Das könnte Ihnen auch gefallen
- Tutorial On PLCDokument33 SeitenTutorial On PLCmanojnancyNoch keine Bewertungen
- Introduction To PLCsDokument49 SeitenIntroduction To PLCsvishwa9Noch keine Bewertungen
- PLC Manual Guide to Programmable Logic ControllersDokument78 SeitenPLC Manual Guide to Programmable Logic ControllersAbid ParwezNoch keine Bewertungen
- Introduction To PLCsDokument42 SeitenIntroduction To PLCsArun Kumar YadavNoch keine Bewertungen
- PLCDokument39 SeitenPLCVishwadhar ShreedharNoch keine Bewertungen
- Unit 3 System Interfacing and ControllersDokument48 SeitenUnit 3 System Interfacing and ControllersSrinivasan V PNoch keine Bewertungen
- SCADA PaperDokument15 SeitenSCADA Paperprashantbgpatel1Noch keine Bewertungen
- Programmable Logic ControllerDokument23 SeitenProgrammable Logic Controllergebrerufael hailayNoch keine Bewertungen
- PLC GUIDEDokument51 SeitenPLC GUIDERushabh Gohil100% (1)
- Service 5Dokument2 SeitenService 5Kiruba EathirajNoch keine Bewertungen
- PLC Communications UnderstandDokument2 SeitenPLC Communications Understandmanuel rangelNoch keine Bewertungen
- Programmable Logic Controller (PLC) BasicsDokument5 SeitenProgrammable Logic Controller (PLC) BasicsShah JayNoch keine Bewertungen
- Chapter 1 NotesDokument3 SeitenChapter 1 Noteshero_spaceboy3600Noch keine Bewertungen
- Introduction to Industrial Automation and Control SystemsDokument59 SeitenIntroduction to Industrial Automation and Control SystemsAbdisa BegnaNoch keine Bewertungen
- PLC Types and Programming MethodsDokument2 SeitenPLC Types and Programming MethodsLoveRahul100% (1)
- What Does PLCDokument76 SeitenWhat Does PLCpankajparasharNoch keine Bewertungen
- Control System: Types of Industrial Control SystemsDokument19 SeitenControl System: Types of Industrial Control SystemsAdnan Nawaz100% (2)
- CISA - Special TopicsDokument18 SeitenCISA - Special TopicszamanbdNoch keine Bewertungen
- Basics of PLCDokument75 SeitenBasics of PLCjay bhavsar100% (3)
- OpenPLC - An Opensource Alternative For AutomationDokument5 SeitenOpenPLC - An Opensource Alternative For AutomationThiago Alves100% (1)
- CH 1.1 Pnumatics SystemsDokument34 SeitenCH 1.1 Pnumatics Systemskabtamu mamoNoch keine Bewertungen
- PLC NetworksDokument7 SeitenPLC NetworksGeorgee A TNoch keine Bewertungen
- Programmable Logic Controller Applications and UsesDokument5 SeitenProgrammable Logic Controller Applications and Usessumit100% (1)
- Systems Concepts: SCADA Is TheDokument5 SeitenSystems Concepts: SCADA Is TheAfrNoch keine Bewertungen
- Systems Concepts: SCADA Is TheDokument5 SeitenSystems Concepts: SCADA Is TheAfrNoch keine Bewertungen
- Systems Concepts: SCADA Is TheDokument5 SeitenSystems Concepts: SCADA Is ThePHPNoch keine Bewertungen
- Systems Concepts: SCADA Is TheDokument5 SeitenSystems Concepts: SCADA Is TheAfrNoch keine Bewertungen
- SCADADokument5 SeitenSCADAapi-3765150100% (1)
- Exemplu Bun Lucrare Stiintifica Format Standard WordDokument4 SeitenExemplu Bun Lucrare Stiintifica Format Standard WordMarian TudorNoch keine Bewertungen
- Programmable Logic ControllerDokument16 SeitenProgrammable Logic ControllerMuhammad JahangirNoch keine Bewertungen
- Prelim - Lecture For PLCDokument8 SeitenPrelim - Lecture For PLCDRate17Noch keine Bewertungen
- PLC Interview QuestionDokument6 SeitenPLC Interview QuestionSethupathy100% (3)
- PLC BASICS: A GUIDE TO PROGRAMMABLE LOGIC CONTROLLERSDokument75 SeitenPLC BASICS: A GUIDE TO PROGRAMMABLE LOGIC CONTROLLERSJAY BHAVSAR50% (2)
- Chapter 2 - Introduction To PLCDokument25 SeitenChapter 2 - Introduction To PLCMOHD SABREENoch keine Bewertungen
- Programmable Logic ControllerDokument6 SeitenProgrammable Logic ControllerSEP-PublisherNoch keine Bewertungen
- Programmable Logic Control (PLC)Dokument5 SeitenProgrammable Logic Control (PLC)Bryan SolatorioNoch keine Bewertungen
