Das könnte Ihnen auch gefallen
- Uncertainties in GPS Positioning: A Mathematical DiscourseVon EverandUncertainties in GPS Positioning: A Mathematical DiscourseBewertung: 3 von 5 Sternen3/5 (2)
- A Presentation On Seminar Topic: Uses of Gps Satellite in ConstructionDokument22 SeitenA Presentation On Seminar Topic: Uses of Gps Satellite in ConstructionArpit PatelNoch keine Bewertungen
- PSM1 - Geoid Based Seamless Vertical Datum For Marine Cadastre ApplicationDokument26 SeitenPSM1 - Geoid Based Seamless Vertical Datum For Marine Cadastre ApplicationAmsyar AbdullahNoch keine Bewertungen
- l4 Control Survey TraverseDokument23 Seitenl4 Control Survey TraverseSerinaaNoch keine Bewertungen
- Aerial TriangulationDokument37 SeitenAerial TriangulationRussel Clarete100% (1)
- Introduction To Photogrammetry: Development Cycles of The PhotogrammetryDokument8 SeitenIntroduction To Photogrammetry: Development Cycles of The PhotogrammetryEng Abdulahi HajiNoch keine Bewertungen
- Surveying and Mapping Handbook - 10!10!16Dokument127 SeitenSurveying and Mapping Handbook - 10!10!16dannyf09Noch keine Bewertungen
- The Geoid and The Height Systems The Geoid and The Height SystemsDokument5 SeitenThe Geoid and The Height Systems The Geoid and The Height SystemsKismet100% (1)
- Topic 4 Positioining V2Dokument39 SeitenTopic 4 Positioining V2Aqilah Taufik100% (2)
- Microwave Remote SensingDokument41 SeitenMicrowave Remote SensingSaurabh SumanNoch keine Bewertungen
- Introduction To Hydrographic Surveying: Topic: Definition of HydrographyDokument52 SeitenIntroduction To Hydrographic Surveying: Topic: Definition of HydrographyVictoria Jackson0% (1)
- Total StationDokument5 SeitenTotal StationvcetNoch keine Bewertungen
- How To Use GPS and GIS in Surveying: Soran University Faculty of Engineering - Civil Engineering DepartmentDokument4 SeitenHow To Use GPS and GIS in Surveying: Soran University Faculty of Engineering - Civil Engineering Departmentnhm.1974Noch keine Bewertungen
- Experience On Using Total Station Surveying For Mapping and ContouringDokument13 SeitenExperience On Using Total Station Surveying For Mapping and ContouringIAEME PublicationNoch keine Bewertungen
- Cg601 Geodesy 2 Topic 1Dokument53 SeitenCg601 Geodesy 2 Topic 1Lyana Zul100% (2)
- Geographical and Earth Sciences: Traversing Project ReportDokument11 SeitenGeographical and Earth Sciences: Traversing Project ReportManny SinghNoch keine Bewertungen
- Control Surveying 1Dokument220 SeitenControl Surveying 1Madaraka DecheNoch keine Bewertungen
- Traversing Notes - Surveying II - Sudip Khadka - CivilengineeringDokument37 SeitenTraversing Notes - Surveying II - Sudip Khadka - CivilengineeringSudip KhadkaNoch keine Bewertungen
- StarNet V6 PRO ManualDokument70 SeitenStarNet V6 PRO ManualGilberto H. TiradoNoch keine Bewertungen
- Application of SurveyDokument21 SeitenApplication of SurveyAmila MadhushanNoch keine Bewertungen
- Lecture 1 - Intro To Surveying and MappingDokument7 SeitenLecture 1 - Intro To Surveying and MappingNathan Bernardino50% (2)
- Chapter 3 Analysis and Adjustment of ObservationsDokument67 SeitenChapter 3 Analysis and Adjustment of ObservationsAbdul AzimNoch keine Bewertungen
