Das könnte Ihnen auch gefallen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- D61548GC10 sg1Dokument396 SeitenD61548GC10 sg1yogeshsandujaNoch keine Bewertungen
- Iso 4042 PDFDokument25 SeitenIso 4042 PDFAditya Pratap100% (6)
- Iso 4042 PDFDokument25 SeitenIso 4042 PDFAditya Pratap100% (6)
- Fabian Hfo Manual de Servicio PDFDokument86 SeitenFabian Hfo Manual de Servicio PDFVitor FilipeNoch keine Bewertungen
- Exercicios SolidworksDokument16 SeitenExercicios SolidworksJoãoAraújoNoch keine Bewertungen
- Chapter2 Payroll SystemDokument5 SeitenChapter2 Payroll SystemJohn David Bildan84% (25)
- Java Programming Ebook PDFDokument65 SeitenJava Programming Ebook PDFkaka12125Noch keine Bewertungen
- Fanuc M 900ia SeriesDokument4 SeitenFanuc M 900ia SeriesLeonardo AlexNoch keine Bewertungen
- Runner Blocks Slimline, Steel Version: Runner Block SNS R1622Dokument2 SeitenRunner Blocks Slimline, Steel Version: Runner Block SNS R1622Leonardo AlexNoch keine Bewertungen
- R1651Dokument4 SeitenR1651Leonardo AlexNoch keine Bewertungen
- Life of Festo Products BrochureDokument7 SeitenLife of Festo Products BrochureLeonardo AlexNoch keine Bewertungen
- Tunkers VUClampDokument25 SeitenTunkers VUClampLeonardo AlexNoch keine Bewertungen
- Super linear bushings compensate for misalignmentsDokument2 SeitenSuper linear bushings compensate for misalignmentsLeonardo AlexNoch keine Bewertungen
- Y PDFDokument33 SeitenY PDFlucian lunaNoch keine Bewertungen
- YDokument37 SeitenYLeonardo AlexNoch keine Bewertungen
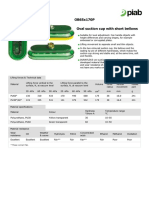
- OB65 X 170 PDokument2 SeitenOB65 X 170 PLeonardo AlexNoch keine Bewertungen
- SolidWorks Education Detailed Drawing ExercisesDokument51 SeitenSolidWorks Education Detailed Drawing ExercisesLeonardo AlexNoch keine Bewertungen
- Round Wire Spec C1225-125-5000-MDokument1 SeiteRound Wire Spec C1225-125-5000-MLeonardo AlexNoch keine Bewertungen
- Datasheet 4075 Socket Head Screws DIN 912 DIN en ISO 4762 Steel or Stainless Steel - enDokument8 SeitenDatasheet 4075 Socket Head Screws DIN 912 DIN en ISO 4762 Steel or Stainless Steel - enLeonardo AlexNoch keine Bewertungen
- CDQ2B125TF-80DCZ 0 1 0Dokument4 SeitenCDQ2B125TF-80DCZ 0 1 0Leonardo AlexNoch keine Bewertungen
- 172 Kg. 379 LBS.: Dowels Ø 10 MM Depth 20 MM by The Customer Dowels Ø 12 MM Depth 25 MM by The CustomerDokument1 Seite172 Kg. 379 LBS.: Dowels Ø 10 MM Depth 20 MM by The Customer Dowels Ø 12 MM Depth 25 MM by The CustomerLeonardo AlexNoch keine Bewertungen
- Positioning Bushings Guide HolesDokument3 SeitenPositioning Bushings Guide HolesLeonardo AlexNoch keine Bewertungen
- Effect of NR On Welds PDFDokument5 SeitenEffect of NR On Welds PDFdev-nullNoch keine Bewertungen
- Catalogo ENSAT ING 2 DefinitivoDokument11 SeitenCatalogo ENSAT ING 2 DefinitivoCan Kutay TuçNoch keine Bewertungen
- Series: SpecificationsDokument1 SeiteSeries: SpecificationsLeonardo AlexNoch keine Bewertungen
- Y PDFDokument33 SeitenY PDFlucian lunaNoch keine Bewertungen
- Inafag Vsu200644 D9tll4zcnof1vws8ev95yejcrDokument1 SeiteInafag Vsu200644 D9tll4zcnof1vws8ev95yejcrLeonardo AlexNoch keine Bewertungen
- Shim SpacerDokument24 SeitenShim Spacerrasalkeshav4563Noch keine Bewertungen
- Crossed Roller Bearings: For High Precision ApplicationsDokument67 SeitenCrossed Roller Bearings: For High Precision ApplicationsLeonardo AlexNoch keine Bewertungen
- Tunkers VUClampDokument25 SeitenTunkers VUClampLeonardo AlexNoch keine Bewertungen
- Series: ISO/VDMA CylinderDokument50 SeitenSeries: ISO/VDMA CylinderLeonardo AlexNoch keine Bewertungen
