Das könnte Ihnen auch gefallen
- Caracteristicas Robot-2c Controlador y Teach Box PDFDokument8 SeitenCaracteristicas Robot-2c Controlador y Teach Box PDFJohn VH100% (1)
- Presentacion R28TB 4Dokument18 SeitenPresentacion R28TB 4Carlos Eduardo Escobar CoreñoNoch keine Bewertungen
- Manual Prog CrsDokument50 SeitenManual Prog CrsJohn Pako Garza0% (1)
- Operaciones Melfa RV-2AJDokument3 SeitenOperaciones Melfa RV-2AJtudorimaNoch keine Bewertungen
- Robot Fanuc SeatDokument98 SeitenRobot Fanuc SeatAlberto Coronado Ocegueda100% (1)
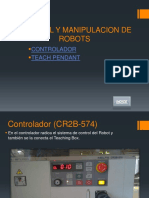
- Controlador Teach Mitsubishi RVDokument17 SeitenControlador Teach Mitsubishi RVJuanis UpItma100% (1)
- Descripcion Tecnica de Brazo Controlador Teach RV-2FBDokument15 SeitenDescripcion Tecnica de Brazo Controlador Teach RV-2FBSergio100% (1)
- Manual Usuario Mitsu OKDokument29 SeitenManual Usuario Mitsu OKRaul Francisco Coss MartinezNoch keine Bewertungen
- Programacion de Robot MitsubishiDokument9 SeitenProgramacion de Robot MitsubishiPedro Glez R100% (1)
- 5 Practicas Robot NachiDokument45 Seiten5 Practicas Robot NachiJavierJBV100% (1)
- Curso Basico Robot Fanuc UpaDokument57 SeitenCurso Basico Robot Fanuc UpaRene Axel Montes RochaNoch keine Bewertungen
- FanucDokument7 SeitenFanucJose LuisNoch keine Bewertungen
- Programación Básica Fanuc-KukaDokument250 SeitenProgramación Básica Fanuc-Kukakil100% (2)
- Programación Básica de Un Robot FanucDokument9 SeitenProgramación Básica de Un Robot Fanucdoniz3083% (6)
- Robot MitsubishiDokument26 SeitenRobot MitsubishiDracoRodriguezNoch keine Bewertungen
- 3.5 Anexos-Teclado-HassDokument7 Seiten3.5 Anexos-Teclado-HassInezukyNoch keine Bewertungen
- Informe Practica de RoboticaDokument7 SeitenInforme Practica de Roboticazintia mezaNoch keine Bewertungen
- Un Poco de Historia de La Robótica IndustrialDokument53 SeitenUn Poco de Historia de La Robótica IndustrialPablo Huerta iFunyNoch keine Bewertungen
- Manual RobotDokument12 SeitenManual RobotnespierNoch keine Bewertungen
- (Muy Bueno) FI Manual Torno CNC Ual 2012 2013Dokument42 Seiten(Muy Bueno) FI Manual Torno CNC Ual 2012 2013Linux ManNoch keine Bewertungen
- Puntos 3.5 y 3.6Dokument12 SeitenPuntos 3.5 y 3.6Joan Enrique Prado CabreraNoch keine Bewertungen
- Operacion de Robots CRSDokument46 SeitenOperacion de Robots CRSJorge L. Aguilar MartínezNoch keine Bewertungen
- Manual de Usuario RV-2AJDokument25 SeitenManual de Usuario RV-2AJRoberto Orozco Sanchez100% (2)
- Manual de Operación Del Torno CTX 210 GILDEMASTER Con Controlador SIMIENS Sinumerik 840DDokument77 SeitenManual de Operación Del Torno CTX 210 GILDEMASTER Con Controlador SIMIENS Sinumerik 840DAlonso Jasso100% (1)
- 302MillManual ESPDokument321 Seiten302MillManual ESPAnonymous ChPVCaroNoch keine Bewertungen
- Basico FanucDokument23 SeitenBasico FanucRicardo Jms100% (4)
- Curso Programacion Fanuc Guia RapidaDokument13 SeitenCurso Programacion Fanuc Guia Rapidaarturo dayneNoch keine Bewertungen
- Apuntes para Operacion y Programacion DeRobot CRSDokument47 SeitenApuntes para Operacion y Programacion DeRobot CRSMariana Rodriguez LopezNoch keine Bewertungen
- Dokumen - Tips - Guia Rapida Torno FanucDokument35 SeitenDokumen - Tips - Guia Rapida Torno FanucGianiMauricioQuinteroBautista100% (1)
