
Este problema posee solucin global en la regin factible; todo mnimo local es global y al verificarse
las condiciones de convexidad, todo punto candidato a mnimo lo es.
Buscamos los puntos candidatos a mnimo Construyendo la funcin de Lagrange:
Las derivadas parciales igualadas a cero son:
302
Sujeto a:
Graficamos:
303
Es decir, al verificar las condiciones del problema
Solucin grfica:
Resolviendo el sistema de cuatro ecuaciones con cuatro incgnitas (primeras derivadas parciales)
obtenemos:
2
3
4
es un mnimo global estricto.
Con sus restricciones:
Construimos la funcin de Lagrange:
304
Sujeta a:
Resolviendo el anterior sistema de ecuaciones (primeras derivadas parciales) llegamos a:
valores que corresponden al mximo propuesto inicialmente.
1
2
3
Formamos los multiplicadores de Lagranee por las restricciones
Aplicando las condiciones de Karush - Kuhn - Tucker el problema se reduce a encontrar la
Calculamos las primeras derivadas:
Calculamos las segundas derivadas:
305
1
2
3
4
solucin del sistema
Por y por el vector de las variables libres por Y; sea:
306
Resolviendo las ecuaciones 1, 2, 3 y 4 llegamos a:
PROGRAMACIN CUADRTICA
Consideremos un problema de programacin no lineal cuya funcin objetivo es la suma de trminos
de la forma
el grado del trmino
Un problema de programacin no lineal, cuyas restricciones son lineales y cuya funcin objetivo
es la suma de trminos de la forma (en la cual cada trmino tiene un grado
de 2, 1 o 0) es un problema de programacin cuadrtica.
Vamos a ilustrar de manera general el mtodo de WOLFE para resolver problemas de
programacin cuadrtica:
Se define un problema de programacin cuadrtica como:
El problema de optimizacin anterior tiene restricciones lineales, si Q es una matriz nula se
convierte en un problema de programacin lineal. Como Q es positiva definida, implica que W es una
funcin estrictamente convexa y por lo tanto el mnimo si existe es global; si Q es negativa definida,
W es estrictamente cncava y si el mximo existe es global.
A continuacin se escribe el problema en notacin algebraica, se le aplican los multiplicadores de
Lagrange, se verifican las condiciones necesarias y suficientes de Karush-Kuhn-Tucker que deben
exi sti r en un nti rno pl obal .
Sujeta a:
Donde (Vector en E
n
con componentes continuas), C es un vector de precios con n
componentes, Q es una matriz de n x n, simtrica y positiva definida, es decir, para toda
excepto X =0, b es el vector de recursos con m componentes, A es una matriz de m * n
coeficientes tecnolgicos y 0 es un vector con n ceros.
El mtodo de Wolfe sigue con la reescritura del problema original como un problema de
programacin lineal con holguras complementarias; este ltimo problema es equivalente al problema
original. El problema de programacin lineal a resolver ser de 2 (m +n) variables, m +n restricciones
lineales y m +n restricciones de holgura complementaria.
Ejemplo
Resolver el siguiente problema de programacin cuadrtica por el mtodo de Wolfe:
Con sus restricciones:
Aplicando los multiplicadores de Lagrange tenemos:
Las primeras derivadas parciales son:
El problema de programacin lineal equivalente al original de acuerdo al mtodo Wolfe es:
Sujeto a:
307
308
Con las siguientes restricciones de holgura complementaria:
Utilizando el mtodo Simplex se tiene que la solucin bsica inicial es:
En la primera iteracin entra X, (n,=0) a la base y sale V, de la base; el punto extremo despus
de iterar es:
En la segunda iteracin entra (es de aclarar que aunque el Simplex escoge
para entrar a la base antes que lo haga no son aceptables, ya que Y, y Y
2
son
positivos). El punto extremo luego de recalcular es:
En la tercera iteracin no pueden entrar a la base son positivas; el
Simplex toma como siguiente candidato a ju, y de salida Y, ; el punto extremo despus de iterar es:
En la ltima iteracin debe entrar pero no puede porque es positivo;
el siguiente elemento a entrar a la base es el cual reemplaza a Luego de recalcular (pivotear)
el punto extremo es:
La solucin anterior corresponde al ptimo:
Algunos mtodos para resolver problemas de Programacin Cuadrdita son: Beale, Hildreth-
D"Esopo, Zheil-Van de Panne, Barankin-Dorgman y Graves-Whinston, entre otros.
Un caso especial de programacin separable ocurre cuando las funciones son convexas,
resultando as un espacio convexo de solucin; adems la funcin es convexa en caso de
minimizacin, y cncava en caso de maximizacin.
No existe un algoritmo nico para solucionar problemas de programacin convexa; en general los
algoritmos conocidos se pueden clasificar as:
1. Algoritmos de gradiente, en estos casos se modifica de alguna manera el procedimiento de
bsqueda del gradiente para evitar que la trayectoria de bsqueda penetre la frontera de
restriccin.
2. Algoritmos secuenciales no restringidos, incluye los mtodos de funcin de penalizacin y de
funcin barrera; estos algoritmos convierten el problema de optimizacin restringida original
en una sucesin de problemas de optimizacin no restringida, cuyas soluciones ptimas
convergen a la solucin ptima del problema original.
3. Algoritmos de Aproximacin Secuencial, incluye mtodos de aproximacin lineal y aproximacin
cuadrtica; estos algoritmos sustituyen la funcin objetivo no lineal por una sucesin de
aproximaciones lineales o cuadrticas. Para problemas de optimizacin linealmente restringidos,
estas aproximaciones permiten la aplicacin repetida de los algoritmos de programacin lineal
o cuadrtica.
A continuacin resolvemos un problema de programacin separable aplicando el mtodo de la
base restringida.
PROGRAMACIN SEPARABLE
Una funcin es separable si se puede expresar como la suma de n
funciones de una sola variable, , es decir,
Con sus restricciones:
309
El mtodo de aproximacin nos sugiere que las variables separables son:
tienen puntos de ruptura (K
2
=4), como X
2
<3, entonces:
310
Las funciones se dejan como estn (son lineales);
Luego:
Entonces el problema original por aproximacin se convierte en:
Sujeto a:
1.
2.
El tablero simplex inicial corresponde a:
Donde S, es una variable de holgura (relleno).
La solucin ptima por el Simplex a este problema equivalente es:
Luego el ptimo en trminos de
PROGRAMACIN GEOMTRICA
La Programacin Geomtrica es una tcnica de optimizacin aplicable a problemas de
programacin que impliquen funciones de una forma matemtica especial, llamada posinomios; se
define un posinomio como: donde
Ejemplo:
La Programacin Geomtrica soluciona un caso especial de problemas de Programacin No
Lineal. Este mtodo resuelve al considerar un problema dual asociando a los siguientes tipos de
Programacin No Lineal:
311
Pr o b l ema Geomt r i c o No Rest r i ngi do
Pr o b l ema Geomt r i c o Rest r i ngi do
signo, las funciones W y W
0
toman la forma de un polinomio. La Programacin Geomtrica fue
diseada por Duffn, Peterson y Zener.
La lgica de la Programacin Geomtrica se basa en la desigualdad de Cauchy-Schwarz
(desigualdad de media aritmtica-geomtrica):
Es decir,
312
supone para ambos casos n, m y p son finitas, los exponentes no tienen restricciones de
Donde aj son los coeficientes positivos, m es el nmero de variables y n el nmero de trminos.
Generalmente, el nmero de trminos determina el nmero de factores de peso, y el nmero de variables
independientes seala el nmero de ecuaciones.
Cuando n =m +1, se dice que el problema tiene cero grados de dificultad.
Cuando n - (m + 1) >0, es un problema que no se puede resolver mediante Programacin
Geomtrica. Finalmente se resuelven los sistemas de ecuaciones simultneas planteadas y se obtiene
la solucin del problema. Ejemplo:
1. Encontrar la cantidad econmica de pedido de un producto, es decir, se debe decidir qu
cantidad del artculo conviene almacenar peridicamente; los costos totales asociados al producto y su
almacenamiento se pueden expresar como:
Donde:
CT Costo total.
CCI Costo cargado al inventario.
CHP Costo total de pedidos.
VC Valor de compra.
Q
Cantidad econmica de pedido.
H Costo de almacenamiento por unidad anual.
A Costo de hacer un pedido.
D Consumo promedio al ao.
K ,P Constantes.
313
El mtodo de solucin consiste en calcular las primeras derivadas parciales de W y W
0
; de la
funcin objetivo se obtiene la ecuacin:
condicin de normalidad.
