Das könnte Ihnen auch gefallen
- Geometrical Dimensioning and Tolerancing for Design, Manufacturing and Inspection: A Handbook for Geometrical Product Specification Using ISO and ASME StandardsVon EverandGeometrical Dimensioning and Tolerancing for Design, Manufacturing and Inspection: A Handbook for Geometrical Product Specification Using ISO and ASME StandardsBewertung: 4.5 von 5 Sternen4.5/5 (3)
- Thin Rims For Internal GearsDokument8 SeitenThin Rims For Internal GearsMass Giovani100% (1)
- Automotive Buzz, Squeak and Rattle: Mechanisms, Analysis, Evaluation and PreventionVon EverandAutomotive Buzz, Squeak and Rattle: Mechanisms, Analysis, Evaluation and PreventionBewertung: 5 von 5 Sternen5/5 (3)
- Optimizing Gear Geometry For Minimum Transmission Error, Mesh Friction Losses and Scuffing Risk Through Computer - Aided EngineeringDokument10 SeitenOptimizing Gear Geometry For Minimum Transmission Error, Mesh Friction Losses and Scuffing Risk Through Computer - Aided EngineeringGoffardNoch keine Bewertungen
- Performance-Based Gear Metrology: Kinematic - Transmission - Error Computation and DiagnosisVon EverandPerformance-Based Gear Metrology: Kinematic - Transmission - Error Computation and DiagnosisNoch keine Bewertungen
- Spin Bearing Retainer Design OptimizationDokument18 SeitenSpin Bearing Retainer Design OptimizationankitsarvaiyaNoch keine Bewertungen
- Gear Quality - What It's All AboutDokument5 SeitenGear Quality - What It's All AboutFemi FadeyiNoch keine Bewertungen
- AnwanaDokument16 SeitenAnwanaHiongyiiNoch keine Bewertungen
- Journal Bearing Performance and Metrology Issues: of Achievements in Materials and Manufacturing EngineeringDokument6 SeitenJournal Bearing Performance and Metrology Issues: of Achievements in Materials and Manufacturing EngineeringdypkentepNoch keine Bewertungen
- Enhanced Friction Modeling For Steady-State Rolling Tires: Citation For Published Version (APA)Dokument164 SeitenEnhanced Friction Modeling For Steady-State Rolling Tires: Citation For Published Version (APA)Mallikarjunachari GNoch keine Bewertungen
- Brakes Analytical Auc03 Delphi PDFDokument16 SeitenBrakes Analytical Auc03 Delphi PDFhimanshu AroraNoch keine Bewertungen
- Gear SpecifyingDokument5 SeitenGear SpecifyingKailas KatharNoch keine Bewertungen
- How Long Will A Bearing Last? Standardized Life Equations Help To AnswerDokument3 SeitenHow Long Will A Bearing Last? Standardized Life Equations Help To AnswervijaykhandgeNoch keine Bewertungen
- Optimum Design of A Journal Bearing - A Review: National Conference On Recent Trends in Engineering & TechnologyDokument4 SeitenOptimum Design of A Journal Bearing - A Review: National Conference On Recent Trends in Engineering & TechnologyVirginia KnightNoch keine Bewertungen
- KissSoft Article GearAnalysisAndOptimization PDFDokument12 SeitenKissSoft Article GearAnalysisAndOptimization PDFeng13Noch keine Bewertungen
- Mill Spindle Advanced Gear Design: William R. HerbstrittDokument5 SeitenMill Spindle Advanced Gear Design: William R. HerbstrittTRUNG QUOC LENoch keine Bewertungen
- A Translation Technique: Dimensionless Ratings and Conversion Factors Between ISO and AGMA Gear StandardsDokument9 SeitenA Translation Technique: Dimensionless Ratings and Conversion Factors Between ISO and AGMA Gear StandardsAlbertoNoch keine Bewertungen