- THERMOF3Dokument24 SeitenTHERMOF3Angeliica R CortèsNoch keine Bewertungen
- 2 Robot CS 113 Service ArmDokument9 Seiten2 Robot CS 113 Service ArmRui MendesNoch keine Bewertungen
- Reporte Práctica 3Dokument24 SeitenReporte Práctica 3Yolanda MartínezNoch keine Bewertungen
- Guia Rapida Torno DoosanDokument35 SeitenGuia Rapida Torno DoosanBruno Andres Alisters100% (7)
- 5 Practicas Robot Nachi PDFDokument45 Seiten5 Practicas Robot Nachi PDFPedro Bautista100% (1)
- Fanuc OM CNC ManualDokument23 SeitenFanuc OM CNC ManualPacheco “dickcorporation” PachecoNoch keine Bewertungen
- Guia Básica para Operación de Robot FanucDokument22 SeitenGuia Básica para Operación de Robot FanucHECTOR IBARRANoch keine Bewertungen
- D11T TRACK-TYPE TRACTOR AMA00001-UP (MACHINE) POWERED BY C32 Engine (SEBP5803 - 92) - Sistemas y Componentes PDFDokument37 SeitenD11T TRACK-TYPE TRACTOR AMA00001-UP (MACHINE) POWERED BY C32 Engine (SEBP5803 - 92) - Sistemas y Componentes PDFJulio Edgar QuiritaNoch keine Bewertungen
- Manual de Funcionamiento y Mantenimiento de Brazo Robotico YazkawaDokument23 SeitenManual de Funcionamiento y Mantenimiento de Brazo Robotico YazkawaDaniiGamer12Noch keine Bewertungen
- Robot MitsubishiDokument21 SeitenRobot MitsubishiLuis GonzálezNoch keine Bewertungen
- Espacios de Trabajo y Periféricos Del Robot Integrado A La Celda de Manufactura.Dokument24 SeitenEspacios de Trabajo y Periféricos Del Robot Integrado A La Celda de Manufactura.Edgar Sanchez GarciaNoch keine Bewertungen
- Manipulación Robot Mitsubishi RV-2F Con El Teach Pendant (R56TB)Dokument19 SeitenManipulación Robot Mitsubishi RV-2F Con El Teach Pendant (R56TB)Vera SheerlayNoch keine Bewertungen
- Practica Unidad 4Dokument44 SeitenPractica Unidad 4Edy HeadbangerNoch keine Bewertungen
- Sistemas Flexibles ESIME AZACAPOTZALCODokument3 SeitenSistemas Flexibles ESIME AZACAPOTZALCOJule LopezNoch keine Bewertungen
- Curso Fanuc I M07 Programación 2010Dokument174 SeitenCurso Fanuc I M07 Programación 2010BlasX290% (10)
- Fanuc LR MateDokument9 SeitenFanuc LR MateMoy CamarilloNoch keine Bewertungen
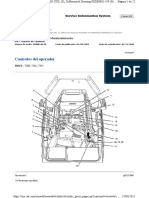
- Controles - Cabina - D6TDokument22 SeitenControles - Cabina - D6TMiguel Castro67% (3)
- Manual de Usuario Robot KukaDokument20 SeitenManual de Usuario Robot KukaPablys Zúñiga100% (1)
- Guia Rapida FANUCVAG PDFDokument13 SeitenGuia Rapida FANUCVAG PDFkuajarlosNoch keine Bewertungen
- Conocimiento CNC ActualizadoDokument14 SeitenConocimiento CNC ActualizadoWigan29Noch keine Bewertungen
- CNC LeadwellDokument13 SeitenCNC LeadwellJuan LeonardoNoch keine Bewertungen
- Manual Operador HNC Mill XK7132Dokument60 SeitenManual Operador HNC Mill XK7132Fabio Andrés CorreaNoch keine Bewertungen
- Menh ESP XBT-R411Dokument11 SeitenMenh ESP XBT-R411Jose Luis Vazquez ValenciaNoch keine Bewertungen
- Trabajo Manual Fresadora Haas Pedro Manuel Martinez Do ReisDokument15 SeitenTrabajo Manual Fresadora Haas Pedro Manuel Martinez Do ReisPedro Martínez Do ReisNoch keine Bewertungen
- Comprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109Von EverandComprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109Noch keine Bewertungen