De las primeras derivadas parciales iguales a cero se escribe la relacin:
condicin de ortogonalidad.
La funcin objetivo tiene la siguiente frmula general:
Luego
1
2
De tal modo que al resolver el anterior sistema de ecuaciones simultneas llegamos a que p, =p
2
y la variable Q* debe ser tal que haga que los dos trminos de la funcin objetivo sean iguales:
Aparte de los mtodos de solucin para problemas de Programacin No Lineal ya mencionados,
algunos de los conocidos son:
Tcnicas de Bsqueda Unidimensional: Minimax, Bsqueda Simultnea: Dos Experimentos,
Bsqueda Simultnea: n Experimentos, Resolucin, Distinguibilidad, Escalamiento, Bsqueda
Secuencial, Mtodo de Bolzano, Bsqueda por Bloques, Bsqueda en Bloques Pares, Bsqueda
Dicotmica, Bsqueda de Fibonacci, Bsqueda con Resolucin Desconocida, Bsqueda de Seccin
urea, Bsqueda de Fibonacci Inverso y Bsqueda Mediante Bloques Impares, entre otros.
Tcnicas de Bsqueda Multidimensional: algunos modelos son: Eliminacin Multivariate,
Mtodos Geomtricos, Mtodos Lgicos, Bsqueda Aleatoria, Procedimientos de Aproximacin
Estocsticos, Bsqueda en Forma de Malla, Mtodo de Bsqueda Patrn: Hooke-J eeves,
Mtodo de Interpolacin Cuadrtica de Powell, Mtodo del Ascenso Acelerado, Mtodo de
Newton-Raphson, Mtodo de Davidon-Fletcher-Powell, Mtodo de Broyden-Fletcher, Mtodo
de Fletcher-Reeves, Mtodo de Smith.
314
Otros mtodos: mtodo de Levenberg - Marquardt, Cuasi - Newton, Gradiente Conjugado,
Subgradiente, Zoutendijk, Programacin Sucesiva Lineal (PSL), Programacin Sucesiva Cuadrtica
(PSC), Rosen, Zangwill y Tcnica de Minimizacin Secuencial No Restringida (SUMT), entre otros.
ALGUNOS PROGRAMAS DE COMPUTADORA
NOMBRE AUTOR
1. MTODOS DE BSQUEDA
OPTIM Boas
Bsqueda Secuencial Cooper
COMPLEX Davies
Rosenbrock Davies
Tcnica de suma multigradiente Himmelblau
CANDI DE Himmelblau
Bsqueda Simplex Miller
PROBE Sullivan
2. MTODOS DE GRADIENTE CON RECORRIDOS CORTOS
POP/360 Colville
Pivote gradiental Greenstadt
POP 11/7094 Grigsby
Paquete de optimizacin Carburo Hutton
Bsqueda del gradiente generalizado Kephart
Mtodo de programacin aproximado Miller
Ascenso deflectado Miller
3. MTODOS DE GRADIENTE CON RECORRIDOS LARGOS
Gradiente generalizado reducido Abadie
GRGII Abadie
Direcciones factibles Anthony
Davidon con CRST Davies
Programacin convexa Gauthier
Gradiente conjugado Goldfarb
Gradiente Reducido Huard
Proyeccin de gradiente corregido Kalfon
Gradiente proyectado Miller
Proyeccin de la variable mtrica Murtagh
Gradiente revisado reducido Ribiere
Direcciones factibles modificadas Zzchach
315
4. MTODOS QUE USAN HESSIANAS
Gauss - Newton - Carroll
SUMT
SOLVER
Bard
MCcormick
Wilson
5. OTROS
Programacin separable
Mtodo de centros
QSB
LINDO/LINGO
WINQSB
CPLEX
GAMS
XPRESS
MATHEMATICA
MATLAB
Harvey
Huard
Chang / Sullivan
Schagre
Yih - Long Chang
ILOG
GAMS Software GmbH
Dash Optimization
Wolfram Research
The Mathworks Inc
Es importante aclarar que existen estudios comparativos de algoritmos en los cuales se analiza el
nmero de iteraciones en la obtencin de un ptimo local y su respectivo tiempo de computadora; estos
estudios corresponden a Colville, Holzman y Stocker. Algunos mtodos como los de tolerancia flexible
(Paviani - Himmelblau) han resultado ser bastante eficientes en la prctica; los resultados de los estudios
de los algoritmos concluyeron que los mtodos que mejor se pueden aplicar en la prctica por orden de
importancia son:
1. Mtodo Generalizado de Reduccin de Gradiente (Abadie/Carpentier)
2. Mtodo de Tolerancia Flexible (Paviani - Himmelblau)
3. Tcnica de Minimizacin Secuencial No Restringida -SUMT- (Fiacco/Mccormick).
4. Mtodo de Aproximacin Lineal de Smith (Smith).
5. Mtodo Generalizado de Bsqueda de Gradiente de Cross y Kephart (Cross/Kephart).
procesos productivos consecutivos. En el primero de ellos se obtienen a partir de las materias primas,
los productos intermedios E y F segn la funcin:
EJERCICIOS PROPUESTOS
316
Para la produccin de un bien X a partir de las materias primas A, B, C y D son necesarios dos
En el segundo proceso productivo se obtiene el artculo X a partir de E y F segn la funcin:
X =Q
2
(E, F) =e
E+F
317
a) Calcular la productividad marginal del factor B en la produccin intermedia del factor E.
b) Calcular la productividad marginal del factor intermedio E en la produccin final.
c) Calcular la productividad marginal del factor A y del factor C en la produccin final.
En una fbrica el costo de poner en marcha las mquinas es directamente proporcional al
numero de maquinas empleadas; el costo de operacin es inversamente proporcional al nmero de
mquinas utilizadas. Demuestre que cuando el costo total es mnimo, el costo de puesta en marcha es
igual al costo de operacin.
Un consumidor con renta $7 puede adquirir dos bienes A y B; si X y Y son el nmero de
unidades compradas de cada uno de los bienes, su renta se distribuye segn la funcin g (X, Y) =
X +Y
2
y la funcin de utilidad viene dada por u (X, Y) =4 X +16 Y. Calcular el valor mximo de la
funcin de utilidad para dicho consumidor.
Un fabricante con derechos exclusivos sobre una nueva maquinaria industrial planea vender
una cantidad limitada de sta y calcula que si se suministran X mquinas al mercado nacional y Y al
mercado extranjero, las mquinas se vendern a
mercado nacional y a
a) Cuntas mquinas debera suministrar el fabricante a cada mercado para obtener el mayor
ingreso total posible?
b) Cuntas mquinas debera suministrar a cada mercado para obtener el mayor ingreso total
posible si est obligado a servir un total de 1150 mquinas?
Una empresa produce un bien A a partir de dos factores productivos F. y F
2
, segn la funcin
de produccin Q (X, Y) =X Y, donde X y Y son respectivamente, las cantidades utilizadas de F] y F
2
en
el proceso. La funcin de costo es C (X, Y) =3 X +2 Y. Determinar las cantidades X y Y que
minimizan el costo para una produccin fija de 600 unidades del bien A.
unidades monetarias cada una en el extranjero.
unidades monetarias cada una en el
318
C AP T UL O XI
P R O G R A MA C I N DI N MI C A
"De ah que siga siendo algo sublime el llegar a ser maestro,
cosa enteramente distinta de ser un docente afamado". Martn Heidegger
INTRODUCCIN
La Programacin Dinmica debe su desarrollo en gran parte a Richard Bellman (1950) y consiste
en una tcnica que permite determinar de manera eficiente las decisiones que optimizan el
comportamiento de un sistema que evoluciona a lo largo de una serie de etapas. En otras palabras,
trata de encontrar la secuencia de decisiones que optimiza el comportamiento de un proceso polietpico.
La naturaleza del racionamiento que se debe realizar en Programacin Dinmica es muy diferente
al de la Programacin Lineal. La Programacin Lineal, intenta describir una determinada situacin en
trminos de un modelo matemtico determinado; una vez conocida la naturaleza de las variables de
decisin y expresadas la funcin objetivo y las restricciones en funcin de esas variables, la solucin del
modelo puede confiarse, sin mayores dificultades, a un programa informtico. La Programacin Dinmica
no admite una solucin sistemtica de este tipo; ms que un modelo concreto, es una estrategia de
solucin comn a muchas situaciones en principio diferentes entre s. Adems, es frecuente que la solucin
del modelo est muy relacionada con la situacin que se ha de modelizar. En contrapartida, las
simplificaciones que en ocasiones deben realizarse en Programacin Lineal para poder resolver el modelo
no son necesarias en Programacin Dinmica, la cual admite gran variedad de relaciones entre variables.