- Problem StatemenetDokument7 SeitenProblem StatemenetlitonNoch keine Bewertungen
- Application of Weldment Fatigue Methods To Conveyors Pulley DesignDokument6 SeitenApplication of Weldment Fatigue Methods To Conveyors Pulley DesignIgor San Martín PeñalozaNoch keine Bewertungen
- Influence of Tire Operating Conditions On ABS PerformanceDokument27 SeitenInfluence of Tire Operating Conditions On ABS Performancesupero huNoch keine Bewertungen
- Gear Quality PDFDokument3 SeitenGear Quality PDFvijaykumarnNoch keine Bewertungen
- Gear QualityDokument3 SeitenGear QualityMahender KumarNoch keine Bewertungen
- Graduate Seminar: Bahir Dar Institute of TechnologyDokument29 SeitenGraduate Seminar: Bahir Dar Institute of TechnologyTibebu MerideNoch keine Bewertungen
- Aeletters 2022 7 2 5Dokument8 SeitenAeletters 2022 7 2 5miskoscribdNoch keine Bewertungen
- MASTER - Publications 48Dokument1 SeiteMASTER - Publications 48gioNoch keine Bewertungen
- Optimization of Car Rim Using OptiStructDokument6 SeitenOptimization of Car Rim Using OptiStructsujaydsouza1987Noch keine Bewertungen
- 0817 AgmaDokument4 Seiten0817 AgmahrrypnNoch keine Bewertungen
- Research Paper 165577Dokument13 SeitenResearch Paper 165577alberto garciaNoch keine Bewertungen
- Isma2012 0731Dokument12 SeitenIsma2012 0731ranim najibNoch keine Bewertungen
- 1 s2.0 S0950423019307284 MainDokument13 Seiten1 s2.0 S0950423019307284 Mainnferreira_245024Noch keine Bewertungen
- Pages From MASTER - Publications-3Dokument1 SeitePages From MASTER - Publications-3gioNoch keine Bewertungen
- Spur Gear Design Some New Perspectives DDokument12 SeitenSpur Gear Design Some New Perspectives DUsama GulzarNoch keine Bewertungen
- Fatigue Analysis of An Automobile Wheel Rim: AbstractDokument10 SeitenFatigue Analysis of An Automobile Wheel Rim: AbstractSagar ANoch keine Bewertungen
- AGMA FTM 05 Tooth Form Calculation EDokument13 SeitenAGMA FTM 05 Tooth Form Calculation Etropical0007Noch keine Bewertungen
- Indian Gear Standard Is.8830.2007Dokument65 SeitenIndian Gear Standard Is.8830.2007Manoj Singh100% (2)
- Determination of Forming Limit Diagram For Aisi 1008 Steel Sheet by Theoratical, Experimental and Fea MethodDokument7 SeitenDetermination of Forming Limit Diagram For Aisi 1008 Steel Sheet by Theoratical, Experimental and Fea Methodnsk143446Noch keine Bewertungen
- AGMA Publications Catalog 49 April 2020Dokument1 SeiteAGMA Publications Catalog 49 April 2020gioNoch keine Bewertungen
- Irjet-V8i12267 2Dokument7 SeitenIrjet-V8i12267 2Om SinghNoch keine Bewertungen
- Matecconf Eureca2020 03001Dokument13 SeitenMatecconf Eureca2020 03001Putra JokoNoch keine Bewertungen
- Grinding Wheel Performance EvaluationDokument10 SeitenGrinding Wheel Performance Evaluationanantj18Noch keine Bewertungen
- A Study On The Long-Term Performance Characteristics Conducted by The U.S. ArmyDokument9 SeitenA Study On The Long-Term Performance Characteristics Conducted by The U.S. ArmyManjit SinghNoch keine Bewertungen
- Lubrication and Wear in Forging - Gear Solutions Magazine Your Resource To The Gear IndustryDokument29 SeitenLubrication and Wear in Forging - Gear Solutions Magazine Your Resource To The Gear Industrynimesh singhNoch keine Bewertungen
- 07 VogelDokument10 Seiten07 VogelAnonymous OFwyjaMyNoch keine Bewertungen
