Das könnte Ihnen auch gefallen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Diabetes Reversal by Plant Based Diet Dr. BiswaroopDokument7 SeitenDiabetes Reversal by Plant Based Diet Dr. Biswaroopsatya_vanapalli3422100% (1)
- Tts Asr NareshDokument29 SeitenTts Asr Nareshsatya_vanapalli3422Noch keine Bewertungen
- 3.4.1 Impact of Extension ActivitiesDokument1 Seite3.4.1 Impact of Extension Activitiessatya_vanapalli3422Noch keine Bewertungen
- AIT Important Questions: 1) Explain The Concept of Biological Neuron Model With The Help of A Neat Diagram? AnswerDokument38 SeitenAIT Important Questions: 1) Explain The Concept of Biological Neuron Model With The Help of A Neat Diagram? Answersatya_vanapalli3422Noch keine Bewertungen
- Neural Networks and Fuzzy LogicDokument23 SeitenNeural Networks and Fuzzy Logicsatya_vanapalli3422Noch keine Bewertungen
- 1 Id - Ref 1/vnom - DC PI 2 VDC - Ref 1 VDC - MesDokument1 Seite1 Id - Ref 1/vnom - DC PI 2 VDC - Ref 1 VDC - Messatya_vanapalli3422Noch keine Bewertungen
- Neural Networks and Fuzzy LogicDokument18 SeitenNeural Networks and Fuzzy Logicsatya_vanapalli3422Noch keine Bewertungen
- 8-14 Magnetic Considerations: ReferencesDokument1 Seite8-14 Magnetic Considerations: Referencessatya_vanapalli3422Noch keine Bewertungen
- Analysis of Electric Machinery and Drive SystemsDokument3 SeitenAnalysis of Electric Machinery and Drive Systemssatya_vanapalli3422Noch keine Bewertungen
- AIT Important Questions: 1) Explain The Concept of Biological Neuron Model With The Help of A Neat Diagram? AnswerDokument23 SeitenAIT Important Questions: 1) Explain The Concept of Biological Neuron Model With The Help of A Neat Diagram? Answersatya_vanapalli3422Noch keine Bewertungen
- Voltage ControllerDokument1 SeiteVoltage Controllersatya_vanapalli3422Noch keine Bewertungen
- III Year Assignment-IIDokument39 SeitenIII Year Assignment-IIsatya_vanapalli3422Noch keine Bewertungen
- Eee Cocubes ListDokument4 SeitenEee Cocubes Listsatya_vanapalli3422Noch keine Bewertungen
- SecurityLimitsRemoval InternationalAuthorisation PDFDokument1 SeiteSecurityLimitsRemoval InternationalAuthorisation PDFsatya_vanapalli3422Noch keine Bewertungen
- 10Hr Course PDFDokument1 Seite10Hr Course PDFsatya_vanapalli3422Noch keine Bewertungen
- Day-Wise Absentees Statement-ECE 14.06.2016Dokument30 SeitenDay-Wise Absentees Statement-ECE 14.06.2016satya_vanapalli3422Noch keine Bewertungen
- Discipline Course Name Coordinators Institute Intro VideoDokument2 SeitenDiscipline Course Name Coordinators Institute Intro Videosatya_vanapalli3422Noch keine Bewertungen
- GE 6163 - Physics Lab Manual PDFDokument21 SeitenGE 6163 - Physics Lab Manual PDFsatya_vanapalli3422Noch keine Bewertungen
- Discipline Course Name Coordinators Institute Intro VideoDokument1 SeiteDiscipline Course Name Coordinators Institute Intro Videosatya_vanapalli3422Noch keine Bewertungen
- Andhra Pradesh State Council of Higher Education Ap Pgec/ Ap Pgecet - 2015 Admissions College Admitted ListDokument1 SeiteAndhra Pradesh State Council of Higher Education Ap Pgec/ Ap Pgecet - 2015 Admissions College Admitted Listsatya_vanapalli3422Noch keine Bewertungen
- 6TDokument15 Seiten6Tsatya_vanapalli3422Noch keine Bewertungen
- 8 THDokument12 Seiten8 THsatya_vanapalli3422Noch keine Bewertungen