- Surveying I Note, 2015Dokument72 SeitenSurveying I Note, 2015feyselNoch keine Bewertungen
- Methodology and Parameters For Datum Transformation Between The New and Old Reference SystemsDokument29 SeitenMethodology and Parameters For Datum Transformation Between The New and Old Reference SystemsJorge AguirreNoch keine Bewertungen
- The Ellipsoid and The Reference Surface The Ellipsoid and The Reference SurfaceDokument6 SeitenThe Ellipsoid and The Reference Surface The Ellipsoid and The Reference SurfaceKismet0% (1)
- Selected Topics in Geodesy Part 2Dokument53 SeitenSelected Topics in Geodesy Part 2Osama SherifNoch keine Bewertungen
- 29 June 2020 - Introducing Photogrammetric Concepts Dr. Poonam S. TiwariDokument45 Seiten29 June 2020 - Introducing Photogrammetric Concepts Dr. Poonam S. TiwariLiamNoch keine Bewertungen
- Hydrographic Manual of 1976-81Dokument400 SeitenHydrographic Manual of 1976-81mishazujevNoch keine Bewertungen
- Maths NotesDokument71 SeitenMaths NotesSekar DineshNoch keine Bewertungen
- GPS and Its Application in Hydrographic SurveyDokument12 SeitenGPS and Its Application in Hydrographic SurveyChetana Sharma100% (1)
- Photogrammetry Mathematics 080116Dokument128 SeitenPhotogrammetry Mathematics 080116firosekhan100% (2)
- An Introduction To Horizontal Control Survey Techniques: J. Paul Guyer, P.E., R.ADokument43 SeitenAn Introduction To Horizontal Control Survey Techniques: J. Paul Guyer, P.E., R.AemmanuelNoch keine Bewertungen
- GNSS Positioning MethodsDokument21 SeitenGNSS Positioning MethodsFazelah YakubNoch keine Bewertungen
- Tutorial PhotogrammetryDokument2 SeitenTutorial PhotogrammetryAyush P GuptaNoch keine Bewertungen
- SUG421 - Advanced Cadastral Survey (E-Cadastre and CCS)Dokument7 SeitenSUG421 - Advanced Cadastral Survey (E-Cadastre and CCS)mruzainimf89% (9)
- Surveying With GPS, TS, TlsDokument55 SeitenSurveying With GPS, TS, TlsYurio WindiatmokoNoch keine Bewertungen
- The Geodetic Datum and The Geodetic Reference SystemsDokument6 SeitenThe Geodetic Datum and The Geodetic Reference SystemsKismetNoch keine Bewertungen
- Cartography Assignment 1Dokument7 SeitenCartography Assignment 1Tapiwa Munzanza100% (1)
- SUG413 - Advanced Engineering Surveying - Curves CalculationDokument11 SeitenSUG413 - Advanced Engineering Surveying - Curves Calculationmruzainimf100% (2)
- Basic SurveyingDokument6 SeitenBasic Surveyingervikas34Noch keine Bewertungen
- Pre-Construction Survey ManualDokument85 SeitenPre-Construction Survey ManualNyangoe JoelNoch keine Bewertungen
- Introduction To Geodesy: Lecture NotesDokument125 SeitenIntroduction To Geodesy: Lecture NotesAlieah AlinaNoch keine Bewertungen
- Report HydrographyDokument15 SeitenReport HydrographyAfif AsyrafNoch keine Bewertungen
- General Surveying 1 Lab ManualDokument33 SeitenGeneral Surveying 1 Lab ManualAmber Jyl AlbuñanNoch keine Bewertungen
- Main Discourse Topo EditedDokument68 SeitenMain Discourse Topo EditedAttah ATTAHNoch keine Bewertungen
- Photo GRammetryDokument27 SeitenPhoto GRammetryVishal MishraNoch keine Bewertungen