- Selecting A Conveyor DriveDokument7 SeitenSelecting A Conveyor Drivegopi_ggg20016099Noch keine Bewertungen
- Gear DesignDokument10 SeitenGear DesignDragoș Gabriel Hrihor100% (2)
- Brake Roughness - Disc Brake Torque Variation, Rotor Distortion and Vehicle ResponseDokument15 SeitenBrake Roughness - Disc Brake Torque Variation, Rotor Distortion and Vehicle Responsedebisi14140100% (1)
- PaigeDokument15 SeitenPaigeklomps_jrNoch keine Bewertungen
- Article Reliability - Calculation - Wind - Gearbox - Bearings en v00 HD PublicDokument15 SeitenArticle Reliability - Calculation - Wind - Gearbox - Bearings en v00 HD PublicChandru VelNoch keine Bewertungen
- Comparative Analysis of Tooth Root StrenDokument18 SeitenComparative Analysis of Tooth Root StrenErik DannunzioNoch keine Bewertungen
- Optimization of A Motorcycle Wheel RimDokument6 SeitenOptimization of A Motorcycle Wheel RimAnoop A KNoch keine Bewertungen
- Minimizing Shrinkage Porosity by Optimizing Some Parameters of Al Alloy (6061T6) Using DOEDokument11 SeitenMinimizing Shrinkage Porosity by Optimizing Some Parameters of Al Alloy (6061T6) Using DOEIJRASETPublicationsNoch keine Bewertungen
- Backlash Prediction of A Spur Gear Pair With Manufacturing Errors of Runouts, Span and Pitch DeviationsDokument18 SeitenBacklash Prediction of A Spur Gear Pair With Manufacturing Errors of Runouts, Span and Pitch DeviationsChandrashekarNoch keine Bewertungen
- Ijdmt: ©iaemeDokument11 SeitenIjdmt: ©iaemeIAEME PublicationNoch keine Bewertungen
- Machine Tool 2007Dokument15 SeitenMachine Tool 2007simioncristescuNoch keine Bewertungen
- Quality Index For Friction Stir Welds in 7050 Aluminum PlatesDokument10 SeitenQuality Index For Friction Stir Welds in 7050 Aluminum PlatesGabriel AguirreNoch keine Bewertungen
- A New Model For Static Load Ratings of Surface Induction Hardened BearingsDokument3 SeitenA New Model For Static Load Ratings of Surface Induction Hardened Bearingsmans2014Noch keine Bewertungen
- Research Paper On Ball BearingDokument5 SeitenResearch Paper On Ball Bearingfvfee39d100% (1)
- ISBN: 1-55589-839-4 Pages: 56: AGMA Publications Catalog 19 April 2020Dokument1 SeiteISBN: 1-55589-839-4 Pages: 56: AGMA Publications Catalog 19 April 2020gioNoch keine Bewertungen
- Converting Design To PrototypeDokument4 SeitenConverting Design To PrototypeRrdbjdNoch keine Bewertungen
- Rotordynamic Design Optimization of A Steam Turbine Rotor Bearing SystemDokument72 SeitenRotordynamic Design Optimization of A Steam Turbine Rotor Bearing SystemTarkan KaragozNoch keine Bewertungen
- FlenderDokument2 SeitenFlenderpablo_stzNoch keine Bewertungen
- Aluminum-Bronze Sand Castings: Standard Specification ForDokument5 SeitenAluminum-Bronze Sand Castings: Standard Specification Forpablo_stzNoch keine Bewertungen
- This Kisssoft Demoversion May Not Be Used For Professional Application ! Important Hint: at Least One Warning Has Occurred During The CalculationDokument7 SeitenThis Kisssoft Demoversion May Not Be Used For Professional Application ! Important Hint: at Least One Warning Has Occurred During The Calculationpablo_stzNoch keine Bewertungen
- Oil Absorption of Pigments by Gardner-Coleman Method: Standard Test Method ForDokument2 SeitenOil Absorption of Pigments by Gardner-Coleman Method: Standard Test Method Forpablo_stzNoch keine Bewertungen
