Das könnte Ihnen auch gefallen
- ECM 206 Site VisitDokument36 SeitenECM 206 Site VisitAZUAN BIN AHMAD FAUZI100% (2)
- As 4587-1999 Water Mist Fire Protection Systems - System Design Installation and CommissioningDokument10 SeitenAs 4587-1999 Water Mist Fire Protection Systems - System Design Installation and CommissioningSAI Global - APAC100% (1)
- Auto Transformer Insulation Coordination StudyDokument6 SeitenAuto Transformer Insulation Coordination StudyrajfabNoch keine Bewertungen
- Interpreting The Venus CycleDokument2 SeitenInterpreting The Venus Cyclemurx2100% (1)
- Transmission Line Transposition On ATPDrawDokument4 SeitenTransmission Line Transposition On ATPDrawRogerio Lucena100% (1)
- Capacitor DigsilentDokument5 SeitenCapacitor DigsilentAnonymous SXkhNw2wENoch keine Bewertungen
- Of in EGAT 500 Transinission System: An Analysis Switching Overvoltages KVDokument5 SeitenOf in EGAT 500 Transinission System: An Analysis Switching Overvoltages KVKarina LozadaNoch keine Bewertungen
- High Frequency Transformers For DC-DC ConvertersDokument6 SeitenHigh Frequency Transformers For DC-DC ConvertersÄlî VàráNoch keine Bewertungen
- Sensitivity Studies On Power Transformer Ferroresonance of 400kVDokument8 SeitenSensitivity Studies On Power Transformer Ferroresonance of 400kV_FlyMan_Noch keine Bewertungen
- Three Phase Transformer Model For TransientsDokument10 SeitenThree Phase Transformer Model For TransientsYeissonSanabriaNoch keine Bewertungen
- Shaft VoltagesDokument27 SeitenShaft VoltagesMathi JS MatharooNoch keine Bewertungen
- Power Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesVon EverandPower Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesNoch keine Bewertungen
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlVon EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlBewertung: 5 von 5 Sternen5/5 (1)
- Suppressing of Common-Mode Voltage, Shaft Voltage, Leakage Current and EMI Generated by Voltage Source PWM InverterDokument7 SeitenSuppressing of Common-Mode Voltage, Shaft Voltage, Leakage Current and EMI Generated by Voltage Source PWM InverterFaissal RachmanNoch keine Bewertungen
- Tarns Mission Line Performance (No Load)Dokument6 SeitenTarns Mission Line Performance (No Load)Mohamed Faisal75% (4)
- Tavistock PrimerDokument13 SeitenTavistock PrimerSharon Schaff100% (1)
- Analysis of Very Fast Transients in Layer-Type Transformer WindingsDokument10 SeitenAnalysis of Very Fast Transients in Layer-Type Transformer WindingsZaid Luna LopezNoch keine Bewertungen
- A HandBook On Finacle Work Flow Process 1st EditionDokument79 SeitenA HandBook On Finacle Work Flow Process 1st EditionSpos Udupi100% (2)
- 027 03 Dec13 CseDokument647 Seiten027 03 Dec13 CseParth NagarNoch keine Bewertungen
- Study of Impulse Voltage Distribution in Transformer WindingsDokument5 SeitenStudy of Impulse Voltage Distribution in Transformer WindingsBhuvanes Waran100% (1)
- High Frequency Modeling of Induction Motor Drives ForDokument7 SeitenHigh Frequency Modeling of Induction Motor Drives ForIoan ŢileaNoch keine Bewertungen
- Characterization of Conducted EMI Generated by Switched Power ConvertersDokument3 SeitenCharacterization of Conducted EMI Generated by Switched Power ConvertersskrtamilNoch keine Bewertungen
- Electromagnetic Interference Modeling Research On The Electrical Machine and Converter SystemsDokument4 SeitenElectromagnetic Interference Modeling Research On The Electrical Machine and Converter SystemsjaynepalNoch keine Bewertungen
- Low Cost' Three Phase To Single Phase Matrix ConverterDokument6 SeitenLow Cost' Three Phase To Single Phase Matrix ConverterRaghu RamNoch keine Bewertungen