Los elementos principales para trabajar en Programacin Dinmica son: procesos polietpicos de
decisin, etapas, estados, variables de decisin, descomposicin, problemas de decisin en una o en n
etapas y funcin de recurrencia. La Programacin Dinmica se clasifica en Programacin Dinmica No
Homognea y Programacin Dinmica Homognea (horizonte finito o infinito), Programacin Dinmica
Determinstica y Programacin Dinmica Estocstica. Las Cadenas de Markov con remuneracin y
decisin son un caso particular de Programacin Dinmica Estocstica Homognea en el tiempo.
Pr ocesos pol i et pi cos d e deci si n
Las situaciones susceptibles de ser representadas mediante Programacin Dinmica pueden
describirse como procesos polietpicos de decisin. El problema suele dividirse en etapas, en cada una
de las cuales debe tomarse una decisin; conocemos la solucin del problema cuando conocemos la
decisin ptima para cualquier situacin que pueda presentarse en el desarrollo de un sistema. La
Programacin Dinmica va asociada a situaciones de evolucin que se van desarrollando a lo largo de
varias etapas (de ah su carcter dinmico). En la mayora de las ocasiones, se tratar de representar
el comportamiento de un sistema que evoluciona a lo largo del tiempo; en otros casos, se trata de
decisiones en las que las decisiones se toman de manera simultnea en el tiempo, pero en las que se
319
evalan las decisiones de manera secuencial. La diferencia con la Programacin Lineal, es que en esta
ltima las decisiones se toman de manera simultnea (aunque en ocasiones se representan sistemas
que evolucionan a lo largo del tiempo, como los planes de produccin).
Al comenzar cada una de las etapas, antes de tomar la decisin, el sistema podr encontrarse en
un estado de los varios posibles para esa etapa; lo anterior significa que para cada etapa debe definirse
un conjunto de estados; el estado debe sintetizar toda la informacin que debemos conocer de la
evolucin del sistema en las etapas anteriores; los estados posibles para una etapa no tienen por qu
ser los mismos que para las etapas siguientes (aunque s deben definirse de la misma manera: los
estados aseguran la continuidad entre una y otra etapa) y el nmero de estados puede ser finito o
infinito.
Una vez tomada la decisin en el estado correspondiente, el sistema evolucionar hacia alguno de
los estados posibles para la etapa siguiente; por lo tanto, el comportamiento del sistema puede percibirse
como una secuencia de decisiones y evoluciones; dicha evolucin puede ser conocida con certeza, una
vez tomada la decisin (tendremos una situacin de Programacin Dinmica Determinstica) o bien el
sistema puede evolucionar hacia diferentes estados, segn una ley de probabilidad conocida (siendo
entonces Programacin Dinmica Estocstica).
El objetivo de la Programacin Dinmica es encontrar la poltica ptima para cada una de las
etapas de la evolucin del sistema; la poltica para una determinada etapa es la decisin ptima en cada
uno de los posibles estados del sistema en dicha etapa. Para cada etapa debe definirse una variable de
decisin Xn; si el sistema tiene k estados en esa etapa, una poltica ser un vector de k componentes,
cuya componente i - sima es el valor de la variable de decisin para el estado e en la etapa n.
La esencia de la estrategia de la Programacin Dinmica se expresa mediante el principio de
Optimalidad de Bellman:
En un modelo de Programacin Dinmica, la poltica ptima para las etapas que faltan hasta la
finalizacin del proceso es independiente de las polticas adoptadas en las etapas anteriores. Esta
propiedad es la esencia de la Programacin Dinmica.
Descomposi ci n
Se denomina a un problema de optimizacin susceptible de descomposicin si puede resolverse
por optimizacin recursiva a travs de n etapas, efectundose la optimizacin en cada etapa sobre una
variable de decisin. En otras palabras, un problema se puede descomponer en subsistemas y su
sintetizacin vuelve a generar el sistema original.
El pr obl ema de deci si n de una et apa o de N et apas
En una etapa cualquiera del sistema se identifican los siguientes elementos: un vector de entrada,
un vector de salida, un conjunto de decisiones, una transformacin y un vector de medida de eficiencia
del sistema.
320
El vector de entrada proporciona toda la informacin de las componentes importantes del sistema,
antes de tomarse una decisin; el vector de salida brinda toda la informacin de las componentes
importantes del sistema, despus de tomarse una decisin; el conjunto de decisiones son los instrumentos
utilizados para alcanzar los objetivos del sistema; la transformacin relaciona la salida en funcin de la
entrada y las decisiones; el vector de medida de eficiencia del sistema es una funcin en trminos de la
entrada, la salida y la decisin que se toma. Cuando el problema es de n etapas es repetir el proceso
anterior en forma secuencial.
La Funci n Recur si va
El objetivo es descomponer un problema de optimizacin de n etapas; se presenta el modelo de
formulacin recursiva (la solucin secuencial recursiva se hace del vector de entrada al vector de
salida, es decir, de izquierda a derecha) y el modelo de funcin de recursiva (la solucin secuencial
recursiva se hace del vector de entrada al vector de salida, es decir, de derecha a izquierda). Algunos
problemas de Programacin Dinmica solo pueden ser resueltos en uno de esos sentidos, pero la gran
mayora se pueden solucionar de ambas maneras.
Car act er st i cas gener al es de l os pr obl emas de Pr ogr amaci n Di nmi ca
El problema se divide en etapas, con una decisin requerida en cada etapa.
Cada etapa tiene algunos estados asociados.
El efecto de una decisin en cada etapa es transformar el estado corriente (actual) en uno
asociado con la prxima etapa.
Dado el estado corriente, la poltica ptima para las etapas que quedan es independiente a la
poltica adoptada en etapas anteriores; en este caso etapa anterior quiere decir, en tiempo, no
en el proceso de decisin.
El procedimiento comienza por escoger la decisin (poltica) ptima para cada estado de la
ltima etapa.
Una relacin recursiva puede derivarse, la cual identifica la decisin ptima para cada estado
cuando quedan n etapas.
Usando una relacin recursiva, el mtodo de solucin mueve hacia atrs (hacia delante) etapa
por etapa, determinando la decisin ptima a cada etapa hasta llegar a la etapa inicial (final).
321
EJERCICIOS RESUELTOS
dest i no son f i j os, el vi aj er o debe escoger los t er r enos por donde at r avesar . El vi aj er o debe
at r avesar cuat r o et apas desde el or i gen en A hast a el dest i no en J; el vi aj er o debe est ar l o ms
segur o posi bl e en el vi aj e, l uego de los of r eci mi ent os de pl i zas de seguros par a el vi aj e; el costo
de cada pl i za se basa en una cui dadosa eval uaci n de l a segur i dad de l a r ut a. La rut a ms
segur a ser aquel l a con pl i za de segur o de vi da ms bar at o.
Qu r ut a mi ni mi zar el costo t ot al de l a pl i za?
en el punt o S (est ado) y escoge a X
n
como su dest i no i nmedi at o. Dados S y n, sea X el val or de
322
Sea el costo t ot al de l a mej or pl i za par a las l t i mas n et apas, dado que el vi aj er o est
X
n
que opt i mi za a as que par a nuest ro caso el obj et i vo es encont r ar
y el val or de su cor r espondi ent e pl i za. Debemos encont r ar sucesi vament e
Cuando el vi aj er o t i ene una et apa ms par a r ecor r er , su r ut a ser:
Un vi aj er o t i ene que at r avesar t er r i t or i os hosti l es en una di l i genci a; el punt o de par t i da y de
al si t i o 5, el m ni mo costo t ot al ser: f
3
(2, 5) = C25 + f * (X3) = 7 + 4 11; X
3
= 5. Si est en 2
y deci de ir a 6, el m ni mo costo ser : C26 = 4 ms el mni mo despus de 6: f
3
(2, 6) = C26 + f *
(X3) = 4 + 7 = 11; X
3
= 6. Si est en 2 y deci de ir a 7, el m ni mo costo ser : C
2
7 = 4 ms el
m n i mo despus de 7: f
3
(2, 7) = C27 + f* (X
3
) = 6 + 6 = 12; X
3
= 7. El mni mo costo t ot al desde
el est ado 2 en adel ant e es f
3
(2) = 11 y el dest i no i nmedi at o ser : X
3
= 5 o X
3
= 6.
