Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Tata Family TreeDokument1 SeiteTata Family Treemadan321100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Unix Prog DesignDokument7 SeitenUnix Prog Designirs_bNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Dynamics of Youth Population - Impact of Education ExpenditureDokument31 SeitenDynamics of Youth Population - Impact of Education Expendituremadan321Noch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- VPN Manual - Ubuntu - EngelskDokument5 SeitenVPN Manual - Ubuntu - Engelskmadan321Noch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Modular DesignDokument41 SeitenModular Designmadan321Noch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Time Table CH SlidesDokument23 SeitenTime Table CH Slidesmadan321Noch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Efficient Routing in Road Networks With Turn Costs: Geisberger Christian - VetterDokument12 SeitenEfficient Routing in Road Networks With Turn Costs: Geisberger Christian - Vettermadan321Noch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Route Planning With Flexible Objective FunctionsDokument14 SeitenRoute Planning With Flexible Objective Functionsmadan321Noch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Transport Optimization Finland 2009Dokument35 SeitenTransport Optimization Finland 2009madan321Noch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Time Table Ch2Dokument16 SeitenTime Table Ch2madan321Noch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Contraction of Timetable Networks With Realistic Transfers: Geisberger@kit - EduDokument26 SeitenContraction of Timetable Networks With Realistic Transfers: Geisberger@kit - Edumadan321Noch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Time Dependent Many To ManyDokument14 SeitenTime Dependent Many To Manymadan321Noch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Time-Dependent Contraction Hierarchies and ApproximationDokument71 SeitenTime-Dependent Contraction Hierarchies and Approximationmadan321Noch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Time-Dependent Contraction Hierarchies and ApproximationDokument12 SeitenTime-Dependent Contraction Hierarchies and Approximationmadan321Noch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Time Dependent Contraction Hierarchies - Basic Algorithmic IdeasDokument5 SeitenTime Dependent Contraction Hierarchies - Basic Algorithmic Ideasmadan321Noch keine Bewertungen
- Fast Detour Computation For Ride SharingDokument12 SeitenFast Detour Computation For Ride Sharingmadan321Noch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- 2) Multi-Criteria 1) Contraction Hierarchies 3) For Ride SharingDokument34 Seiten2) Multi-Criteria 1) Contraction Hierarchies 3) For Ride Sharingmadan321Noch keine Bewertungen
- Compression of RDsDokument7 SeitenCompression of RDsmadan321Noch keine Bewertungen
- Heuristic Contraction Hierarchies With Approximation GuaranteeDokument9 SeitenHeuristic Contraction Hierarchies With Approximation Guaranteemadan321Noch keine Bewertungen
- Contraction Hierarchies: Faster and Simpler Hierarchical Routing in Road NetworksDokument30 SeitenContraction Hierarchies: Faster and Simpler Hierarchical Routing in Road Networksmadan321Noch keine Bewertungen
- Algeng Workshop Google RoutingDokument11 SeitenAlgeng Workshop Google Routingmadan321Noch keine Bewertungen
- Naac - SSR - Rvrjcce-21022014Dokument356 SeitenNaac - SSR - Rvrjcce-21022014madan321Noch keine Bewertungen
- Heuristic Contraction Hierarchies With Approximation GuaranteeDokument7 SeitenHeuristic Contraction Hierarchies With Approximation Guaranteemadan321Noch keine Bewertungen
- Between PresentationDokument21 SeitenBetween Presentationmadan321Noch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Approx CH SlidesDokument39 SeitenApprox CH Slidesmadan321Noch keine Bewertungen
- Fast Detour Computation For Ride Sharing: Robert Geisberger, Dennis Luxen, Sabine Neubauer, Peter Sanders, Lars VolkerDokument5 SeitenFast Detour Computation For Ride Sharing: Robert Geisberger, Dennis Luxen, Sabine Neubauer, Peter Sanders, Lars Volkermadan321Noch keine Bewertungen
- Expense RatiosDokument24 SeitenExpense Ratiosmadan321Noch keine Bewertungen
- Alternative Routes TRDokument10 SeitenAlternative Routes TRmadan321Noch keine Bewertungen
- OPM Assignment 1Dokument11 SeitenOPM Assignment 1Azka FarooquiNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- USA Mathematical Talent Search Solutions To Problem 4/1/17Dokument4 SeitenUSA Mathematical Talent Search Solutions To Problem 4/1/17สฮาบูดีน สาและNoch keine Bewertungen
- OpenFiler Vs FreeNASDokument5 SeitenOpenFiler Vs FreeNASSyed Atif Ali100% (34)
- Table of LFSRDokument6 SeitenTable of LFSRMayur AnvekarNoch keine Bewertungen
