Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- TLE - IA - Carpentry Grades 7-10 CG 04.06.2014Dokument14 SeitenTLE - IA - Carpentry Grades 7-10 CG 04.06.2014RickyJeciel100% (2)
- Viceversa Tarot PDF 5Dokument1 SeiteViceversa Tarot PDF 5Kimberly Hill100% (1)
- Exp. 5 - Terminal Characteristis and Parallel Operation of Single Phase Transformers.Dokument7 SeitenExp. 5 - Terminal Characteristis and Parallel Operation of Single Phase Transformers.AbhishEk SinghNoch keine Bewertungen
- Marine Lifting and Lashing HandbookDokument96 SeitenMarine Lifting and Lashing HandbookAmrit Raja100% (1)
- Tradingview ShortcutsDokument2 SeitenTradingview Shortcutsrprasannaa2002Noch keine Bewertungen
- State Immunity Cases With Case DigestsDokument37 SeitenState Immunity Cases With Case DigestsStephanie Dawn Sibi Gok-ong100% (4)
- Powerpoint Presentation: Calcium Sulphate in Cement ManufactureDokument7 SeitenPowerpoint Presentation: Calcium Sulphate in Cement ManufactureDhruv PrajapatiNoch keine Bewertungen
- Are Groups and Teams The Same Thing? An Evaluation From The Point of Organizational PerformanceDokument6 SeitenAre Groups and Teams The Same Thing? An Evaluation From The Point of Organizational PerformanceNely Noer SofwatiNoch keine Bewertungen
- SND Kod Dt2Dokument12 SeitenSND Kod Dt2arturshenikNoch keine Bewertungen
- Health Insurance in Switzerland ETHDokument57 SeitenHealth Insurance in Switzerland ETHguzman87Noch keine Bewertungen
- Bajaj Allianz InsuranceDokument93 SeitenBajaj Allianz InsuranceswatiNoch keine Bewertungen
- Introduce Letter - CV IDS (Company Profile)Dokument13 SeitenIntroduce Letter - CV IDS (Company Profile)katnissNoch keine Bewertungen
- General Diesel Engine Diagnostic Guide PDFDokument3 SeitenGeneral Diesel Engine Diagnostic Guide PDFan0th3r_0n3Noch keine Bewertungen
- Privacy: Based On Slides Prepared by Cyndi Chie, Sarah Frye and Sharon Gray. Fifth Edition Updated by Timothy HenryDokument50 SeitenPrivacy: Based On Slides Prepared by Cyndi Chie, Sarah Frye and Sharon Gray. Fifth Edition Updated by Timothy HenryAbid KhanNoch keine Bewertungen
- Research Article: Finite Element Simulation of Medium-Range Blast Loading Using LS-DYNADokument10 SeitenResearch Article: Finite Element Simulation of Medium-Range Blast Loading Using LS-DYNAAnonymous cgcKzFtXNoch keine Bewertungen
- How To Create A Powerful Brand Identity (A Step-by-Step Guide) PDFDokument35 SeitenHow To Create A Powerful Brand Identity (A Step-by-Step Guide) PDFCaroline NobreNoch keine Bewertungen
- MOTOR INSURANCE - Two Wheeler Liability Only SCHEDULEDokument1 SeiteMOTOR INSURANCE - Two Wheeler Liability Only SCHEDULESuhail V VNoch keine Bewertungen
- Allan ToddDokument28 SeitenAllan ToddBilly SorianoNoch keine Bewertungen
- Elastic Modulus SFRCDokument9 SeitenElastic Modulus SFRCRatul ChopraNoch keine Bewertungen
- Test & Drain Valve Model 1000Dokument2 SeitenTest & Drain Valve Model 1000saifahmed7Noch keine Bewertungen
- Low Cost Building ConstructionDokument15 SeitenLow Cost Building ConstructionAtta RehmanNoch keine Bewertungen
- CHAPTER 3 Social Responsibility and EthicsDokument54 SeitenCHAPTER 3 Social Responsibility and EthicsSantiya Subramaniam100% (4)
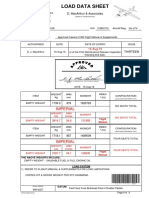
- Load Data Sheet: ImperialDokument3 SeitenLoad Data Sheet: ImperialLaurean Cub BlankNoch keine Bewertungen
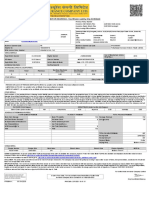
- Appendix - 5 (Under The Bye-Law No. 19 (B) )Dokument3 SeitenAppendix - 5 (Under The Bye-Law No. 19 (B) )jytj1Noch keine Bewertungen
- CodebreakerDokument3 SeitenCodebreakerwarrenNoch keine Bewertungen
- JAZEL Resume-2-1-2-1-3-1Dokument2 SeitenJAZEL Resume-2-1-2-1-3-1GirlieJoyGayoNoch keine Bewertungen
- M J 1 MergedDokument269 SeitenM J 1 MergedsanyaNoch keine Bewertungen
- Resume Jameel 22Dokument3 SeitenResume Jameel 22sandeep sandyNoch keine Bewertungen
- IdM11gR2 Sizing WP LatestDokument31 SeitenIdM11gR2 Sizing WP Latesttranhieu5959Noch keine Bewertungen
- Arduino Based Voice Controlled Robot: Aditya Chaudhry, Manas Batra, Prakhar Gupta, Sahil Lamba, Suyash GuptaDokument3 SeitenArduino Based Voice Controlled Robot: Aditya Chaudhry, Manas Batra, Prakhar Gupta, Sahil Lamba, Suyash Guptaabhishek kumarNoch keine Bewertungen