- Sensitivity Studies On Power Transformer Ferroresonance of A 400 KV Double CircuitDokument8 SeitenSensitivity Studies On Power Transformer Ferroresonance of A 400 KV Double Circuitmohammadi123456Noch keine Bewertungen
- Line Differential Protection Scheme Modelling (PDF Library)Dokument6 SeitenLine Differential Protection Scheme Modelling (PDF Library)Nirmal RajaNoch keine Bewertungen
- A Norton Model of A Distribution Network For Harmonic EvaluationDokument7 SeitenA Norton Model of A Distribution Network For Harmonic Evaluationbubo28Noch keine Bewertungen
- Unified Model of PWM Switch Including Inductor in DCM (0074 1Dokument2 SeitenUnified Model of PWM Switch Including Inductor in DCM (0074 1Jesús MendozaNoch keine Bewertungen
- Power Cable High Freq ModelDokument7 SeitenPower Cable High Freq ModelkrcdewanewNoch keine Bewertungen
- UPFC Using Multiconverter Operated by Phase-Shifted Triangle Carrier SPWM StrategyDokument6 SeitenUPFC Using Multiconverter Operated by Phase-Shifted Triangle Carrier SPWM StrategyjaiminNoch keine Bewertungen
- Circuit Simulation of Varactor Loaded Line Phase Shifter: V C V CDokument4 SeitenCircuit Simulation of Varactor Loaded Line Phase Shifter: V C V CdhvbkhnNoch keine Bewertungen
- 13IPST121Dokument7 Seiten13IPST121Anonymous 9VcxlFErfNoch keine Bewertungen
- PV Model 5Dokument5 SeitenPV Model 5ED-Daaif M'barkNoch keine Bewertungen
- Modeling of Electric Motors For Electromagnetic Compatibility AnalysisDokument5 SeitenModeling of Electric Motors For Electromagnetic Compatibility AnalysisRudanekNoch keine Bewertungen
- Maswood 01035144Dokument9 SeitenMaswood 01035144rahulanlNoch keine Bewertungen
- Research On DC Transient Overvolatge and Insulation Coordination of 800kV Converter StationDokument4 SeitenResearch On DC Transient Overvolatge and Insulation Coordination of 800kV Converter StationKalyan SrinivasNoch keine Bewertungen
- Introduction To Electromagnetic CompatibilityDokument6 SeitenIntroduction To Electromagnetic CompatibilityIoan ŢileaNoch keine Bewertungen
- Analysis of Single Phase Matrix ConverterDokument6 SeitenAnalysis of Single Phase Matrix ConverterNarhari AhirraoNoch keine Bewertungen
- Modified Multilevel Inverter Topology For Grid Connected PV SystemsDokument7 SeitenModified Multilevel Inverter Topology For Grid Connected PV SystemsAJER JOURNALNoch keine Bewertungen
- VFT Study For EHV-GIS Substation: Amit Kumar and Mahesh K. MishraDokument6 SeitenVFT Study For EHV-GIS Substation: Amit Kumar and Mahesh K. Mishraarunw110Noch keine Bewertungen
- Harmonic Reduction of Arc Furnaces Using D-Statcom: S.Pushpavalli, A. CordeliasumathyDokument8 SeitenHarmonic Reduction of Arc Furnaces Using D-Statcom: S.Pushpavalli, A. CordeliasumathyIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNoch keine Bewertungen
- 3-Phase PFC KolarDokument7 Seiten3-Phase PFC KolarJayant SalianNoch keine Bewertungen
- Controlled-Current: ConverterDokument7 SeitenControlled-Current: ConverterRamphani NunnaNoch keine Bewertungen
- AM28 A Single-Phase Photovoltaic Inverter Topology With A Series-Connected Energy BufferDokument9 SeitenAM28 A Single-Phase Photovoltaic Inverter Topology With A Series-Connected Energy BufferReddy KvmNoch keine Bewertungen
- A New Control Methods For Offshore Grid Connected Wind Energy Conversion System UsingDokument19 SeitenA New Control Methods For Offshore Grid Connected Wind Energy Conversion System UsingIAEME PublicationNoch keine Bewertungen
- Modeling of High Frequency Characteristic of A 6.6 KV TransformerDokument7 SeitenModeling of High Frequency Characteristic of A 6.6 KV TransformeraocalayNoch keine Bewertungen