As umamos que el vi aj er o est en 3 y deci de ir a 5, el m ni mo costo t ot al ser : C35 = 3 ms el
m n i mo despus de 5: f
3
(3, 5) = 3 + 4 = 7; X
3
= 5. Si est en 3 y escoge ir a 6, el mni mo costo
323
Cuando el vi aj er o t i ene dos et apas ms par a r ecor r er , l a sol uci n ser :
Si el vi aj er o est en 5 t i ene que ir a 8 a 9, con costos de 1 y 4 r espect i vament e; si escoge 8, el
m ni mo costo adi ci onal despus de est ar en 8 es 3; l a r el aci n recursi va ser :
Ent onces el vi aj er o debe escoger l a ci udad 8, que l e da el costo m ni mo t ot al par a ir ent r e 5 y 10,
as:
Asuma que el vi aj er o est en 6, t i ene que ir a 8 a 9 con costos de 6 y 3. Si escoge 8, el m ni mo
cost o adi ci onal , despus de est ar en 8 es 3; as que: f
2
(6, 8) = 6 + 3 = 9; X
2
= 8; si escoge 9,
el m ni mo costo adi ci onal , despus de est ar en 9 es 4; as que: (6, 9) = 3 + 4 = 7; X = 9;
ent onces el menor val or desde 6 hast a 10 es por 9:
Asuma que el vi aj er o est en 7, t i ene que ir a 8 a 9 con costos de 3 y 3. Si escoge 8, el mni mo
cost o adi ci onal , despus de est ar en 8 es 3; as que: 2 (7, 8) = 3 + 3 = 6; X
2
= 8; si escoge 9,
el m ni mo costo adi ci onal , despus de est ar en 9 es 4; as que: 2 (7, 9) = 3 + 4 = 7; X
2
= 9;
escogi endo el pt i mo t enemos:
En est e caso Si el vi aj er o est en el si ti o 2 y escoge ir i nmedi at ament e
Obser vando el pr obl ema de 4 et apas, el costo de l a pl i za pt i ma nos da el dest i no i nmedi at o
y es nuev ament e, l a suma del costo de l a pl i za en l a pr i mer a et apa ms el mni mo costo
post er i or .
Asuma que el vi aj er o est en 1 y deci de ir a 2; el costo mni mo ser: C12 = 2 ms el mni mo
Ent onces l a sol uci n pt i ma ser :
324
Los r esul t ados par a el pr obl ema de tres et apas son:
La sol uci n pt i ma en el denomi nado pr obl ema de l a di l i genci a es ml t i pl e; exi st en t res r ut as
con un costo mni mo de $11.
uvas f rescas; l a di st r i buci n de vent as pot enci al es de l as uvas ant es que se daen es di f er ent e
en l as cuat r o t i endas; ent onces el pr opi et ar i o desea saber cmo debe si t uar las seis canast as,
en l as cuat r o t i endas, buscando maxi mi zar l a gananci a esper ada. Por r azones admi ni st r at i vas,
el pr opi et ar i o no qui er e di vi di r canast as ent r e t i endas, per o l est di spuest o, si es necesar i o, a
no dej ar canast as en cual qui er t i enda.
La var i abl e de deci si n X
n
, n = 1, 2, 3, 4 cor r esponde al nmer o de canast as si t uadas en l a
i -si ma et apa, es deci r, que se dej an en l as t i endas, cont ando desde el f i nal . Se consi der a que
el est ado del si st ema es l a cant i dad de canast as an di sponi bl es, que no han si do dej adas en
l as t i endas que se vi si t ar on ant es. Si pl ant eamos est e pr obl ema, como uno de Pr ogr amaci n
Li neal , si endo P (X) l a gananci a esper ada al dej ar X canast as en l a t i enda i:
325
Con sus rest ri cci ones:
f
n
(S, X
n
) es l a gananci a asoci ada con l a pol t i ca pt i ma, dado que hay S canast as di sponi bl es
par a n t i endas r est ant es y X
n
es l a cant i dad de canast as que se ha deci di do dej ar .
La f unci n obj et i vo ser:
ent onces l a r el aci n recursi va es:
Cu an d o n = 1 t enemos que
Comenzamos con l a l t i ma et apa n = 1 y segui mos haci a at r s hast a l l egar a l a pr i mar a et apa
n = 4:
El pr opi et ar i o de una cadena de cuat r o t i endas de vveres ha compr ado seis canast as de
El est ado en una et apa par t i cul ar es i gual al est ado en l a et apa pr ecedent e menos l a deci si n
(cant i dad de canast as asi gnadas) en esa et apa.
En est e pr obl ema de l as canast as exi st en ocho sol uci ones pt i mas ml t i pl es:
peso de 10 uni dades; hay cuat r o cl ases de art cul os con sus cuat r o pesos y val or es uni t ar i os
r espect i vos; el pr obl ema consi st e en maxi mi zar l a car ga del bar co.
326
Se est car gando un bar co con var i as cl ases de ar t cul os; el bar co t i ene una capaci dad de
Ar t cul o Peso (P) Val or ($)
1 2 4
2 3 6
3 4 8
4 5 9
El pr obl ema se puede expr esar de l a si gui ent e maner a por Pr ogr amaci n Li neal :
Par a el ar t cul o 2:
327
Suj et a a:
Par a el ar t cul o 1 :
Para el art cul o 3:
Para el ar t cul o 4:
Para est e pr obl ema de l a car ga del barco se obt i enen l as si gui ent es cinco sol uci ones pt i mas
ml t i pl es, con f * (10) = 20:
vi aj e debe regresar al punt o de par t i da; supongamos una red de cinco ci udades, cuyas l ongi tudes
de vi aj e se muest r an en l a mat r i z si gui ent e:
Def i ni mos f (i; J
n
, J
2
, ... , J
p
) = M ni mo costo de ir de la ci udad 1
328
Un agent e vi aj er o debe vi si tar n ci udades par t i endo de una ci udad or i gen y al f i nal del
a l a ci udad i ut i l i zando l as ci udades Ji , J2, ... , J
p
donde J|< = 2, ... , N; ent onces:
De acuer do con l a r el aci n recursi va ant er i or se t i ene:
De l a mi sma f or ma:
De i gual f or ma:
329
donde : or r esponde a l a r ut a ms cor t a si n ut i l i zar ci udades i nt er medi as.
Par a el caso de t res ci udades i nt er medi as se t i ene:
Par a encont r ar l a r ut a ms cort a empl eando dos ci udades i nt er medi as se t i ene:
En f or ma si mi l ar se consi guen:
Para ir de l a ci udad 1 a l a ci udad 2 se pueden ut i l i zar l as ci udades i nt er medi as 3, 4 5; por l o
t ant o:
sol ament e 12 hor as que puede dedi car a est udi ar ; cr ee que es ms ef ect i vo est udi ar en bl oques
de cuat r o hor as y est di spuest o a dedi car cual qui er nmer o de bl oques a las mat er i as con el
f i n de maxi mi zar su pr omedi o acadmi co. El est i ma que l as not as obt eni das segn el t i empo
dedi cado son las si gui ent es:
Cul debe ser l a pol t i ca del al umno?
Sea N
SXn
l a not a obt eni da por el est udi ant e si est udi a X
n
hor as par a l a mat er i a n.
Mat er i a W:
330
Un al umno t i ene que pr esent ar exmenes f i nal es en tres mat er i as U, V y W, per o t i ene
La rut a de mni mo costo que vi si ta t odas las ci udades y r egr esa al punt o de or i gen es 5; ent onces
l a r ut a es 1 - 3 - 5 - 4 - 2 - 1 . Se puede obser var que el nmer o de rutas posi bl es par a el
pr obl ema del agent e vi aj er o es (n - 1) !.
Luego, despus de los cl cul os ant er i or es:
Mat er i a V:
Mat er i a U:
Sol uci n p t i ma:
Est udi ar 4 hor as par a l a mat er i a U, 0 horas par a l a asi gnat ur a V y est udi ar 8 horas par a l a
mat er i a W.
vent as que puede asi gnar a tres r egi ones di sti ntas del pas. Ha deci di do que cada r egi n debe
t ener por l o menos un agent e y que cada agent e i ndi vi dual debe quedar rest ri ngi do a una de
est as r egi ones, per o ahor a qui er e det er mi nar cunt os agent es debe asi gnar a las respecti vas
r egi ones con el f i n de maxi mi zar l as vent as.
La si gui ent e t abl a da el i ncr ement o est i mado de las vent as en cada r egi n si se l e asi gnan
di f er ent es cant i dades de agent es.