- GEOINFORMATICSDokument21 SeitenGEOINFORMATICSAkhila Sunshine100% (1)
- Lecture 13 - Techniques For Vertical Distance MeasurementsDokument23 SeitenLecture 13 - Techniques For Vertical Distance MeasurementsAndreaMiccaBautista0% (1)
- GE10 Lecture 1 - Intro To Surveying and MappingDokument51 SeitenGE10 Lecture 1 - Intro To Surveying and MappingMaan Hinolan100% (1)
- L1 - Introduction To Satellite GeodesyDokument18 SeitenL1 - Introduction To Satellite GeodesyAnil SubediNoch keine Bewertungen
- Geodesy 1Dokument14 SeitenGeodesy 1Dr Omega YTNoch keine Bewertungen
- Total StationDokument5 SeitenTotal StationTapas Singh100% (1)
- C2005 Traverse SurveyDokument11 SeitenC2005 Traverse SurveyhjwNoch keine Bewertungen
- SUG596 - Field Scheme II (Engineering Survey)Dokument60 SeitenSUG596 - Field Scheme II (Engineering Survey)mruzainimf90% (10)
- GE Student Handbook 2015Dokument48 SeitenGE Student Handbook 2015Angelie LapeNoch keine Bewertungen
- 6 Ge 1Dokument12 Seiten6 Ge 1jerald lagoNoch keine Bewertungen
- 436 33 Powerpoint Slides CHAPTER 1Dokument69 Seiten436 33 Powerpoint Slides CHAPTER 1Anonymous PeFQLw19Noch keine Bewertungen
- A Review of Photogrammetric PrinciplesDokument72 SeitenA Review of Photogrammetric PrinciplesAna NadhirahNoch keine Bewertungen
- 1 - Introduction To Total StationDokument32 Seiten1 - Introduction To Total StationSandeepNoch keine Bewertungen
- Hand Book For Guideline Land SurveyorsDokument76 SeitenHand Book For Guideline Land SurveyorsChamara PrasannaNoch keine Bewertungen
- Circular - Survey Depatment - CAD MappingDokument12 SeitenCircular - Survey Depatment - CAD MappingChamara PrasannaNoch keine Bewertungen
- Uda RegulationDokument155 SeitenUda RegulationChamara PrasannaNoch keine Bewertungen
- 11-2019 EngDokument14 Seiten11-2019 EngChamara PrasannaNoch keine Bewertungen
- Manual 1865228Dokument22 SeitenManual 1865228Chamara PrasannaNoch keine Bewertungen
- TBCManualDokument134 SeitenTBCManualEdwaldo WenceslaiNoch keine Bewertungen
- 2020 1 8Dokument1 Seite2020 1 8Chamara PrasannaNoch keine Bewertungen
- How Do I Elevation in Google EarthDokument4 SeitenHow Do I Elevation in Google Earthandri.plneNoch keine Bewertungen
- Simple SortingDokument15 SeitenSimple Sortingfuzel jamilNoch keine Bewertungen
- Padiyapelella PDFDokument1 SeitePadiyapelella PDFChamara PrasannaNoch keine Bewertungen
- Application Form Part Time CourseDokument3 SeitenApplication Form Part Time CourseChamara PrasannaNoch keine Bewertungen
- Time Extention Letter Sample 2014Dokument1 SeiteTime Extention Letter Sample 2014Chamara PrasannaNoch keine Bewertungen
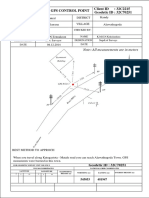
- Description of Gps Control Point Client ID: 32C2215 Geodetic ID: 32C70251Dokument1 SeiteDescription of Gps Control Point Client ID: 32C2215 Geodetic ID: 32C70251Chamara PrasannaNoch keine Bewertungen
- 24-CHAPTER XXIV - Digital Data ManagementDokument32 Seiten24-CHAPTER XXIV - Digital Data ManagementChamara PrasannaNoch keine Bewertungen
- Elevations From GPSDokument4 SeitenElevations From GPSGalih Yudha Wahyu SaputraNoch keine Bewertungen