- An EMTP - RV Based Analysis of The Line SurgeDokument6 SeitenAn EMTP - RV Based Analysis of The Line SurgeEleazar Sierra EspinozaNoch keine Bewertungen
- A Survey On Neutral Point Clamped Multi Level InverterDokument12 SeitenA Survey On Neutral Point Clamped Multi Level InverterrupaNoch keine Bewertungen
- Current Mode Versus Voltage ModeDokument14 SeitenCurrent Mode Versus Voltage ModeqwertypointNoch keine Bewertungen
- A Voltage-Mode PWM Buck Regulator With End-Point PredictionDokument5 SeitenA Voltage-Mode PWM Buck Regulator With End-Point PredictionWen DwenNoch keine Bewertungen
- 1C UG GourammisDokument7 Seiten1C UG Gourammisgosalhs9395Noch keine Bewertungen
- Backflashover Analysis For 110-kV Lines at Multi-Circuit Overhead Line TowersDokument6 SeitenBackflashover Analysis For 110-kV Lines at Multi-Circuit Overhead Line TowersboopelectraNoch keine Bewertungen
- Reduction of Electromagnetic Interference in DC-DC Converter Using ChaosDokument4 SeitenReduction of Electromagnetic Interference in DC-DC Converter Using ChaosPrasenjit WakodeNoch keine Bewertungen
- Impact of Variable Switching Frequency Over Power Loss On Converter TopologiesDokument6 SeitenImpact of Variable Switching Frequency Over Power Loss On Converter TopologiesskrtamilNoch keine Bewertungen
- Multistring Five-Level Inverter With Novel PWMDokument13 SeitenMultistring Five-Level Inverter With Novel PWMsandeepbabu28Noch keine Bewertungen
- Comparison of HVDC Line Models in PSB Simulink BasedDokument6 SeitenComparison of HVDC Line Models in PSB Simulink BasedAlan DrewNoch keine Bewertungen
- Improved Coupled-Microstrip Filter Design Using Effective Even-Mode and Odd-Mode Characteristic ImpedancesDokument7 SeitenImproved Coupled-Microstrip Filter Design Using Effective Even-Mode and Odd-Mode Characteristic ImpedancesAli SigNoch keine Bewertungen
- A High Frequency Equivalent Circuit and Parameter Extraction Procedure For Common Mode Choke in The EMI FilterDokument10 SeitenA High Frequency Equivalent Circuit and Parameter Extraction Procedure For Common Mode Choke in The EMI FilterYea Ji HanNoch keine Bewertungen
- Practical Control of Switching Overvoltages by Switch-Sync Controller PDFDokument6 SeitenPractical Control of Switching Overvoltages by Switch-Sync Controller PDFkaushikray06Noch keine Bewertungen
- Single Phase Multi-Level PWM Inverter Topologies Using Coupled InductorsDokument7 SeitenSingle Phase Multi-Level PWM Inverter Topologies Using Coupled InductorskvhkrishnanNoch keine Bewertungen
- Analysis of Power Loss and Improved Simulation Method of A High Frequency Dual-Buck Full-Bridge InverterDokument18 SeitenAnalysis of Power Loss and Improved Simulation Method of A High Frequency Dual-Buck Full-Bridge InverteranujNoch keine Bewertungen
- Contactless Energy TransferDokument34 SeitenContactless Energy TransferHarshith HarshNoch keine Bewertungen
- Modelling and Analysis of Transformer Winding at High FrequenciesDokument7 SeitenModelling and Analysis of Transformer Winding at High FrequenciesFlores JesusNoch keine Bewertungen
- Aggeler SmartEnergyStrategies2008 1Dokument2 SeitenAggeler SmartEnergyStrategies2008 1Akshay SathianNoch keine Bewertungen
- Survey of CascadeDokument10 SeitenSurvey of Cascadesumiths32Noch keine Bewertungen
- MCDokument10 SeitenMCK.k. HariNoch keine Bewertungen
- Switched-Capacitor-Cell-Based Voltage Multipliers and DC-AC InvertersDokument12 SeitenSwitched-Capacitor-Cell-Based Voltage Multipliers and DC-AC Invertersvinay kumarNoch keine Bewertungen
- CT Application Guide v1.0Dokument4 SeitenCT Application Guide v1.0Ioan ŢileaNoch keine Bewertungen
- Transient of Power Pulse and Its Sequence inDokument10 SeitenTransient of Power Pulse and Its Sequence inIoan ŢileaNoch keine Bewertungen