- Análisis y diseño de piezas con Catia V5Von EverandAnálisis y diseño de piezas con Catia V5Bewertung: 5 von 5 Sternen5/5 (1)
- Preparación y calibración del grupo de presión en máquinas de impresión offset. ARGI0109Von EverandPreparación y calibración del grupo de presión en máquinas de impresión offset. ARGI0109Noch keine Bewertungen
- Reparación de instalaciones automatizadas. ELEE0109Von EverandReparación de instalaciones automatizadas. ELEE0109Noch keine Bewertungen
- Compilador C CCS y Simulador Proteus para Microcontroladores PICVon EverandCompilador C CCS y Simulador Proteus para Microcontroladores PICBewertung: 2.5 von 5 Sternen2.5/5 (5)
- Programación con lenguajes de guión en páginas web. IFCD0110Von EverandProgramación con lenguajes de guión en páginas web. IFCD0110Noch keine Bewertungen
- Módulo de cinemática DMU de Catia V5Von EverandMódulo de cinemática DMU de Catia V5Bewertung: 5 von 5 Sternen5/5 (1)
- Celdas Aisladas en Gas Tipo ZX2 PDFDokument23 SeitenCeldas Aisladas en Gas Tipo ZX2 PDFrimce77Noch keine Bewertungen
- Lubricación CónicasDokument75 SeitenLubricación CónicasHerbert Enrique Pomaccosi Benavente100% (3)
- Descripción Celdas Aisladas en Gas Tipo ZX2 PDFDokument27 SeitenDescripción Celdas Aisladas en Gas Tipo ZX2 PDFrimce77Noch keine Bewertungen
- Recomendaciones de Operación PDFDokument38 SeitenRecomendaciones de Operación PDFrimce77100% (1)
- Mantenimiento SymonsDokument97 SeitenMantenimiento SymonsSebastian Oviedo100% (1)
- Neumática Industrial PDFDokument38 SeitenNeumática Industrial PDFrimce77100% (1)
- Todo Sobre CorazasDokument53 SeitenTodo Sobre CorazasHerbert Enrique Pomaccosi Benavente100% (5)
- Circuito Hidráulico Symons PDFDokument67 SeitenCircuito Hidráulico Symons PDFrimce7773% (11)
- Lectura 2 - Desarrollar Negocios Innovadores Dentro de Organicaciones Establecidas PDFDokument10 SeitenLectura 2 - Desarrollar Negocios Innovadores Dentro de Organicaciones Establecidas PDFgustavo3163517Noch keine Bewertungen
- Valvulas Neumaticas PDFDokument25 SeitenValvulas Neumaticas PDFrimce77100% (2)
- Lab02 Animation Esp PDFDokument8 SeitenLab02 Animation Esp PDFrimce77Noch keine Bewertungen
- Lab01 WindGraph Esp PDFDokument11 SeitenLab01 WindGraph Esp PDFrimce77Noch keine Bewertungen
- Electroneumática Industrial PDFDokument17 SeitenElectroneumática Industrial PDFrimce77Noch keine Bewertungen
- B2314es HPL Ed2 PDFDokument6 SeitenB2314es HPL Ed2 PDFrimce77Noch keine Bewertungen
- Lab03 Quickscripts Esp PDFDokument6 SeitenLab03 Quickscripts Esp PDFrimce77Noch keine Bewertungen
- Diplomado - ROBOTICA INDUSTRIAL PDFDokument40 SeitenDiplomado - ROBOTICA INDUSTRIAL PDFrimce77Noch keine Bewertungen
- Neumatica TransparenciaDokument52 SeitenNeumatica TransparenciaLuis José RodríguezNoch keine Bewertungen
- Oración para El Tiempo de NavidadDokument5 SeitenOración para El Tiempo de NavidadJavier Balán, fscNoch keine Bewertungen
- La Trama Del Camaleon Novela Adan Vivas La Edición PDFDokument354 SeitenLa Trama Del Camaleon Novela Adan Vivas La Edición PDFadanvivasgNoch keine Bewertungen
- 54221-Texto Del Artículo-103985-4-10-20161213Dokument4 Seiten54221-Texto Del Artículo-103985-4-10-20161213Lisett LoaizaNoch keine Bewertungen