- Sample Paper Computer NetworkDokument1 SeiteSample Paper Computer NetworkChamara PrasannaNoch keine Bewertungen
- Intro To ML and Learning Algorithms For Single-Layer NNDokument12 SeitenIntro To ML and Learning Algorithms For Single-Layer NNChamara PrasannaNoch keine Bewertungen
- Simple Data StructuresDokument32 SeitenSimple Data StructuresChamara PrasannaNoch keine Bewertungen
- Network LayerDokument18 SeitenNetwork LayerChamara PrasannaNoch keine Bewertungen
- Sdcad2009 ManualDokument30 SeitenSdcad2009 ManualChamara PrasannaNoch keine Bewertungen
- AutoCAD Civil 3D API Developer S GuideDokument419 SeitenAutoCAD Civil 3D API Developer S Guideedgardy21100% (2)
- Heap Data StructureDokument18 SeitenHeap Data StructureChamara PrasannaNoch keine Bewertungen
- V'HN QD Ëql X'R G#Ïm M'R@P'L Øny Aaky QDPW Aaky @P'Åây Îáwkl Øny QD Ëql @K'És ËqlDokument1 SeiteV'HN QD Ëql X'R G#Ïm M'R@P'L Øny Aaky QDPW Aaky @P'Åây Îáwkl Øny QD Ëql @K'És ËqlChamara PrasannaNoch keine Bewertungen
- Sri Lanka DatumDokument11 SeitenSri Lanka DatumChamara PrasannaNoch keine Bewertungen
- Manual Civil 3D 2011 PDFDokument2.846 SeitenManual Civil 3D 2011 PDFMiguel AngelNoch keine Bewertungen
- Distributor Agreem Distributor Agreement Ent (Draft)Dokument8 SeitenDistributor Agreem Distributor Agreement Ent (Draft)Chamara PrasannaNoch keine Bewertungen
- Administative Service Gazette 2012-04-01Dokument1 SeiteAdministative Service Gazette 2012-04-01Chamara PrasannaNoch keine Bewertungen
- IFA KarunaratneDokument76 SeitenIFA KarunaratneChamara PrasannaNoch keine Bewertungen
- Front PageDokument1 SeiteFront PageChamara PrasannaNoch keine Bewertungen
- The-Fate-of-Remnant (RWBY) PDFDokument55 SeitenThe-Fate-of-Remnant (RWBY) PDFLeo Knøsgaard HebyNoch keine Bewertungen
- Computer Aided Simulation of Open Pit Slope Stability: Title: Literature ReviewDokument6 SeitenComputer Aided Simulation of Open Pit Slope Stability: Title: Literature ReviewDakshith Ruvin WijesingheNoch keine Bewertungen
- A4. Drainage Design 2Dokument54 SeitenA4. Drainage Design 2DARSHANKUMAR VORANoch keine Bewertungen
- The Lectures On Physical Geography Given by Immanuel Kant in Konigberg Were of Great Significance For The Later Development of GeographyDokument2 SeitenThe Lectures On Physical Geography Given by Immanuel Kant in Konigberg Were of Great Significance For The Later Development of GeographyKing Rudolf0% (1)
- Jamestown - 1607Dokument45 SeitenJamestown - 1607Vaibhav Santuka - 6TNoch keine Bewertungen
- Low Cost HousingDokument118 SeitenLow Cost HousingNaava BasiaNoch keine Bewertungen
- Claire L. Parkinson Et Al - Aqua: An Earth-Observing Satellite Mission To Examine Water and Other Climate VariablesDokument11 SeitenClaire L. Parkinson Et Al - Aqua: An Earth-Observing Satellite Mission To Examine Water and Other Climate VariablesUasnsdaNoch keine Bewertungen
- CANIK, Baki. The Formation of Sinkholes (Obruk) Between Karapinar and Kizôren - KonyaDokument14 SeitenCANIK, Baki. The Formation of Sinkholes (Obruk) Between Karapinar and Kizôren - KonyaCaegeoNoch keine Bewertungen
- Exam Specifications - PS Supplied ReferencesDokument24 SeitenExam Specifications - PS Supplied ReferencesDime CeselkoskiNoch keine Bewertungen