- 0127236EN Rev02 en Brochure Automation WebbDokument16 Seiten0127236EN Rev02 en Brochure Automation Webbtomislav_horvat_fsb100% (1)
- Super linear bushings compensate for misalignmentsDokument2 SeitenSuper linear bushings compensate for misalignmentsLeonardo AlexNoch keine Bewertungen
- C1225-125-5000-M: Round WireDokument1 SeiteC1225-125-5000-M: Round WireLeonardo AlexNoch keine Bewertungen
- Beagle Board XM Reference ManualDokument164 SeitenBeagle Board XM Reference Manualmhenryk1Noch keine Bewertungen
- MB Connection NUVOTONDokument1 SeiteMB Connection NUVOTONDarcio TolottiNoch keine Bewertungen
- RFMD.: CATV Hybrid Amplifier Modules: Past, Present, FutureDokument21 SeitenRFMD.: CATV Hybrid Amplifier Modules: Past, Present, FutureSanthosh MechNoch keine Bewertungen
- Urddo Commands Manual (UBy-17003787)Dokument198 SeitenUrddo Commands Manual (UBy-17003787)kingtakNoch keine Bewertungen
- Circuit Design With VHDL: Tutorial Quartus 14 and The "Danjel" BoardDokument22 SeitenCircuit Design With VHDL: Tutorial Quartus 14 and The "Danjel" BoardawsdNoch keine Bewertungen
- Wireless Comms Course OverviewDokument14 SeitenWireless Comms Course OverviewNebil AregaNoch keine Bewertungen
- System Verilog Quick View 4pagesDokument9 SeitenSystem Verilog Quick View 4pagesMani KumarNoch keine Bewertungen
- DSQFM TRX 2Dokument6 SeitenDSQFM TRX 2Alex HillNoch keine Bewertungen
- Ch-1-Introduction To ComputersDokument15 SeitenCh-1-Introduction To Computersanand_gudnavarNoch keine Bewertungen
- OpenConfig model structure draftDokument8 SeitenOpenConfig model structure draftsafyh2005Noch keine Bewertungen
- Lab 6 - StudentDokument24 SeitenLab 6 - StudentsalwaNoch keine Bewertungen
- Front PageDokument9 SeitenFront PageGokulakrishnan GkNoch keine Bewertungen
- Base Platform ABI For The ARM Architecture: 1.4, Your Licence To Use This Specification (ARM Contract ReferenceDokument44 SeitenBase Platform ABI For The ARM Architecture: 1.4, Your Licence To Use This Specification (ARM Contract ReferencenevdullNoch keine Bewertungen
- Scheduler Redux IEEEXtreme 16.0-11Dokument1 SeiteScheduler Redux IEEEXtreme 16.0-11Erick Yair Aguilar MartinezNoch keine Bewertungen
- Hyper-V Virtual Machine Connection - Microsoft DocsDokument5 SeitenHyper-V Virtual Machine Connection - Microsoft DocsDeepak KumarNoch keine Bewertungen
- PassLeader 300-375 Exam Dumps (21-30)Dokument4 SeitenPassLeader 300-375 Exam Dumps (21-30)Janek PodwalaNoch keine Bewertungen
- Lab Exercise 3 - SniffingDokument4 SeitenLab Exercise 3 - SniffingRyan RobinsonNoch keine Bewertungen
- SDN AND NAC RFPDokument18 SeitenSDN AND NAC RFPForever ForeverNoch keine Bewertungen
- CV-RPA Solution Architect-AADokument5 SeitenCV-RPA Solution Architect-AAAditya ThakurNoch keine Bewertungen
- Microsoft Antivirus APIDokument5 SeitenMicrosoft Antivirus APIhuachanoNoch keine Bewertungen
- Intel Centrino (Case Study) by SBSDokument34 SeitenIntel Centrino (Case Study) by SBShassankasNoch keine Bewertungen
- DCCN ProjectDokument5 SeitenDCCN ProjectBasit AliNoch keine Bewertungen
- Usb Cam LogDokument3 SeitenUsb Cam LogTribhubaneshwar DasNoch keine Bewertungen
- Fog Computing OverviewDokument16 SeitenFog Computing OverviewPooja P50% (2)
- Annexure - I Anna University,: Chennai - 25 Distance EducationDokument1 SeiteAnnexure - I Anna University,: Chennai - 25 Distance EducationTamizha TamizhaNoch keine Bewertungen
- Mks Ct150 Delta A. Hmi Factory Settings: Appendix B Communication - Scredit Software User ManualDokument2 SeitenMks Ct150 Delta A. Hmi Factory Settings: Appendix B Communication - Scredit Software User ManualryoNoch keine Bewertungen