- TGN Restricted Earth Fault v1 - 0Dokument40 SeitenTGN Restricted Earth Fault v1 - 0Anonymous dqbb02DUhNoch keine Bewertungen
- Readme DIGSI 5 Upgrade Guideline PDFDokument8 SeitenReadme DIGSI 5 Upgrade Guideline PDFg-bearNoch keine Bewertungen
- WEG Induction Motors Fed by PWM Frequency Converters Technical Guide 028 Technical Article EnglishDokument36 SeitenWEG Induction Motors Fed by PWM Frequency Converters Technical Guide 028 Technical Article EnglishSreedhar SvNoch keine Bewertungen
- Zice de Series ResonanceDokument8 SeitenZice de Series ResonanceIoan ŢileaNoch keine Bewertungen
- SL Gsec (En) - 1VCP000480 PDFDokument15 SeitenSL Gsec (En) - 1VCP000480 PDFIoan ŢileaNoch keine Bewertungen
- Theoretical and Experimental Investigation of Parasitic BDokument7 SeitenTheoretical and Experimental Investigation of Parasitic BIoan ŢileaNoch keine Bewertungen
- Possible Problems and Solutions When Introducing Variable Speed DrivesDokument6 SeitenPossible Problems and Solutions When Introducing Variable Speed DrivesIoan ŢileaNoch keine Bewertungen
- Rezonanta La MotorDokument5 SeitenRezonanta La MotorIoan ŢileaNoch keine Bewertungen
- Static Frequency Converters With Reduced Parasitic EffectsDokument6 SeitenStatic Frequency Converters With Reduced Parasitic EffectsIoan ŢileaNoch keine Bewertungen
- The Effect of Impedance Mismatch OnDokument4 SeitenThe Effect of Impedance Mismatch OnIoan ŢileaNoch keine Bewertungen
- Prediction of CM Conducted EMI in PWM Inverter-Fed Machine SystemDokument4 SeitenPrediction of CM Conducted EMI in PWM Inverter-Fed Machine SystemIoan ŢileaNoch keine Bewertungen
- Propagation of Inverter Surge and Voltage Distribution in Motor WindingDokument10 SeitenPropagation of Inverter Surge and Voltage Distribution in Motor WindingIoan ŢileaNoch keine Bewertungen
- MasinaDokument7 SeitenMasinaIoan ŢileaNoch keine Bewertungen
- Introduction To Electromagnetic CompatibilityDokument6 SeitenIntroduction To Electromagnetic CompatibilityIoan ŢileaNoch keine Bewertungen
- Measurement of Conducted Electromagnetic Emissions inDokument6 SeitenMeasurement of Conducted Electromagnetic Emissions inIoan ŢileaNoch keine Bewertungen
- Modeling of Conducted Common Mode Perturbations BDokument10 SeitenModeling of Conducted Common Mode Perturbations BIoan ŢileaNoch keine Bewertungen
- Leakage Current and Common Mode VoltageDokument6 SeitenLeakage Current and Common Mode VoltageIoan Ţilea100% (1)
- IAS96 BearingDokument9 SeitenIAS96 BearingIoan ŢileaNoch keine Bewertungen
- High-Frequency Equivalent Circuit of An Induction Motor Driven by A PWMDokument12 SeitenHigh-Frequency Equivalent Circuit of An Induction Motor Driven by A PWMIoan ŢileaNoch keine Bewertungen
- Experimental High Frequency Parameter IdentificationDokument6 SeitenExperimental High Frequency Parameter IdentificationIoan ŢileaNoch keine Bewertungen
- Definition and Acquisition of CM and DM EM1 Noise For General-PurposeDokument6 SeitenDefinition and Acquisition of CM and DM EM1 Noise For General-PurposeIoan ŢileaNoch keine Bewertungen
- Filtrare Din Convertizor, Ce Metode Se Folosesc Pentru Reducere Emi, IntroducereDokument6 SeitenFiltrare Din Convertizor, Ce Metode Se Folosesc Pentru Reducere Emi, IntroducereIoan ŢileaNoch keine Bewertungen
- EMI in Modern ACDokument6 SeitenEMI in Modern ACnaver01Noch keine Bewertungen
- Converter Dependent Design of Induction Machines in The Power Range Below 1OMWDokument6 SeitenConverter Dependent Design of Induction Machines in The Power Range Below 1OMWIoan ŢileaNoch keine Bewertungen
- Common-Mode Current InductivelyDokument4 SeitenCommon-Mode Current InductivelyIoan ŢileaNoch keine Bewertungen