- The International Atlas of Mars Exploration Volume 2, 2004 To 2014 From Spirit To CuriosityDokument459 SeitenThe International Atlas of Mars Exploration Volume 2, 2004 To 2014 From Spirit To Curiositysarjoon100% (1)
- Karnali Hydrlogy Report-III BKBallaDokument16 SeitenKarnali Hydrlogy Report-III BKBallakesharinareshNoch keine Bewertungen
- Glebe Cottage, Llantilio Pertholey, Abergavenny. Archaeological EvaluationDokument20 SeitenGlebe Cottage, Llantilio Pertholey, Abergavenny. Archaeological EvaluationAPAC LtdNoch keine Bewertungen
- World Ocean PDFDokument145 SeitenWorld Ocean PDFVital ShippingNoch keine Bewertungen
- Full Borehole Analysis and Soil ReplacementDokument1 SeiteFull Borehole Analysis and Soil ReplacementAfuye Oluyemi IbiyinkaNoch keine Bewertungen
- s6 Geography p2 Revision Past PapersDokument3 Seitens6 Geography p2 Revision Past Papersokiajunior1Noch keine Bewertungen
- Concept PaperDokument2 SeitenConcept PaperChristine SeriosaNoch keine Bewertungen
- Hydrologic Estimates: For Small Hydroelectric ProjectsDokument54 SeitenHydrologic Estimates: For Small Hydroelectric ProjectsRisyda UmmamiNoch keine Bewertungen
- Biosphere Reserves in IndiaDokument4 SeitenBiosphere Reserves in IndiaApurbo MaityNoch keine Bewertungen
- My CommunityDokument4 SeitenMy Communitymichietorres7Noch keine Bewertungen
- List All CountriesDokument14 SeitenList All CountriesBun PiseyNoch keine Bewertungen
- ARAMCO Examination UpdatedDokument28 SeitenARAMCO Examination UpdatedEdi Putro SantosoNoch keine Bewertungen
- Introduction To Remote Sensing PDFDokument19 SeitenIntroduction To Remote Sensing PDFErnawati SengajiNoch keine Bewertungen
- History of MyanmarDokument5 SeitenHistory of MyanmarSrikanth JutruNoch keine Bewertungen
- How To Use GPS 72HDokument2 SeitenHow To Use GPS 72HStephen MurimiNoch keine Bewertungen
- Free Water Cycle Pop Up OrganizerDokument10 SeitenFree Water Cycle Pop Up Organizeralessandra fitermanNoch keine Bewertungen
- Waugh Geoff - Ed 4762 Assignment 4 Project IntroductionDokument4 SeitenWaugh Geoff - Ed 4762 Assignment 4 Project Introductionapi-284616129Noch keine Bewertungen
- MRO Accreditation MC186 - For PostingDokument5 SeitenMRO Accreditation MC186 - For PostingNairdna P Led OirasorNoch keine Bewertungen
- Geoint IPDokument65 SeitenGeoint IPPamela Washington100% (1)
- GIS Manual ArcView3xDokument36 SeitenGIS Manual ArcView3xMaria Luiza Jipescu100% (1)
- Tacloban Declaration On Mangrove ReforestationDokument6 SeitenTacloban Declaration On Mangrove ReforestationGMA News OnlineNoch keine Bewertungen
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseVon EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseBewertung: 3.5 von 5 Sternen3.5/5 (69)
- Water to the Angels: William Mulholland, His Monumental Aqueduct, and the Rise of Los AngelesVon EverandWater to the Angels: William Mulholland, His Monumental Aqueduct, and the Rise of Los AngelesBewertung: 4 von 5 Sternen4/5 (21)
- The Comfort of Crows: A Backyard YearVon EverandThe Comfort of Crows: A Backyard YearBewertung: 4.5 von 5 Sternen4.5/5 (23)