- Agma 910-C90Dokument35 SeitenAgma 910-C90pablo_stz100% (3)
- Tabela de Referencia OleosDokument1 SeiteTabela de Referencia OleosMauro S Cabral67% (18)
- Document 1Dokument5 SeitenDocument 1pablo_stzNoch keine Bewertungen
- PROPOSALDokument4 SeitenPROPOSALsacheendra singhNoch keine Bewertungen
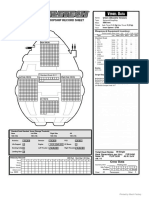
- Union Class Dropship 3025Dokument1 SeiteUnion Class Dropship 3025A KNoch keine Bewertungen
- Intructional Tools With The Integration of TechnologyDokument44 SeitenIntructional Tools With The Integration of TechnologyAlwyn SacandalNoch keine Bewertungen
- ERP Final PPT 22-4Dokument10 SeitenERP Final PPT 22-4ramesh pokhriyaalNoch keine Bewertungen
- Crew Body Temp: Arrival ArrivalDokument1 SeiteCrew Body Temp: Arrival ArrivalАлександр ГриднёвNoch keine Bewertungen
- Helicoil Plus en 0100Dokument56 SeitenHelicoil Plus en 0100Khổng MạnhNoch keine Bewertungen
- Bagheri Gavkosh2021Dokument17 SeitenBagheri Gavkosh2021Dan Alfred SebualaNoch keine Bewertungen
- Islm ModelDokument7 SeitenIslm ModelPrastuti SachanNoch keine Bewertungen
- 147380-1 Motoman XRC Controller Fieldbus (XFB01) Instruction ManualDokument102 Seiten147380-1 Motoman XRC Controller Fieldbus (XFB01) Instruction Manualrubi monNoch keine Bewertungen
- Amendment Notes For June 2021Dokument32 SeitenAmendment Notes For June 2021arohi gupta0% (2)
- ProEXR ManualDokument44 SeitenProEXR ManualSabine BNoch keine Bewertungen
- IELTS Speaking Forecast Tháng 1-4Dokument21 SeitenIELTS Speaking Forecast Tháng 1-4Toby ThomasNoch keine Bewertungen
- Difference Between Distinct and Group byDokument1 SeiteDifference Between Distinct and Group byPavelStrelkovNoch keine Bewertungen
- CodeDokument2 SeitenCodeJoao BatistaNoch keine Bewertungen
- Az 203 PDFDokument337 SeitenAz 203 PDFViktors PetrinaksNoch keine Bewertungen
- Kamaka Company Catalogue 2016 PDFDokument13 SeitenKamaka Company Catalogue 2016 PDFWendy0% (3)
- Finaldis2011 1Dokument4 SeitenFinaldis2011 1syaiful.idzwanNoch keine Bewertungen
- HPDokument71 SeitenHPRazvan OracelNoch keine Bewertungen
- Kathrein 739624Dokument2 SeitenKathrein 739624anna.bNoch keine Bewertungen
- Pas 16 - Property Plant and EquipmentDokument4 SeitenPas 16 - Property Plant and EquipmentJessie ForpublicuseNoch keine Bewertungen
- Ass2 mkt1009Dokument11 SeitenAss2 mkt1009thang5423Noch keine Bewertungen
- Calculation of Work IndexDokument5 SeitenCalculation of Work IndexEnryan Oreski RiyadiNoch keine Bewertungen
- Ch03 Kinetics of Particles - Energy&Momentum Methods - Part 1Dokument48 SeitenCh03 Kinetics of Particles - Energy&Momentum Methods - Part 1Mehmet Fatih SunçaNoch keine Bewertungen
- The Effect of Bicarbonate Additive On Corrosion ResistanceDokument11 SeitenThe Effect of Bicarbonate Additive On Corrosion ResistancebexigaobrotherNoch keine Bewertungen
- Improving The Passenger Experience: Monitoring Airport Quality of ServiceDokument6 SeitenImproving The Passenger Experience: Monitoring Airport Quality of ServiceParisa HadidianNoch keine Bewertungen
- Profitability Analysis (Sapphire Fibres Limited)Dokument5 SeitenProfitability Analysis (Sapphire Fibres Limited)Aqsa MoizNoch keine Bewertungen
- 93 .SG, CBR, MDD, PI, SP - GRDokument11 Seiten93 .SG, CBR, MDD, PI, SP - GRChandra Prakash KarkiNoch keine Bewertungen