Resol ver el ant er i or pr obl ema const ruyendo las t abl as nor mal es par a: n = 1, n = 2 y n = 3.
331
El ger ent e de vent as de una edi t or i al de l i bros de textos uni versi t ari os t i ene seis agent es de
Sol uci ones p t i mas Ml t i pl es :
La di st r i buci n de pr obabi l i dad est i mada par a las vent as pot enci al es de las fresas ant es de que
se echen a per der di f i er e ent r e los tres super mer cados. El pr opi et ar i o qui er e saber cmo debe
asi gnar l as ci nco car gas a las t i endas par a maxi mi zar l a gananci a esper ada. Por r azones
admi ni st r at i vas, no qui er e di vi di r las cargas ent r e las t i endas; sin embar go, est de acuer do en
asi gnar cer o car gas a cual qui er a de el l as; l a si gui ent e t abl a pr opor ci ona la gananci a est i mada
en cada t i enda al asi gnar di sti ntas cant i dades de cargas:
332
El pr opi et ar i o de una cadena de tres super mer cados compr ci nco cargas de fresas frescas.
Det er mi ne cunt as car gas deben asi gnar se a cada t i enda par a maxi mi zar l a gananci a t ot al
esper ada.
sus t r es pr oduct os mas i mpor t ant es; como los t res son bast ant e di t er ent es, cada est uer zo de
publ i ci dad est ar dedi cado a un sol o pr oduct o; se di spone de un t ot al de $6000000 par a est a
c amp a a de publ i ci dad y se supone que el gast o par a cada pr oduct o deber ser un nmer o
ent er o mayor o i gual a 1; el Vi cepr esi dent e de Mer cadot ecni a ha est abl eci do el obj et i vo como
si gue: det er mi nar cunt o gast ar en cada pr oduct o con el f i n de maxi mi zar l as vent as t ot al es. La
si gui ent e t abl a da un i ncr ement o est i mado en vent as par a los di f er ent es gast os de publ i ci dad:
333
Un a compa a est pl aneando una est r at egi a de publ i ci dad dur ant e el ao pr xi mo par a
Gas t o en p u b l i c i d ad
Pr oduct os
Gas t o en p u b l i c i d ad
1 2 3
1 7 4 6
2 10 8 9
3 14 11 13
4 17 14 15
el ecci n est par ej a; uno de los candi dat os t i ene sufi ci entes f ondos para compr ar t i empo de
t el evi si n por un t ot al de cinco comerci al es en horas de mayor audi enci a en estaci ones l ocal i zadas
en cuat r o r eas di f er ent es; con l a i nf or maci n de las encuest as se hi zo una est i maci n del
nmer o de vot os adi ci onal es que se pueden ganar en l as di f erent es r eas de di f usi n, segn el
334
Una campaa pol t i ca se encuent r a en su l t i ma et apa y las encuestas i ndi can que la
nmer o de comer ci al es que se cont r at en. Estas est i maci ones se dan en l a si gui ent e t abl a en
mi l es de vot os:
Det er mi ne cmo deben di st ri bui rse los ci nco comer ci al es ent r e l as cuat r o r eas con el f i n de
maxi mi zar el nmer o est i mado de vot os ganados.
335
Consi der e un si st ema el ect rni co que consta de cuat r o component es, cada uno de los
cual es debe t r abaj ar par a que el si stema f unci one; l a conf i abi l i dad de ste se puede mej or ar si
se i nst al an var i as uni dades par al el as en una o ms de las component es; la si gui ent e t abl a
muest r a l a pr obabi l i dad que las respecti vas component es f unci onen si consi sten en una, dos o
tres uni dades par al el as:
Un i d ad es
p a r al el as
Pr o b ab i l i d ad d e f u n c i o n ami en t o
Un i d ad es
p a r al el as
Co mp o n en t e 1 Co mp o n en t e 2 Co mp o n en t e 3 Co mp o n en t e 4
1 0, 5 0,6 0, 7 0, 5
2 0, 6 0, 7 0, 8 0, 7
3 0, 8 0,8 0, 9 0,9
La pr obabi l i dad que el si st ema f unci one es el product o de las pr obabi l i dades que las respecti vas
component es f unci onen. En l a si gui ent e t abl a se da el costo (en mi l es de pesos) de i nst al ar una,
dos o tres uni dades par al el as en las respecti vas component es:
Un i d ad es
Cost os
p ar al el as Co mp o n en t e 1 Co mp o n en t e 2 Co mp o n en t e 3 Co mp o n en t e 4
1 1 2 1 2
2 2 4 3 3
3 3 5 4 4
Dadas l as l i mi t aci ones de presupuest o, se puede gast ar un mxi mo de $1000000. Det er mi ne
cunt as uni dades par al el as deben i nst al arse en cada una de las cuat ro component es par a
maxi mi zar l a pr obabi l i dad que el si stema f unci one.
Sea X
n
el nmer o de uni dades par al el as a ser i nstal as en el component e n; sea P
n
(X
n
) l a
pr obabi l i dad que el component e f unci one si t i ene X
n
uni dades par al el as; sea C
n
(X
n
) el costo de
i nst al aci n de X
n
uni dades en el component e n; sea S
n
el di ner o (en mi l es de pesos) que puede
ser gast ado.
Sea
336
Para cuat r o component es n = 4:
Para t res component es n = 3:
Par a dos component es n = 2:
337
donde
Para un component e n = 1:
As, l a sol uci n pt i ma es X, = 3; X
2
= 1; X
3
= l ; X
4
= 3 con una f i abi l i dad del si st ema d
0, 3024.
y quiere asignar el tiempo que tiene para estudiar de la manera ms eficiente posible; necesita por lo
menos un da para cada curso y quiere concentrarse slo en un curso cada da por lo que quiere asignar
uno, dos, tres o cuatro das a cada curso. Como hace poco tom un curso de Investigacin de
Operaciones, ha decidido aplicar programacin dinmica para hacer estas asignaciones que maximicen
el total de puntos obtenidos en los cuatro cursos; estima que las distintas opciones en das de estudio le
representarn puntos de calificacin segn la siguiente tabla:
Nmero de das
Cursos
Nmero de das
1 2 3 4
1 3 5 2 6
2 5 5 4 7
3 6 6 7 9
4 7 9 8 9
artculos del ao prximo; por ahora debe tomar una decisin en cuanto a qu productos comercializar
y a qu niveles de produccin. La preparacin de la produccin de dos de estos productos requerir un
costo fijo sustancial, como lo muestra la tabla, adems de los otros datos:
338
Una estudiante universitaria tiene siete das para preparar los exmenes finales de cuatro cursos
El gerente de una compaa est estudiando tres nuevos productos posibles para las lneas de
que tiene que ser resuelto antes que el hombre pueda viajar en forma segura hasta Marte. Actualmente
hay tres equipos de investigadores intentando resolver el problema; se estima que bajo las circunstancias
actuales, la probabilidad que los respectivos equipos, llamados A, B y C fracasen, es 0,4, 0,6 y 0,8
respectivamente; entonces la probabilidad actual que los tres equipos fallen es 0,192. Puesto que el
obj etivo es minimizar esta probabilidad, se ha decidido asignar dos cientficos ms entre los tres equipos,
buscando bajar esa probabilidad tanto como sea posible; en la tabla se da la probabilidad estimada que
los respectivos equipos fallen si se le agregan a cada equipo 0, 1 2 cientficos adicionales. Cmo
deben ser repartidos los cientficos entre los equipos?
subdesarrollados del mundo. Dispone de cinco brigadas mdicas para asignarlas a tres de estos pases
con el fin de mejorar el cuidado de la salud, la educacin para la salud y los programas de capacitacin.
Entonces, el consejo necesita determinar cuntas brigadas debe asignar (si lo hace) a cada uno de
estos pases para maximizar la medida de eficiencia de las cinco brigadas. Los equipos deben mantenerse
como estn formados por lo que el nmero asignado a cada pas debe ser un entero.
La medida de desempeo se tomar en trminos de los aos de vida adicionales por persona. (Para
un pas especfico, esta medida es igual al incremento en el promedio de vida esperado en aos, multiplicado
por su poblacin.) En la tabla se dan las estimaciones de estos aos de vida adicionales por persona (en
mltiplos de 1000) para cada pas y para cada nmero posible de brigadas mdicas asignadas.
Cul es la asignacin que maximiza la medida de desempeo?
