Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- (Regular) : Env - Edu Exam: QUALIFIED Eth & HV Exam: QualifiedDokument1 Seite(Regular) : Env - Edu Exam: QUALIFIED Eth & HV Exam: Qualifiedtnj_dineshNoch keine Bewertungen
- (Regular) : Env - Edu Exam: QUALIFIED Eth & HV Exam: QualifiedDokument1 Seite(Regular) : Env - Edu Exam: QUALIFIED Eth & HV Exam: Qualifiedtnj_dineshNoch keine Bewertungen
- (Regular) : Env - Edu Exam: QUALIFIED Eth & HV Exam: QualifiedDokument1 Seite(Regular) : Env - Edu Exam: QUALIFIED Eth & HV Exam: Qualifiedtnj_dineshNoch keine Bewertungen
- (Regular) : Env - Edu Exam: QUALIFIED Eth & HV Exam: QualifiedDokument1 Seite(Regular) : Env - Edu Exam: QUALIFIED Eth & HV Exam: Qualifiedtnj_dineshNoch keine Bewertungen
- BTMTI2224046Dokument1 SeiteBTMTI2224046tnj_dineshNoch keine Bewertungen
- (Regular) : Env - Edu Exam: QUALIFIED Eth & HV Exam: QualifiedDokument1 Seite(Regular) : Env - Edu Exam: QUALIFIED Eth & HV Exam: Qualifiedtnj_dineshNoch keine Bewertungen
- BTMTI2221408Dokument1 SeiteBTMTI2221408tnj_dineshNoch keine Bewertungen
- MathQuestionPaper2015 PDFDokument3 SeitenMathQuestionPaper2015 PDFsumit67Noch keine Bewertungen
- LPC 2148 UserDokument348 SeitenLPC 2148 UserpavankrishnatNoch keine Bewertungen
- Telangana State Board of Intermediate Education: Hyderabad: Online Memorandum of MarksDokument1 SeiteTelangana State Board of Intermediate Education: Hyderabad: Online Memorandum of Markstnj_dineshNoch keine Bewertungen
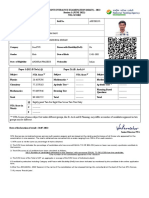
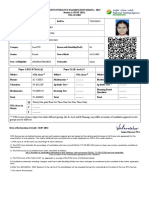
- HSE (+2) Examination Results May 2022: Government of Tamil Nadu Directorate of Government ExaminationsDokument1 SeiteHSE (+2) Examination Results May 2022: Government of Tamil Nadu Directorate of Government Examinationstnj_dineshNoch keine Bewertungen
- (Https://digilocker - Gov.in/) : Are You A Foreign CBSE Student?Dokument1 Seite(Https://digilocker - Gov.in/) : Are You A Foreign CBSE Student?tnj_dineshNoch keine Bewertungen
- (Https://digilocker - Gov.in/) : Are You A Foreign CBSE Student?Dokument1 Seite(Https://digilocker - Gov.in/) : Are You A Foreign CBSE Student?tnj_dineshNoch keine Bewertungen
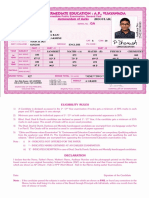
- Andhra Pradesh Intermediate Public Examinations II Year (General) 2022 ResultsDokument1 SeiteAndhra Pradesh Intermediate Public Examinations II Year (General) 2022 Resultstnj_dineshNoch keine Bewertungen
- WW - Perpetual - Except - Americas - July - 2018 RF CoE PDFDokument15 SeitenWW - Perpetual - Except - Americas - July - 2018 RF CoE PDFtnj_dineshNoch keine Bewertungen
- Algebra Home WorkDokument3 SeitenAlgebra Home Worktnj_dineshNoch keine Bewertungen
- FeeDokument1 SeiteFeetnj_dineshNoch keine Bewertungen
- Pic 16F877Dokument218 SeitenPic 16F877Jorge AlbertoNoch keine Bewertungen
- BiomedDokument107 SeitenBiomedkarthickchloroNoch keine Bewertungen
- Antenna and Wave Propagation - G. S. N. Raju PDFDokument95 SeitenAntenna and Wave Propagation - G. S. N. Raju PDFY Shak KmNoch keine Bewertungen
- Avspoof Dataset End User License Agreement (07/2012) : Data-Manager@idiap - CHDokument4 SeitenAvspoof Dataset End User License Agreement (07/2012) : Data-Manager@idiap - CHtnj_dineshNoch keine Bewertungen
- Design and Analysis of 10-Transistor Full Adders Using Novel Xor-Xnor GatesDokument4 SeitenDesign and Analysis of 10-Transistor Full Adders Using Novel Xor-Xnor Gatestnj_dineshNoch keine Bewertungen
- 984646Dokument11 Seiten984646tnj_dineshNoch keine Bewertungen
- 8051 ManualDokument334 Seiten8051 Manualapi-3776064100% (1)
- Clustering Algo.Dokument37 SeitenClustering Algo.tnj_dineshNoch keine Bewertungen
- Writing Device Drivers in LinuxDokument35 SeitenWriting Device Drivers in Linuxtnj_dineshNoch keine Bewertungen
- TMS320 C 50Dokument774 SeitenTMS320 C 50tnj_dineshNoch keine Bewertungen