- CHP 2Dokument9 SeitenCHP 2BRIAN CLIFFNoch keine Bewertungen
- PLC Basics Tutorial: What Is A PLC?Dokument6 SeitenPLC Basics Tutorial: What Is A PLC?nov17muraliNoch keine Bewertungen
- PLCDokument13 SeitenPLCChalez ZengeretsiNoch keine Bewertungen
- IEEE Conference OpenPLCDokument6 SeitenIEEE Conference OpenPLCThiago AlvesNoch keine Bewertungen
- Lecture 2 - PLC and SCADA IntrductionDokument17 SeitenLecture 2 - PLC and SCADA IntrductionDilip Kumar JenaNoch keine Bewertungen
- PLC & DDCMIS: An IntroductionDokument63 SeitenPLC & DDCMIS: An IntroductionNicole LeeNoch keine Bewertungen
- Programmable Logic Controller Name: Viloria, Maureen C. SR Code: J15-12667Dokument5 SeitenProgrammable Logic Controller Name: Viloria, Maureen C. SR Code: J15-12667Danelle GeamalaNoch keine Bewertungen
- SCADA Systems for Power MonitoringDokument14 SeitenSCADA Systems for Power MonitoringRama KarthikNoch keine Bewertungen
- What Is PLCDokument8 SeitenWhat Is PLCkunjiayman2Noch keine Bewertungen
- Assignment A PCIDokument20 SeitenAssignment A PCISanjay SundaralingamNoch keine Bewertungen
- PLC Vs DCSDokument11 SeitenPLC Vs DCSSaurabh Singh100% (1)
- Programmable Logic Controllers Tutorial - Outcome 1: D.J.Dunn 1Dokument0 SeitenProgrammable Logic Controllers Tutorial - Outcome 1: D.J.Dunn 1Anurag GuptaNoch keine Bewertungen
- Digital PID ControllersDokument21 SeitenDigital PID Controllerssopan saNoch keine Bewertungen
- Dcs Vs ScadaDokument44 SeitenDcs Vs ScadaSAYED QAISAR SHAH100% (1)
- DCS System Layout and Its Different PartsDokument6 SeitenDCS System Layout and Its Different PartsVraja Kisori100% (1)
- PLC and PLC TechnologiesDokument28 SeitenPLC and PLC Technologieskatjinomasa kavetuNoch keine Bewertungen
- Industrial Automation Guide: Costs, Benefits & ApplicationsDokument153 SeitenIndustrial Automation Guide: Costs, Benefits & ApplicationsTanvir KhanNoch keine Bewertungen
- What is SCADA? The Ultimate GuideDokument10 SeitenWhat is SCADA? The Ultimate GuidefasihNoch keine Bewertungen
- Iaa Unit 04Dokument19 SeitenIaa Unit 04SurajNoch keine Bewertungen
- Conveyor Control Using Programmable Logic ControllerDokument7 SeitenConveyor Control Using Programmable Logic ControllerdanwNoch keine Bewertungen
- Air Polution Control - Project (Rockwell)Dokument16 SeitenAir Polution Control - Project (Rockwell)Chandan MandalNoch keine Bewertungen
- Programmable Logic ControllerDokument6 SeitenProgrammable Logic ControllerSEP-PublisherNoch keine Bewertungen
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Von EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Noch keine Bewertungen
- Rotary Screw VsDokument18 SeitenRotary Screw Vsuppal11Noch keine Bewertungen
- ECE102 - F12 LecSet 6Dokument17 SeitenECE102 - F12 LecSet 6Sri KanthNoch keine Bewertungen
- ECE102 - F12 LecSet 6Dokument17 SeitenECE102 - F12 LecSet 6Sri KanthNoch keine Bewertungen
- Protective Relays Guide for Electrical NetworksDokument46 SeitenProtective Relays Guide for Electrical NetworksΓΙΩΡΓΟΣ ΒΑΣΙΛΟΓΛΟΥ100% (2)
- DXGGGGGGG, HV JGHDokument1 SeiteDXGGGGGGG, HV JGHSri KanthNoch keine Bewertungen
- (218432608) Unit-II Rectifiers Filters and Regulators by Somestuff4ruDokument49 Seiten(218432608) Unit-II Rectifiers Filters and Regulators by Somestuff4ruSri Kanth100% (2)
- DXGGGGGGG, HV JGHDokument1 SeiteDXGGGGGGG, HV JGHSri KanthNoch keine Bewertungen
- DXGGGGGGG, HV JGHDokument1 SeiteDXGGGGGGG, HV JGHSri KanthNoch keine Bewertungen
- Higher Algebra - Hall & KnightDokument593 SeitenHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- Higher Algebra - Hall & KnightDokument593 SeitenHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- Curriculum VitaeDokument2 SeitenCurriculum VitaeSri KanthNoch keine Bewertungen