339
Slo se pueden vender tres unidades del producto 1, mientras que es posible la venta de todas las
unidades de los otros dos productos que se pueden fabricar. El objetivo es determinar el nmero de
unidades que deben fabricarse de cada producto para maximizar la ganancia total (ingreso neto total
menos costos fijos).
Un proyecto espacial del gobierno conduce una investigacin sobre cierto problema de ingeniera
Una organizacin mundial de salud se dedica a mejorar la atencin mdica en los pases
Una joven emprendedora experta en estadstica cree haber desarrollado un sistema para ganar
un popular juego en un casino. Sus colegas no piensan que este sistema sea tan bueno, por lo que le
apuestan que si comienza con tres fichas, ella no tendr al menos cinco fichas despus de tres jugadas.
Cada jugada incluye apostar cualquier cantidad de las fichas disponibles y ganar o perder este mismo
nmero de fichas. La joven cree que su sistema le dar una probabilidad de ganar una jugada dada.
Suponiendo que la experta en estadstica est en lo correcto, se quiere usar programacin dinmica
para determinar su poltica ptima sobre cuntas fichas apostar (si apuesta) en cada una de las tres
jugadas. La decisin en cada jugada deber tomar en cuenta los resultados de las jugadas anteriores.
El objetivo es maximizar la probabilidad de ganar la apuesta hecha a sus colegas.
C AP T UL O XI I
MO DE L O S DE I NVE NT AR I OS
'La Universidad saca a la luz todas las capacidades, incluyendo la incapacidad".
A. Chjov.
INVENTARIOS
Lo que se debe comprar y cmo lo debo de hacer de acuerdo a las necesidades de la Empresa
(teniendo en cuenta oferta y demanda), los inventarios sirven para desacoplar las diferentes fases,
para que ninguna dependa de la otra; para ello se deben tomar dos decisiones:
Cunto debo comprar, se deben tener en cuenta los costos cargados al inventario, costos por
pedidos (llamadas, papelera) y costos por agotamiento de existencias.
Cundo debo comprar, se deben manejar las existencias de seguridad, as como el tiempo de
entrega de los diferentes pedidos.
Can t i d ad Econmi ca d e Pedi do (CEP)
Es el tamao de la orden que disminuye al mnimo el costo total anual (o el perodo que la empresa
trabaje) de mantenimiento de inventario y el costo de los pedidos.
Si t uaci n i d eal
Cuando el tiempo de entrega de mis pedidos es constante, conocida y cuando tambin la demanda
es constante y conocida.
Cantidad
341
Cantidad econmica de pedido (cantidad de costos mnimos).
Consumo promedio anual.
Inventario promedio.
Costo de hacer un pedido.
Valor unitario de compra.
Costos cargados al inventario en porcentaje del inventario promedio.
FIGURA N2
342
Donde CT es costo total, CCI corresponde a costos cargados al inventario en pesos, CPP es
costos por pedidos y VC es el valor de compra.
Calculamos la primera y la segunda derivada del costo total (CT) con respecto a la cantidad
econmica de pedido(Q):
A continuacin graficamos los costos totales en trminos de los costos cargados al inventario, los
costos por pedidos y el valor de compra con la abscisa cantidad y la ordenada costos:
Ahora vamos a calcular a
Problema: Se tienen unos requerimientos anuales en la Empresa Manizales para el artculo X
iguales a 800000 unidades; el costo de hacer un pedido es de $1250; el costo cargado al inventario es
del 20% anual y el valor unitario de compra anual es de $100. Cunto debo pedir? Nmero de
pedidos anuales?
Cunto dura un pedido?
Solucin:
R =800.000 unidades / ao; S = $1250 / pedido; I =0,2 ; C =$100/pedido ;
Q* =?; N =?; d =?
COMPRAS EN GRANDES CANTIDADES
Es indudable que la mayora de empresas prefieren comprar volmenes altos de mercancas con
el objeto de obtener una mayor utilidad en sus ventas, ya que reciben frecuentemente rebajas y/o
descuentos. Algunos de los criterios utilizados son:
1. Enf oque d e c o mp ar ac i n d e cost os
Consiste en comparar los costos totales de nuestra situacin actual con los costos totales que nos
causara un descuento.
Problema: una Compaa compra algunas materias primas para usarlas en su lnea de produccin
en una cantidad de 400 al ao con un costo de $5000 cada una; los costos cargados al inventario son del
20% del valor promedio de inventario y los costos de pedido son de $2000 por pedido. La empresa ha
recibido una propuesta de otro proveedor para concederle un descuento del 2% en compras de 100 o
ms unidades. Debe aceptar la oferta?
Solucin:
R =400 unidades / ao; C =$5000 / unidad; I =0,2; S =$2000 / pedido;
343
N =80 pedidos al ao
Q* = 10000 unidades/pedido
Si el ao tiene 360 das, entonces un pedido dura:
D =0,02 en compras de ms de 100 unidades; CT
A
=?; CT
D
=?
Situacin Actual:
VC =C * R; VC =5000 * 400; VC =$2'000000
CT
a
=$20000 +$20000 +$2'000000; CT
A
=$2'040000
Situacin propuesta (con descuento):
CCI =50 * 5000 * 0,98 * 0,02; CCI =$49.000
CPP =4 * 2.000; CPP =$8.000
VC =400 * 5.000 * 0,98; VC =$1'960.000
CT
d
=$49.000 +$8.000 +$1'960000; CT
D
=$2'017.000
Debo aceptar esta oferta.
2. Enf oque d e c ambi o d e pr eci os
Hay ahorros en el valor de compra (AD) y en los costos por pedidos (A).
Existen recargos en los costos cargados al inventario (R); A >R acepto la propuesta; A <R no
aceptamos la propuesta; A =R da lo mismo aceptar una cualquiera de las propuestas, habra que
observar algunas condiciones adicionales.
X : Mximo valor en pesos que podemos comprar, de tal manera que A=R si se compra ms se
incrementan los costos y se rebajan los costos cuando se realiza la operacin contraria; A: Consumo
promedio anual en pesos; B: Cantidad econmica de pedido en pesos.
X =f (A, B, S, I, D)
344
AHORROS:
Problema: La Compaa Caldas compra materia prima para su produccin industrial; actualmente
compra $4obooooo al ao de dicho producto; su proveedor le ha hecho una proposicin que consiste en
el 1,25% de descuentojti le hace un pedido trimestral; la empresa ha calculado que el costo de hacer un
pedido es de $2250 por pedido y que los costos cargados al inventario son del 22%. Debe aceptar la
oferta de descuento; si la respuesta es negativa qu contrapropuesta debe hacerle en trminos de
algn descuento?
345
Ahorros =VC +CPP
RECARGOS:
RECARGOS =CCI
Ahorros =Recargos
Despejando X tenemos:
Solucin:
A =$40'000000; D =0,0125; N =4 pedidos / ao; S =$2250 / pedido;
I =0,22; B =?;X =?;x =?
A =C * R; B =C * Q;
Reemplazando 1) en 2) y despejando D, :
Luego no aceptamos la oferta.
por pedido.
Entonces X, =$ 9.415 por pedido corresponde a lo mximo que podemos comprar con descuento,
x =Exigencia
B =$ 2860 por pedido
X, = $ 9415 por pedido; X
2
=$ 859 por pedido (Este ltimo resultado se desecha).
1)
2)
346
El anterior sera el descuento mnimo a aceptar, ya que el proveedor nos haba ofrecido un descuento
de 1,25% si le hacamos un pedido trimestral.
3. Enf oque d e r eb aj a d e pr eci os
Nos permite analizar aquellas situaciones en las cuales nos dan una escala diferencial de precios,
bien sea de tipo ascendente o descendente, de acuerdo a las cantidades que compremos cada vez.
Para el anlisis de los problemas es usual utilizar el siguiente diagrama de flujo: Donde n corresponde
al nivel de menor precio (mayor cantidad), R
Pn
es el lmite inferior del nivel n
DIAGRAMA DE FLUJ O
347
Probl ema: a la Compaa Colombia se le ha ofrecido una escala de descuentos para el producto
X; el costo de pedidos es de $80 por pedido, el costo cargado al inventario es del 22% y el consumo
anual es de 5000 unidades; la escala de descuentos es la siguiente:
Qu cantidad se debe comprar?
Solucin:
R =5000 unidades / ao; S =$ 25 / pedido; I =0,22; CEP =?
Q, =269 unidades por pedido
Q
2
=272 unidades por pedido
Q
5
=284 unidades por pedido
Es decir, escogemos Q
3
=276 unidades por pedido, ya que es la nica que se encuentra en el
intervalo correspondiente a la escala del nivel 3 de los descuentos ofrecidos por el proveedor (dicho
intervalo est entre 200 y 3C$inidades).