- Periodic Tales: A Cultural History of the Elements, from Arsenic to ZincVon EverandPeriodic Tales: A Cultural History of the Elements, from Arsenic to ZincBewertung: 3.5 von 5 Sternen3.5/5 (137)
- Alien Oceans: The Search for Life in the Depths of SpaceVon EverandAlien Oceans: The Search for Life in the Depths of SpaceBewertung: 4.5 von 5 Sternen4.5/5 (26)
- The Storm of the Century: Tragedy, Heroism, Survival, and the Epic True Story of America's Deadliest Natural DisasterVon EverandThe Storm of the Century: Tragedy, Heroism, Survival, and the Epic True Story of America's Deadliest Natural DisasterNoch keine Bewertungen
- The Weather Machine: A Journey Inside the ForecastVon EverandThe Weather Machine: A Journey Inside the ForecastBewertung: 3.5 von 5 Sternen3.5/5 (31)
- When the Sahara Was Green: How Our Greatest Desert Came to BeVon EverandWhen the Sahara Was Green: How Our Greatest Desert Came to BeBewertung: 4.5 von 5 Sternen4.5/5 (6)
- Smokejumper: A Memoir by One of America's Most Select Airborne FirefightersVon EverandSmokejumper: A Memoir by One of America's Most Select Airborne FirefightersNoch keine Bewertungen
- So Others May Live: Coast Guard's Rescue Swimmers Saving Lives, Defying DeathVon EverandSo Others May Live: Coast Guard's Rescue Swimmers Saving Lives, Defying DeathBewertung: 4.5 von 5 Sternen4.5/5 (6)
- Survival Mom: How to Prepare Your Family for Everyday Disasters and Worst-Case ScenariosVon EverandSurvival Mom: How to Prepare Your Family for Everyday Disasters and Worst-Case ScenariosBewertung: 3.5 von 5 Sternen3.5/5 (8)
- A Brief History of the Earth's Climate: Everyone's Guide to the Science of Climate ChangeVon EverandA Brief History of the Earth's Climate: Everyone's Guide to the Science of Climate ChangeBewertung: 5 von 5 Sternen5/5 (4)
- Pitfall: The Race to Mine the World’s Most Vulnerable PlacesVon EverandPitfall: The Race to Mine the World’s Most Vulnerable PlacesNoch keine Bewertungen
- Civilized To Death: The Price of ProgressVon EverandCivilized To Death: The Price of ProgressBewertung: 4.5 von 5 Sternen4.5/5 (215)
- The Big Burn: Teddy Roosevelt and the Fire that Saved AmericaVon EverandThe Big Burn: Teddy Roosevelt and the Fire that Saved AmericaBewertung: 5 von 5 Sternen5/5 (9)
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseVon EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseBewertung: 4 von 5 Sternen4/5 (111)
- The World Beneath: The Life and Times of Unknown Sea Creatures and Coral ReefsVon EverandThe World Beneath: The Life and Times of Unknown Sea Creatures and Coral ReefsBewertung: 4.5 von 5 Sternen4.5/5 (4)
- A Brief History of Earth: Four Billion Years in Eight ChaptersVon EverandA Brief History of Earth: Four Billion Years in Eight ChaptersBewertung: 4 von 5 Sternen4/5 (113)
- Exploring Creation with Physical Science, 3rd EditionVon EverandExploring Creation with Physical Science, 3rd EditionBewertung: 5 von 5 Sternen5/5 (2)
- Climate Justice: Hope, Resilience, and the Fight for a Sustainable FutureVon EverandClimate Justice: Hope, Resilience, and the Fight for a Sustainable FutureBewertung: 3.5 von 5 Sternen3.5/5 (16)