- Higher Algebra - Hall & KnightDokument593 SeitenHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- Higher Algebra - Hall & KnightDokument593 SeitenHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- Higher Algebra - Hall & KnightDokument593 SeitenHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- Higher Algebra - Hall & KnightDokument593 SeitenHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- Field Wireable Connectors: Features and Selection GuidesDokument7 SeitenField Wireable Connectors: Features and Selection GuidesCarloss Ruiz RNoch keine Bewertungen
- Gauss MeterProbe-Selection-App-GuideDokument6 SeitenGauss MeterProbe-Selection-App-GuideebyjoyNoch keine Bewertungen
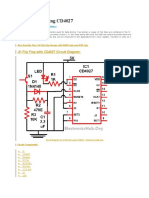
- JK Flip Flop With CD4027 Circuit DiagramDokument2 SeitenJK Flip Flop With CD4027 Circuit DiagramHARRYNoch keine Bewertungen
- Pressure Transmitter Specification Sheet: GeneralDokument1 SeitePressure Transmitter Specification Sheet: GeneralFranklin J Talero BNoch keine Bewertungen
- AxialDokument67 SeitenAxialAnonymous 6vrljINoch keine Bewertungen
- Manual Camilla Obstetrica Electrica B-48-InglesDokument15 SeitenManual Camilla Obstetrica Electrica B-48-InglesBrevas CuchoNoch keine Bewertungen
- Tilt Float SwitchDokument1 SeiteTilt Float Switchdcf67myNoch keine Bewertungen
- Catalogo Multi SplitsDokument37 SeitenCatalogo Multi SplitsDarwin RojasNoch keine Bewertungen
- Bernina Aurora 430, 440 QE, 450 User Guide & ManualDokument86 SeitenBernina Aurora 430, 440 QE, 450 User Guide & ManualJeanne GoldNoch keine Bewertungen
- At Itsce Tmax Ul 2005 Kap 06 Schaltplaene enDokument18 SeitenAt Itsce Tmax Ul 2005 Kap 06 Schaltplaene enisaiaspaula80Noch keine Bewertungen
- Ariel Coronel CV PDFDokument4 SeitenAriel Coronel CV PDFariel coronelNoch keine Bewertungen
- Manual Valvula 3'' Titan RXDokument2 SeitenManual Valvula 3'' Titan RXrolandNoch keine Bewertungen
- Tlocrt Podne Ploče - Donja Zona Tlocrt Podne Ploče - Gornja ZonaDokument1 SeiteTlocrt Podne Ploče - Donja Zona Tlocrt Podne Ploče - Gornja ZonaMario VitezNoch keine Bewertungen
- Grove Manlift Amz66 Parts PDFDokument294 SeitenGrove Manlift Amz66 Parts PDFvankarp75% (12)
- XQ500 Spec SheetDokument4 SeitenXQ500 Spec Sheetvbazan5299100% (1)
- Cabin ModuleDokument75 SeitenCabin ModuleESRANoch keine Bewertungen
- CSP FAN and WALL CAP Page13Dokument24 SeitenCSP FAN and WALL CAP Page13MINYAN GUINoch keine Bewertungen
- Service - Documentation Modulith SLX-F2Dokument8 SeitenService - Documentation Modulith SLX-F2Michael LafertteNoch keine Bewertungen
- Prospecto SPS D BH3000Dokument4 SeitenProspecto SPS D BH3000Marcos Zimmermann100% (1)
- Microprocessor Lab Manual - FinalDokument157 SeitenMicroprocessor Lab Manual - FinalDr. N.Shanmugasundaram100% (6)
- Manual Asus P5GPL-XDokument94 SeitenManual Asus P5GPL-XJuan PerezNoch keine Bewertungen
- Simple MachincesDokument2 SeitenSimple MachincesLEILANIE ABAD100% (1)
- Eng BD Tds4600b-Be-BsDokument4 SeitenEng BD Tds4600b-Be-Bsguerouaz el madjidNoch keine Bewertungen
- Casing Packer Setting Tool (CPST) : Parts Lists and Exploded ViewsDokument14 SeitenCasing Packer Setting Tool (CPST) : Parts Lists and Exploded ViewsJose Antonio Acosta100% (1)
- Auto Trans Diagnosis Mitsubishi MonteroDokument25 SeitenAuto Trans Diagnosis Mitsubishi Monteronicamarcos100% (3)
- MITSUBISHI E700 - Instruction - ManualDokument131 SeitenMITSUBISHI E700 - Instruction - ManualdanielNoch keine Bewertungen
- Inspeksi KendaraanDokument1 SeiteInspeksi Kendaraanbima prayudiNoch keine Bewertungen
- First Issue 13/1/2021 0: A.Fathy A.AbdelrazikDokument7 SeitenFirst Issue 13/1/2021 0: A.Fathy A.AbdelrazikAhmed El HadidyNoch keine Bewertungen
- 1997 3800 PCM Fiero WiringDokument3 Seiten1997 3800 PCM Fiero WiringDamián Martínez SánchezNoch keine Bewertungen