348
Q
4
=279 unidades por pedido
Q
3
=276 unidades por pedido
Aplicando el segundo enfoque:
Exi st enci as d e s eg u r i d ad (Z)
Su finalidad es subsanar las deficiencias que se tienen en la entrega de proveedores y/o incrementos
en la demanda, es decir, cmo se deben calcular las existencias de seguridad y en qu momento se
deben hacer los pedidos.
donde MP: Momento de pedido, TR: Tiempo de reposicin y CPD: Consumo promedio diario.
349
Desechamos el ltimo resultado por la definicin de la variable X =$ 149159
X =f ( A, B, D, I, S)
A =R * C; A =5000 * 47,7; A =238500
B =Q * C; B =276 * 47,7; B =13165
En este caso tomamos como respuesta el costo total ms bajo $227982, el cual nos dice que
debemos comprar en la escala correspondiente a 401 o ms unidades.
El clculo de las existencias de seguridad se debe realizar de tal manera que nos cause los costos
mnimos, tanto en costos cargados a las existencias de seguridad como en los costos por agotamiento.
Problema: Se ha comprobado que para el artculo A la cantidad econmica de pedido es de 250
unidades con un promedio diario de consumo de 5 unidades, el tiempo de reposicin es de 21 das; el
nmero ptimo de pedidos al ao es de 5 y el costo por agotamiento es de $3000 por unidad; los costos
cargados al inventario son de $400 por unidad. Se tiene la siguiente historia de perodos de renovacin
(se analizaron 100 perodos de renovacin):
Consumo durante el perodo
de renovacin (unidades)
Nmero de veces que se
present dicho consumo
Probabilidad que se presente
dicho consumo (%)
90 7 0,07
95 10 0,1
100 25 0,25
105 50 0,5
110 6 0,06
115 2 0,02
A qu valor deben corresponder las existencias de seguridad y cul es el momento adecuado
para pedir?
21 *5 +Z =105 +Z; suponiendo Z =0, la situacin de arranque es de 105 unidades.
Z =0; momento de pedido =105 unidades; probabilidad de agotamiento =8%
Z =5; momento de pedido =110 unidades; probabilidad de agotamiento =2%
Z =10; momento de pedido=l 15 unidades; probabilidad de agotamiento= 0%
Se debe escoger cuando Z =5, es decir, cuando existan 110 unidades en bodega es el momento
ideal de pedido.
350
Das könnte Ihnen auch gefallen
- Precios de transferencia: análisis de la validez empírica de los métodos propuestos por la OCDE para la evaluación del principio de plena competenciaVon EverandPrecios de transferencia: análisis de la validez empírica de los métodos propuestos por la OCDE para la evaluación del principio de plena competenciaNoch keine Bewertungen
- Tema 04 Programacion y Control de ProyectosDokument113 SeitenTema 04 Programacion y Control de ProyectospajedrezNoch keine Bewertungen
- Monografia de Macroeconomia CDokument13 SeitenMonografia de Macroeconomia CJota BeNoch keine Bewertungen
- Programacion de ObrasDokument12 SeitenProgramacion de ObrasLuis Aldahir Cabrera HuamanNoch keine Bewertungen
- 18 Planificacion Obras 19 20 ROY PERT Costes Nivelacion ControlDokument76 Seiten18 Planificacion Obras 19 20 ROY PERT Costes Nivelacion ControlLuis Enrike Coari BaezNoch keine Bewertungen
- Metodo PrecedenciasDokument21 SeitenMetodo PrecedenciasKayser Guillermo GNoch keine Bewertungen
- 3 Flujo - Congestionamiento - VehicularDokument57 Seiten3 Flujo - Congestionamiento - VehicularAndy Muñoz DuranNoch keine Bewertungen
- Trabajo de Investigacion de EconomiaDokument28 SeitenTrabajo de Investigacion de EconomiaJonathanArandaANoch keine Bewertungen
- Libro Infraestructura ResilienteDokument40 SeitenLibro Infraestructura ResilienteMiguel Angel Velasquez MinaNoch keine Bewertungen
- Analisis - Flujo - Vehicular (1) Clase 4aDokument25 SeitenAnalisis - Flujo - Vehicular (1) Clase 4aBrandon SandovalNoch keine Bewertungen
- 00 PPT-plantilla PPT 2023Dokument29 Seiten00 PPT-plantilla PPT 2023Santos Varela AuroraNoch keine Bewertungen
- Analisis Técnicos de Las Alternativas de Un PipDokument54 SeitenAnalisis Técnicos de Las Alternativas de Un PipMarioCesarHuallancaContrerasNoch keine Bewertungen
- PlanificaciónDokument60 SeitenPlanificaciónmartin_rrNoch keine Bewertungen
- PIF Contabilidad de ActivosDokument10 SeitenPIF Contabilidad de ActivosLaura Daniela Gutierrez MancholaNoch keine Bewertungen
- La Constitución Política Del Perú Previo A 1993Dokument19 SeitenLa Constitución Política Del Perú Previo A 1993Diego Andrés Lazo QuispeNoch keine Bewertungen
- Formulacion Proyecto RiegoDokument19 SeitenFormulacion Proyecto RiegoFritz J. SumarrivaNoch keine Bewertungen
- Solicita Apoyo Con Refrigerio Por Realización de FaenaDokument1 SeiteSolicita Apoyo Con Refrigerio Por Realización de FaenaDERECHOS HUMANOS COMISARIA PNP SATIPONoch keine Bewertungen
- Deber de Pavimento #2Dokument4 SeitenDeber de Pavimento #2Jamil J SaenzNoch keine Bewertungen
- Bases Del 4to Concurso de Canto y PoesiaDokument4 SeitenBases Del 4to Concurso de Canto y PoesiaJulio Elmer Flores JilaNoch keine Bewertungen
- Titulo I de La Persona y de La SociedadDokument9 SeitenTitulo I de La Persona y de La SociedadChristianParedesParedesNoch keine Bewertungen
- ServiciosDokument10 SeitenServiciosChristian ReaNoch keine Bewertungen
- Caratula de Monografia CivilDokument1 SeiteCaratula de Monografia CivilAwkiNoch keine Bewertungen
- SPP Madereras Nativas Norte PeruDokument12 SeitenSPP Madereras Nativas Norte PeruJuan LinaresNoch keine Bewertungen
- Anulacion de NotasDokument1 SeiteAnulacion de NotasYerson Huayllani CondoriNoch keine Bewertungen
- Analisis Tecnico de AlternativaDokument25 SeitenAnalisis Tecnico de AlternativaHector Ernesto Bejar Jeri100% (1)
- El Flujo VehicularDokument15 SeitenEl Flujo VehicularDiego BecerraNoch keine Bewertungen
- Ejemplo Prog. Pert CPM BDokument29 SeitenEjemplo Prog. Pert CPM Braul hernan copari coloradiNoch keine Bewertungen
- Informe TopográficoDokument18 SeitenInforme TopográficoDreitaMonzonNoch keine Bewertungen
- Desensamble y Ensamble Computador de MesaDokument21 SeitenDesensamble y Ensamble Computador de MesaAlex FrancoNoch keine Bewertungen
- Entrega 3 - Pensamiento Estrategico y Prospectiva FDokument16 SeitenEntrega 3 - Pensamiento Estrategico y Prospectiva FFabián ParraNoch keine Bewertungen
- Pip-Riego Tecnifado ParobambaDokument130 SeitenPip-Riego Tecnifado Parobambacharly010170Noch keine Bewertungen
- Teoria de Costos, Economia y Deseconomia de EscalaDokument4 SeitenTeoria de Costos, Economia y Deseconomia de EscalaAlberto Javier Lopez ArriojaNoch keine Bewertungen
- Ruta Crítica y HolgurasDokument16 SeitenRuta Crítica y HolgurasJeison Aliaga MedinaNoch keine Bewertungen
- Calculo FeriaDokument10 SeitenCalculo FeriaJavier riveros yauriNoch keine Bewertungen