- Share Purchase Agreement Short FormDokument7 SeitenShare Purchase Agreement Short FormGerald HansNoch keine Bewertungen
- Programa de Formacion: English Dot Works 2Dokument4 SeitenPrograma de Formacion: English Dot Works 2Juan GuerreroNoch keine Bewertungen
- Universal Declaration of Human RightsDokument36 SeitenUniversal Declaration of Human RightsJanine Regalado100% (4)
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesVon EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesBewertung: 5 von 5 Sternen5/5 (1)
- Electronics All-in-One For Dummies, 3rd EditionVon EverandElectronics All-in-One For Dummies, 3rd EditionBewertung: 5 von 5 Sternen5/5 (2)
- Digital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosVon EverandDigital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosBewertung: 5 von 5 Sternen5/5 (1)
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsVon EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsBewertung: 3.5 von 5 Sternen3.5/5 (2)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialVon EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialBewertung: 3.5 von 5 Sternen3.5/5 (3)
- Analog Design and Simulation Using OrCAD Capture and PSpiceVon EverandAnalog Design and Simulation Using OrCAD Capture and PSpiceNoch keine Bewertungen
- Programming the Raspberry Pi, Third Edition: Getting Started with PythonVon EverandProgramming the Raspberry Pi, Third Edition: Getting Started with PythonBewertung: 5 von 5 Sternen5/5 (2)
- Electrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tVon EverandElectrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tBewertung: 4.5 von 5 Sternen4.5/5 (27)
- Teach Yourself Electricity and Electronics, 6th EditionVon EverandTeach Yourself Electricity and Electronics, 6th EditionBewertung: 3.5 von 5 Sternen3.5/5 (15)
- Heat Transfer Engineering: Fundamentals and TechniquesVon EverandHeat Transfer Engineering: Fundamentals and TechniquesBewertung: 4 von 5 Sternen4/5 (1)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeVon EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeBewertung: 4.5 von 5 Sternen4.5/5 (10)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersVon Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersBewertung: 5 von 5 Sternen5/5 (1)
- Build Your Own Electronics WorkshopVon EverandBuild Your Own Electronics WorkshopBewertung: 3.5 von 5 Sternen3.5/5 (3)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionVon EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionBewertung: 4.5 von 5 Sternen4.5/5 (543)
- Upcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)Von EverandUpcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)Bewertung: 4.5 von 5 Sternen4.5/5 (2)
- The Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesVon EverandThe Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesBewertung: 5 von 5 Sternen5/5 (1)
- Current Interruption Transients CalculationVon EverandCurrent Interruption Transients CalculationBewertung: 4 von 5 Sternen4/5 (1)
- Power Electronics Diploma Interview Q&A: Career GuideVon EverandPower Electronics Diploma Interview Q&A: Career GuideNoch keine Bewertungen
- Introduction to Power System ProtectionVon EverandIntroduction to Power System ProtectionNoch keine Bewertungen