- Chapter10 Econometrics DummyVariableModelDokument8 SeitenChapter10 Econometrics DummyVariableModelAbdullah KhatibNoch keine Bewertungen
- Modern Power System Matlab Simulation, Pspice, SVC-HVDC Transmission, STATCOM, Location of Facts, Power System ME, M.tech, B.Tech, BE Final Year IEEE Projects 2011 - 2012Dokument3 SeitenModern Power System Matlab Simulation, Pspice, SVC-HVDC Transmission, STATCOM, Location of Facts, Power System ME, M.tech, B.Tech, BE Final Year IEEE Projects 2011 - 2012srini_792002Noch keine Bewertungen
- Instructor Materials Chapter 3: Computer Assembly: IT Essentials v6.0Dokument28 SeitenInstructor Materials Chapter 3: Computer Assembly: IT Essentials v6.0opsssNoch keine Bewertungen
- List of PlayStation Store TurboGrafx-16 GamesDokument3 SeitenList of PlayStation Store TurboGrafx-16 Gamesjavi83Noch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- S+ I/O: HAI805 & HAO805 HART I/O: Symphony PlusDokument4 SeitenS+ I/O: HAI805 & HAO805 HART I/O: Symphony PlusMD. AL MUZAHIDNoch keine Bewertungen
- Cyberark Skyark Data SheetDokument2 SeitenCyberark Skyark Data SheetSomashekar DharnappagoudarNoch keine Bewertungen
- The GD-04 "David" GSM Communicator: Table 1 - A Brief List of Programming SMS InstructionsDokument8 SeitenThe GD-04 "David" GSM Communicator: Table 1 - A Brief List of Programming SMS InstructionsJesús UrrietaNoch keine Bewertungen
- Noftl-Kv: Tackling Write-Amplification On Kv-Stores With Native Storage ManagementDokument4 SeitenNoftl-Kv: Tackling Write-Amplification On Kv-Stores With Native Storage Management化物君Noch keine Bewertungen
- Coimbatore RegionDokument195 SeitenCoimbatore RegionThiruvengadam CNoch keine Bewertungen
- Capturing Audio Streams With Acoustic Echo Cancellation and BeamformingDokument12 SeitenCapturing Audio Streams With Acoustic Echo Cancellation and BeamformingAdam CadmonNoch keine Bewertungen
- Tutorial 12 13 14 BBBL2023Dokument16 SeitenTutorial 12 13 14 BBBL2023YANG YUN RUINoch keine Bewertungen
- Project Communication PlanDokument5 SeitenProject Communication PlanCraig VanceNoch keine Bewertungen
- Book Name Authors Publisher Amazon LinkDokument2 SeitenBook Name Authors Publisher Amazon LinkOmar ShahidNoch keine Bewertungen
- Judith Ainslie Jackson: Professional Experience Lice Ladies of AtlantaDokument4 SeitenJudith Ainslie Jackson: Professional Experience Lice Ladies of AtlantaJudi JacksonNoch keine Bewertungen
- Vsphere Data Protection 5.5 Advanced - DatasheetDokument2 SeitenVsphere Data Protection 5.5 Advanced - DatasheetOscarNoch keine Bewertungen
- Quick Setup Guide: Terrasat Communications IBUC - Intelligent Block UpconverterDokument10 SeitenQuick Setup Guide: Terrasat Communications IBUC - Intelligent Block UpconverterGenka BuchukuriNoch keine Bewertungen
- Excel QM Select Module From QM in Main Menu BarDokument5 SeitenExcel QM Select Module From QM in Main Menu BarBoy TampubolonNoch keine Bewertungen
- 1Y Low Voltage Board MaintenanceDokument2 Seiten1Y Low Voltage Board MaintenanceOGBONNAYA MARTINSNoch keine Bewertungen
- Supply Chain Version 2Dokument37 SeitenSupply Chain Version 2Abdelhamid Harakat100% (1)
- Pentest Open 08 2013Dokument76 SeitenPentest Open 08 2013Jose Simpson100% (1)
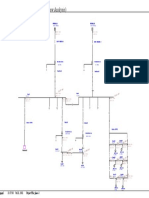
- One-Line Diagram - OLV1 (Load Flow Analysis) : 33.0 7 KV 33.0 7 KV 33.0 7 KV 33.0 7 KVDokument1 SeiteOne-Line Diagram - OLV1 (Load Flow Analysis) : 33.0 7 KV 33.0 7 KV 33.0 7 KV 33.0 7 KVhaiderNoch keine Bewertungen
- MECHANICAL - Muhammad Shafiq Bin Roslan - 0139724098Dokument3 SeitenMECHANICAL - Muhammad Shafiq Bin Roslan - 0139724098philljohnNoch keine Bewertungen
- Capstone ProjectDokument29 SeitenCapstone ProjectPrashant A UNoch keine Bewertungen
- Ism FDokument128 SeitenIsm FAmit GuptaNoch keine Bewertungen
- Cybersecurity and Physical Security ConvergenceDokument4 SeitenCybersecurity and Physical Security ConvergenceDavid F MartinezNoch keine Bewertungen
- The Internet Con: How to Seize the Means of ComputationVon EverandThe Internet Con: How to Seize the Means of ComputationBewertung: 5 von 5 Sternen5/5 (6)
- Evaluation of Some SMS Verification Services and Virtual Credit Cards Services for Online Accounts VerificationsVon EverandEvaluation of Some SMS Verification Services and Virtual Credit Cards Services for Online Accounts VerificationsBewertung: 5 von 5 Sternen5/5 (2)
- Ten Arguments for Deleting Your Social Media Accounts Right NowVon EverandTen Arguments for Deleting Your Social Media Accounts Right NowBewertung: 4 von 5 Sternen4/5 (388)
- The YouTube Formula: How Anyone Can Unlock the Algorithm to Drive Views, Build an Audience, and Grow RevenueVon EverandThe YouTube Formula: How Anyone Can Unlock the Algorithm to Drive Views, Build an Audience, and Grow RevenueBewertung: 5 von 5 Sternen5/5 (33)