- Teoría Del Flujo Vehicular - Modelos - AnálisisDokument50 SeitenTeoría Del Flujo Vehicular - Modelos - AnálisismificameNoch keine Bewertungen
- Análisis-Microeconomico Empresa Gama Sa 2017Dokument19 SeitenAnálisis-Microeconomico Empresa Gama Sa 2017Gaby ObandoNoch keine Bewertungen
- Programa de Gobierno ZipacónDokument25 SeitenPrograma de Gobierno ZipacónMonica OrozcoNoch keine Bewertungen
- Norma e 070 Capitulo 1+20Dokument11 SeitenNorma e 070 Capitulo 1+20Nordith Corali Donayre GuillenNoch keine Bewertungen
- Costos Por Ordenes y Procesos 2 FinalDokument16 SeitenCostos Por Ordenes y Procesos 2 FinalFabioBurgosNoch keine Bewertungen
- Teoria de Costos PDFDokument15 SeitenTeoria de Costos PDFCamilaMorenoNoch keine Bewertungen
- E3 RegresiónDokument24 SeitenE3 RegresiónBryan Gallegos SegoviaNoch keine Bewertungen
- PRACTICO No. 2 DSE LA VAN Y LA TIR EXCELDokument5 SeitenPRACTICO No. 2 DSE LA VAN Y LA TIR EXCELNorma LamasNoch keine Bewertungen
- Planeacion Del DesarrolloDokument23 SeitenPlaneacion Del DesarrollolomabajoNoch keine Bewertungen
- Congestion Vehicular EnsayoDokument12 SeitenCongestion Vehicular EnsayoCRISTHNoch keine Bewertungen
- Metodo de La Parabola de Segundo Grado Crecimiento PoblacionalDokument2 SeitenMetodo de La Parabola de Segundo Grado Crecimiento PoblacionalFredy Ponceca AncaNoch keine Bewertungen
- Modelo ProbitDokument10 SeitenModelo ProbitEunice E. LeañosNoch keine Bewertungen
- Historia de La Computacion Power Point 2013Dokument21 SeitenHistoria de La Computacion Power Point 2013Angel Javier Flores AceitunoNoch keine Bewertungen
- S04.s1 - MATERIAL - MEDIDAS DE DISPERSIÓN - EDYP - CGT - UTP - HHBL - 2021Dokument28 SeitenS04.s1 - MATERIAL - MEDIDAS DE DISPERSIÓN - EDYP - CGT - UTP - HHBL - 2021jesus hector inofuente alemanNoch keine Bewertungen
- Cálculo de TIR y VAN para Decisión de Inversión: Período Flujo de Fondos Flujo de FondosDokument1 SeiteCálculo de TIR y VAN para Decisión de Inversión: Período Flujo de Fondos Flujo de FondospadmeNoch keine Bewertungen
- Movimiento en Tres DimensionesDokument24 SeitenMovimiento en Tres DimensionesHarrison CamiloNoch keine Bewertungen
- 04 Emulsiones AsfalticasDokument51 Seiten04 Emulsiones AsfalticasGILBERTO BALLÓN BACANoch keine Bewertungen
- Tema 1 Ejercicios Resueltos PDFDokument24 SeitenTema 1 Ejercicios Resueltos PDFAna MiyarNoch keine Bewertungen
- Informe de Santo Tomas1 PDFDokument81 SeitenInforme de Santo Tomas1 PDFOrlando BarrigaNoch keine Bewertungen
- Analisis Critico Articulo CientíficoDokument3 SeitenAnalisis Critico Articulo CientíficoRodrigo ReneNoch keine Bewertungen
- Arbol de Problemas - Proyecto de Inversion FinalDokument4 SeitenArbol de Problemas - Proyecto de Inversion FinalJack FloresNoch keine Bewertungen
- Concepto de ProyectoDokument8 SeitenConcepto de Proyectomartin araucoNoch keine Bewertungen
- Glosario de Propiedades GenexusDokument12 SeitenGlosario de Propiedades GenexusJosé Luis Bravo CarpioNoch keine Bewertungen
- Mecanismos de Financiamiento para Pymes A Través Del Mercado de ValoresDokument90 SeitenMecanismos de Financiamiento para Pymes A Través Del Mercado de ValoresJaime Dunn De AvilaNoch keine Bewertungen
- Guillermojimenezlozano.2009 Parte4 PDFDokument85 SeitenGuillermojimenezlozano.2009 Parte4 PDFyeisson konnichiwaNoch keine Bewertungen
- Plantilla PERT CPM SIDokument38 SeitenPlantilla PERT CPM SIMariu GuerreroNoch keine Bewertungen
- DISEÑO DE REFUERZOS DE PAVIMENTOS FLEXIBLES POR EL METODO Del Instituto de Asfalto.Dokument13 SeitenDISEÑO DE REFUERZOS DE PAVIMENTOS FLEXIBLES POR EL METODO Del Instituto de Asfalto.David ValenciaNoch keine Bewertungen
- Diapositivas AltimetríaDokument37 SeitenDiapositivas AltimetríaCésar Augusto Valdiviezo100% (1)
- Refraccion y ReflexionDokument6 SeitenRefraccion y Reflexionyorleany mendoza100% (1)
- Cuestionario ACDokument5 SeitenCuestionario ACDiegoFernandoCristanchoNoch keine Bewertungen
- Practica 1Dokument11 SeitenPractica 1Jonathan IturraldeNoch keine Bewertungen
- Copia de Planilla-De-Excel-De-Calculo-De-Punto-De-EquilibrioDokument9 SeitenCopia de Planilla-De-Excel-De-Calculo-De-Punto-De-EquilibrioANA KAREN NAVARRETE MORALESNoch keine Bewertungen
- Cronograma de Limieza y DesinfecciónDokument7 SeitenCronograma de Limieza y DesinfecciónStella de Jesus Bermudez de MuñozNoch keine Bewertungen
- Guia Del VNR PDFDokument262 SeitenGuia Del VNR PDFAnonymous lJH3zzNoch keine Bewertungen
- UntitledDokument73 SeitenUntitledneeskens001Noch keine Bewertungen
- Sismos en BoliviaDokument3 SeitenSismos en BoliviaAriel Alberto Choque AlbaNoch keine Bewertungen
- 43 Boletin AccidentesDokument1 Seite43 Boletin AccidentesDaniel Lopez DiazNoch keine Bewertungen
- MonococcionDokument31 SeitenMonococcionsergio leon gomezNoch keine Bewertungen
- p7 Maxima Transfer en CIA de Potencia en Circuitos de CorrientDokument22 Seitenp7 Maxima Transfer en CIA de Potencia en Circuitos de CorrientEmilio Ruben Delgado SolorioNoch keine Bewertungen
- Catlogo General Segurestil 2018Dokument112 SeitenCatlogo General Segurestil 2018Gala ViolinNoch keine Bewertungen
- Rivas 07 Distribuciones Muestrales 2020Dokument56 SeitenRivas 07 Distribuciones Muestrales 2020Quinio Bruno Espiritu EugenioNoch keine Bewertungen
- Vías FérreasDokument6 SeitenVías FérreasurelheNoch keine Bewertungen
- MisionesDokument48 SeitenMisionesNicolás BorgmannNoch keine Bewertungen
- CCNA2 Lab 3 1 3 EsDokument6 SeitenCCNA2 Lab 3 1 3 EsAlcides GuerreroNoch keine Bewertungen
- Informe de VolatilizacionDokument2 SeitenInforme de VolatilizacionMamani WilliamNoch keine Bewertungen
- El Portal Zapotlanejo Julio 2010Dokument12 SeitenEl Portal Zapotlanejo Julio 2010El Portal ZapotlanejoNoch keine Bewertungen
- Acu Agua PotableDokument61 SeitenAcu Agua PotablePabel Condori RomeroNoch keine Bewertungen
- Sistema de Acondicionamiento de AireDokument6 SeitenSistema de Acondicionamiento de AireJessire ColinaNoch keine Bewertungen
- 8 Componentes OEEDokument1 Seite8 Componentes OEEArellano SamuelNoch keine Bewertungen
- Normas Cirsoc-303Dokument146 SeitenNormas Cirsoc-303IVAN SAAVEDRA TNoch keine Bewertungen
- Unidad #4 Oficina de OperacionesDokument19 SeitenUnidad #4 Oficina de OperacionesFederico Di LucaNoch keine Bewertungen
- Practica AdcDokument19 SeitenPractica Adccesar A. Lucas GarciaNoch keine Bewertungen
- Sistemas de Información GeográficaDokument1 SeiteSistemas de Información GeográficaAlexander Cobeñas AcuñaNoch keine Bewertungen
- Tarea 3 YacimientosDokument9 SeitenTarea 3 Yacimientosjoshua diaz villegasNoch keine Bewertungen
- Dedi Catori ADokument4 SeitenDedi Catori AJaimeGuevaraRiosNoch keine Bewertungen