- Srinivasa Ramanujan Institute of TechnologyDokument2 SeitenSrinivasa Ramanujan Institute of TechnologyPandu RangareddyNoch keine Bewertungen
- 1-Perceived Threat of Covid-19 and T.I (Reference Article)Dokument10 Seiten1-Perceived Threat of Covid-19 and T.I (Reference Article)Hassan NadeemNoch keine Bewertungen
- Important Questions - BlockchainDokument1 SeiteImportant Questions - BlockchainHarsh Varshney100% (1)
- Tssiig GC e Module 1 PDFDokument6 SeitenTssiig GC e Module 1 PDFLoiweza AbagaNoch keine Bewertungen
- Please Complete The Information Requested Below: COMPANY NAME: X2 Logics Staffing Solution, IncDokument2 SeitenPlease Complete The Information Requested Below: COMPANY NAME: X2 Logics Staffing Solution, Incwasim riyazNoch keine Bewertungen
- PETSOC-98-02-06 Mattar, L. McNeil, R. The Flowing Gas-Material Balance PDFDokument4 SeitenPETSOC-98-02-06 Mattar, L. McNeil, R. The Flowing Gas-Material Balance PDFSolenti D'nouNoch keine Bewertungen
- Ansoff's Matrix: Presented by:-P.Deepika Naidu Raj PatilDokument17 SeitenAnsoff's Matrix: Presented by:-P.Deepika Naidu Raj PatilKritiYadavNoch keine Bewertungen
- Eng1-LAS MELC-3 FINALDokument10 SeitenEng1-LAS MELC-3 FINALFarrah Joy AguilarNoch keine Bewertungen
- 13 y 14. Schletter-SingleFix-V-Data-SheetDokument3 Seiten13 y 14. Schletter-SingleFix-V-Data-SheetDiego Arana PuelloNoch keine Bewertungen
- Program Documentation Lesson 10Dokument32 SeitenProgram Documentation Lesson 10Armechelyn DerechoNoch keine Bewertungen
- Acc Inter 3 AtsiriDokument9 SeitenAcc Inter 3 AtsiriZania Putri100% (1)
- Module 6: Stresses Around Underground Openings: 6.6 Excavation Shape and Boundary StressDokument10 SeitenModule 6: Stresses Around Underground Openings: 6.6 Excavation Shape and Boundary Stressفردوس سليمانNoch keine Bewertungen
- FZ1 Parts CatalogDokument78 SeitenFZ1 Parts CatalogAntonis Fotis100% (1)
- Elasticity and Damping of Avm-2055 Rubber Mounting Pads: Theoretical Determination and Experimental VerificationDokument7 SeitenElasticity and Damping of Avm-2055 Rubber Mounting Pads: Theoretical Determination and Experimental VerificationAnanya MishraNoch keine Bewertungen
- Staffing ProcessDokument18 SeitenStaffing ProcessEbtesam EliasNoch keine Bewertungen
- Overseas Assignment 18thseptDokument6 SeitenOverseas Assignment 18thseptSuresh VanierNoch keine Bewertungen
- Binary Arithmetic Operations: Prof. R.Ezhilarasie Assistant Professor School of Computing SASTRA Deemed To Be UniversityDokument26 SeitenBinary Arithmetic Operations: Prof. R.Ezhilarasie Assistant Professor School of Computing SASTRA Deemed To Be UniversityEzhil RamanathanNoch keine Bewertungen
- 4363 112 Heat TransferDokument6 Seiten4363 112 Heat Transferyogesh_b_kNoch keine Bewertungen
- CATEGORY - Green (III) Consent To EstablishDokument4 SeitenCATEGORY - Green (III) Consent To EstablishROOPDIP MUKHOPADHYAYNoch keine Bewertungen
- CNSB Bypass Separator Commissioning and Maintenance Guide: Conder® Tanks Covered by This GuideDokument4 SeitenCNSB Bypass Separator Commissioning and Maintenance Guide: Conder® Tanks Covered by This GuidesterlingNoch keine Bewertungen
- ResearchDokument12 SeitenResearchIsla, AltheaNoch keine Bewertungen
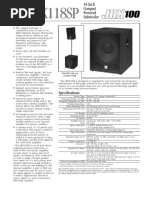
- JRX118SP SpecsheetDokument2 SeitenJRX118SP SpecsheetLuisNoch keine Bewertungen
- Service and Technology Marketing Service and Technology MarketingDokument27 SeitenService and Technology Marketing Service and Technology MarketingVinudeep MalalurNoch keine Bewertungen
- Purchasing Process Models Inspiration For Teac 2019 Journal of Purchasing ADokument11 SeitenPurchasing Process Models Inspiration For Teac 2019 Journal of Purchasing ASunita ChayalNoch keine Bewertungen