- Cascaded Multilevel Inverter With Series Connection of Novel H-Bridge Basic UnitsDokument8 SeitenCascaded Multilevel Inverter With Series Connection of Novel H-Bridge Basic Unitssatya_vanapalli3422Noch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Work and Power 1 QPDokument13 SeitenWork and Power 1 QPIMJ JNoch keine Bewertungen
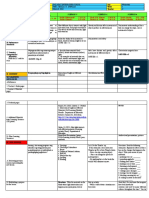
- DLL Q3 Week 4 Day 4Dokument11 SeitenDLL Q3 Week 4 Day 4Cecilia Guevarra DumlaoNoch keine Bewertungen
- TVH BulbsDokument24 SeitenTVH BulbsMelwyn FernandesNoch keine Bewertungen
- St. Paul'S Academy: Purba BardhamanDokument4 SeitenSt. Paul'S Academy: Purba BardhamanBHRAMAR DHARANoch keine Bewertungen
- RPT Physics STPM Term 2 2020Dokument8 SeitenRPT Physics STPM Term 2 2020marcella silunNoch keine Bewertungen
- Mechanics: Kinematics and DynamicsDokument4 SeitenMechanics: Kinematics and DynamicsSaifur RahmanNoch keine Bewertungen
- Eddy Current LossDokument20 SeitenEddy Current LossAnonymous bau06xStTNoch keine Bewertungen
- Class 12 Physics Chapter 1Dokument11 SeitenClass 12 Physics Chapter 1Garry BroNoch keine Bewertungen
- Work, Power & Energy - DPP 06 (Of Lec 11) - Arjuna JEE 2024Dokument3 SeitenWork, Power & Energy - DPP 06 (Of Lec 11) - Arjuna JEE 2024tejas gargNoch keine Bewertungen
- Tuesday 13999 BairdDokument16 SeitenTuesday 13999 BairdheyspamNoch keine Bewertungen
- Gas Insulated Substation: Electrical Engineering DepartmentDokument24 SeitenGas Insulated Substation: Electrical Engineering DepartmentChandrika Reddy2727Noch keine Bewertungen
- Dynamics Lab Manual - ME6511Dokument66 SeitenDynamics Lab Manual - ME6511vinothNoch keine Bewertungen
- Work, Energy and Power WorksheetDokument6 SeitenWork, Energy and Power Worksheetsmartamjad100% (1)
- Tortech eDokument23 SeitenTortech emuna7Noch keine Bewertungen
- Speed Control of Reluctance MotorDokument156 SeitenSpeed Control of Reluctance MotorSatyajit DasNoch keine Bewertungen
- Module13 TestDokument4 SeitenModule13 TestAaron BundaNoch keine Bewertungen
- MX-J200 Service ManualDokument70 SeitenMX-J200 Service ManualHectorNoch keine Bewertungen
- Dept. of Physics, Bangabasi College Kolkata, NPTEL Local ChapterDokument12 SeitenDept. of Physics, Bangabasi College Kolkata, NPTEL Local ChapterAnik GhoshNoch keine Bewertungen
- Basic Electronic Components (Post 1st Year Training ECE)Dokument23 SeitenBasic Electronic Components (Post 1st Year Training ECE)Cutie100% (4)
- High-Performance Magnetic Gears: Kais Atallah, Stuart D. Calverley, David HoweDokument3 SeitenHigh-Performance Magnetic Gears: Kais Atallah, Stuart D. Calverley, David HoweTrung PhanNoch keine Bewertungen
- Lecture 24: T-Junction and Resistive Power DividersDokument10 SeitenLecture 24: T-Junction and Resistive Power DividersWaleed SethiNoch keine Bewertungen
- Power TipsDokument3 SeitenPower TipsHector MadriagaNoch keine Bewertungen
- IcaDokument6 SeitenIcasruthiNoch keine Bewertungen
- Atkins Technical Journal 04Dokument164 SeitenAtkins Technical Journal 04Hasrina Mohd Ramazi100% (1)
- Emd-I AssignmentDokument6 SeitenEmd-I Assignmentayan PatelNoch keine Bewertungen
- Midterm Exam #2, Part ADokument6 SeitenMidterm Exam #2, Part AhariNoch keine Bewertungen
- AutosupdDokument13 SeitenAutosupdDokuparthi Naga Anjaneya PrasadNoch keine Bewertungen
- ME 213 - (Spring, 2024) - Chapter # 1Dokument27 SeitenME 213 - (Spring, 2024) - Chapter # 1omaruhu822Noch keine Bewertungen
- AIAA SDM 2015 Paper KierDokument13 SeitenAIAA SDM 2015 Paper KierAnmar Hamid AliNoch keine Bewertungen