- (Lab7) Circuitos Trifasicos BydDokument37 Seiten(Lab7) Circuitos Trifasicos BydGarcia EduNoch keine Bewertungen
- No2 2016Dokument1 SeiteNo2 2016Sebastian Ruiz Peralta0% (1)
- 4.acceso Vascular y Su Cuidado Posterior.Dokument73 Seiten4.acceso Vascular y Su Cuidado Posterior.Murillo Pérez JohanNoch keine Bewertungen
- Nuevo Preparador de Jardin 3 PeriodoDokument28 SeitenNuevo Preparador de Jardin 3 Periodoluz marina jimenez martinezNoch keine Bewertungen
- Nina Jose Ramon FernandezDokument37 SeitenNina Jose Ramon FernandezBárbara AmorimNoch keine Bewertungen
- Manual Configuracion ZXDSL 831 IIDokument7 SeitenManual Configuracion ZXDSL 831 IIohrzamudio100% (1)
- Teoría General de Los SistemasDokument3 SeitenTeoría General de Los SistemasIgnacio ChinaskiNoch keine Bewertungen
- A Examen Final Mét. Estadisticos T-BDokument2 SeitenA Examen Final Mét. Estadisticos T-BELIANA GABRIELA ALVAREZ ZUÑIGANoch keine Bewertungen
- Tabla de Aceros ASTMDokument21 SeitenTabla de Aceros ASTMyosselin50% (2)
- El EspectógrafoDokument4 SeitenEl EspectógrafoSylvia Camblor GrandosoNoch keine Bewertungen
- Plan Departamental SucreDokument87 SeitenPlan Departamental SucreJulio C Daza TorresNoch keine Bewertungen
- Celebremos La Pascua Poniendo en Práctica Nuestras Habilidades SocialesDokument10 SeitenCelebremos La Pascua Poniendo en Práctica Nuestras Habilidades SocialesLuis Ángel Sauceda CarranzaNoch keine Bewertungen
- Mapa Conceptual-Arte Imagen y Saber AncestralDokument3 SeitenMapa Conceptual-Arte Imagen y Saber AncestralDaniela Blanco SerpaNoch keine Bewertungen
- Guía Usuario Hec GeoHMSDokument41 SeitenGuía Usuario Hec GeoHMSAnonimo Que te ImportaNoch keine Bewertungen
- Piratas - Bucaneros - Filibusteros - Corsarios en América-OkDokument325 SeitenPiratas - Bucaneros - Filibusteros - Corsarios en América-OkFrancisco Javier ParedesNoch keine Bewertungen
- ValoracionesDokument220 SeitenValoracionesKelly Espinel ZuñigaNoch keine Bewertungen
- Pedunculos CerebelososDokument17 SeitenPedunculos CerebelososAarom Rodas CamposNoch keine Bewertungen
- Los Mercados de CarbonoDokument7 SeitenLos Mercados de CarbonoIng.Carlos Martinez Conciencia AmbientalNoch keine Bewertungen
- Separador BañaderoDokument13 SeitenSeparador BañaderoFredy PYNoch keine Bewertungen
- Higiene Industrial y Riesgo QuimicoDokument14 SeitenHigiene Industrial y Riesgo QuimicoFortich J. DavidNoch keine Bewertungen
- Obstetricia 2 Usamedic 2017 Completo PDFDokument223 SeitenObstetricia 2 Usamedic 2017 Completo PDFREYNALDO RIDAN MARTINEZ REQUENANoch keine Bewertungen
- Beneficios Del Acido HialuronicoDokument4 SeitenBeneficios Del Acido HialuronicobrendaNoch keine Bewertungen
- Investigación Sobre "Electromagnetismo" 1Dokument24 SeitenInvestigación Sobre "Electromagnetismo" 1Enrique Vega MoralesNoch keine Bewertungen
- Motores AbbDokument20 SeitenMotores AbbPancho1407100% (1)
- Ventajas y Desventajas Del FerrocarrilDokument2 SeitenVentajas y Desventajas Del FerrocarrilmaritareasuniversidadNoch keine Bewertungen
- ANEMIA INVETIGACION Corregido PaoDokument30 SeitenANEMIA INVETIGACION Corregido PaomarcosNoch keine Bewertungen
- La Cascada de CoagulaciónDokument10 SeitenLa Cascada de CoagulaciónCinthia Chalaco100% (1)