- Design of Analog CMOS Integrated Circuits (Behzad Razavi) MarcadoDokument706 SeitenDesign of Analog CMOS Integrated Circuits (Behzad Razavi) MarcadoAminAbed100% (4)
- Tms 320 C 5 XDokument764 SeitenTms 320 C 5 XToby Joseph Thomas100% (2)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Access 2007 Connection String SamplesDokument3 SeitenAccess 2007 Connection String SamplesjaeinNoch keine Bewertungen
- 1-Foundations (EID REHMAN)Dokument73 Seiten1-Foundations (EID REHMAN)Farhana Aijaz100% (1)
- HEC-HMS Stylesheet Reports Guide PDFDokument7 SeitenHEC-HMS Stylesheet Reports Guide PDFLEELAKERNoch keine Bewertungen
- R09-Adhoc and Sensor NetworksDokument1 SeiteR09-Adhoc and Sensor NetworksSuresh ThallapelliNoch keine Bewertungen
- The Programmers Guide To TheoryDokument214 SeitenThe Programmers Guide To Theory3chelonNoch keine Bewertungen
- OS Lab ManualDokument27 SeitenOS Lab ManualMohammed BilalNoch keine Bewertungen
- Algoritmul FEALDokument20 SeitenAlgoritmul FEALnanacitesteNoch keine Bewertungen
- C, C++ & JavaDokument297 SeitenC, C++ & JavaSachin Saini0% (1)
- Lecture Notes For Math-CSE 451: Introduction To Numerical ComputationDokument102 SeitenLecture Notes For Math-CSE 451: Introduction To Numerical ComputationAhmad Amlq100% (1)
- Proposing A 3 D Doll Object Using Opengl-Based Key Glut FunctionsDokument3 SeitenProposing A 3 D Doll Object Using Opengl-Based Key Glut FunctionsZONA WIJAYA PUTRA0% (1)
- ITEC 1010 Final Exam ReviewDokument6 SeitenITEC 1010 Final Exam ReviewKelvin KongNoch keine Bewertungen
- Basaltesentidoiov1 1helpDokument2 SeitenBasaltesentidoiov1 1helpVishal SuryawaniNoch keine Bewertungen
- ETL Benchmark Favours DataStage and TalendDokument12 SeitenETL Benchmark Favours DataStage and TalendJunior LeiteNoch keine Bewertungen
- Embedded SystemDokument42 SeitenEmbedded SystemAssini HussainNoch keine Bewertungen
- Interpolare LagrangeDokument9 SeitenInterpolare Lagrangedragos_bogdan1974Noch keine Bewertungen
- SS G516 Computer Organization and Software Systems: Nirmal K Gupta Nirmalgupta@bits-Pilani - Ac.inDokument14 SeitenSS G516 Computer Organization and Software Systems: Nirmal K Gupta Nirmalgupta@bits-Pilani - Ac.inNirmal GuptaNoch keine Bewertungen
- And Dev DatabaseDokument30 SeitenAnd Dev DatabaseAnna LaClairNoch keine Bewertungen
- Tutorial: Introducing Autocad Map 3D 2012: Lesson 1: Get Ready To Use The TutorialsDokument32 SeitenTutorial: Introducing Autocad Map 3D 2012: Lesson 1: Get Ready To Use The TutorialsprofsovaNoch keine Bewertungen
- Infosphere Information Server InstallationDokument7 SeitenInfosphere Information Server InstallationsrimkbNoch keine Bewertungen
- AS-022 Computing A Compliance Matrix Using Utility Subroutine GTCMATDokument7 SeitenAS-022 Computing A Compliance Matrix Using Utility Subroutine GTCMATBas RamuNoch keine Bewertungen
- Pharmacy Management System SRSDokument12 SeitenPharmacy Management System SRSKashif Khan50% (2)
- CCMS RegistrationDokument4 SeitenCCMS RegistrationShivam MittalNoch keine Bewertungen
- SAP Application Interface Framework 30 enDokument186 SeitenSAP Application Interface Framework 30 envahluwaNoch keine Bewertungen
- Intronix: 34 Channel La1034 Logicport Logic AnalyzerDokument2 SeitenIntronix: 34 Channel La1034 Logicport Logic AnalyzerbogrocaNoch keine Bewertungen
- How To Unlock HR User in Oracle Database 12cDokument11 SeitenHow To Unlock HR User in Oracle Database 12camit_iihtdhn280Noch keine Bewertungen
- Oracleforms 12210 Newfeatures 2906037Dokument23 SeitenOracleforms 12210 Newfeatures 2906037Ezzudien Khames HamedNoch keine Bewertungen
- How To Add ModulesDokument7 SeitenHow To Add ModulesAnkit GuptaNoch keine Bewertungen
- TMN ArchitectureDokument4 SeitenTMN ArchitectureNitu Jha SaksenaNoch keine Bewertungen
- Big 2 PDFDokument62 SeitenBig 2 PDFCretu RazvanNoch keine Bewertungen
- SRS4 0Dokument30 SeitenSRS4 0Moses MNoch keine Bewertungen