Das könnte Ihnen auch gefallen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Example Problem: STEP 1: Calculate Power RequirementDokument2 SeitenExample Problem: STEP 1: Calculate Power RequirementRas PqrNoch keine Bewertungen
- BUS Voltage Angle 1 1 0 2 1 1.8 3 0.9986 - 0.82 4 1.0011 0.65 5 0.9731 - 3.78 3 0.9825 - 2.66Dokument1 SeiteBUS Voltage Angle 1 1 0 2 1 1.8 3 0.9986 - 0.82 4 1.0011 0.65 5 0.9731 - 3.78 3 0.9825 - 2.66Ras PqrNoch keine Bewertungen
- HeshtrttDokument5 SeitenHeshtrttRas PqrNoch keine Bewertungen
- Negfgsoft EdfgrksheetDokument2 SeitenNegfgsoft EdfgrksheetRas PqrNoch keine Bewertungen
- AmigglaDokument2 SeitenAmigglaRas PqrNoch keine Bewertungen
- Energy Efficient Microgrid Management Using Model Predictive ControlDokument6 SeitenEnergy Efficient Microgrid Management Using Model Predictive ControlRas PqrNoch keine Bewertungen
- Iram 13 BDokument16 SeitenIram 13 BRas PqrNoch keine Bewertungen
- Annual Charity Event "We Are With You": Total Projected Income 175,000 LKRDokument1 SeiteAnnual Charity Event "We Are With You": Total Projected Income 175,000 LKRRas PqrNoch keine Bewertungen
- ApplicatiuideDokument13 SeitenApplicatiuideRas PqrNoch keine Bewertungen
- TVM Practice Problems SolutionsDokument7 SeitenTVM Practice Problems SolutionsAnne Bona100% (1)
- AIESEC Colombo South in University of Moratuwa Annual Report 2 0 1 1 / 2 0 1 2Dokument34 SeitenAIESEC Colombo South in University of Moratuwa Annual Report 2 0 1 1 / 2 0 1 2Ras PqrNoch keine Bewertungen
- EportDokument2 SeitenEportRas PqrNoch keine Bewertungen
- Emotional States and HealthDokument40 SeitenEmotional States and HealthKrishna SundarrajNoch keine Bewertungen
- SanumeDokument3 SeitenSanumeRas PqrNoch keine Bewertungen
- Model Paper 2013/2014Dokument2 SeitenModel Paper 2013/2014Ras PqrNoch keine Bewertungen
- FDF FFFDokument1 SeiteFDF FFFRas PqrNoch keine Bewertungen
- Solar Inverter Manual v1.0Dokument71 SeitenSolar Inverter Manual v1.0Ras PqrNoch keine Bewertungen
- TempDokument1 SeiteTempRas PqrNoch keine Bewertungen
- 360 Deg AppraisalDokument69 Seiten360 Deg AppraisalSri LakshmiNoch keine Bewertungen
- P 16Dokument1 SeiteP 16Ras PqrNoch keine Bewertungen
- College Day Personal Statement Guide RevisedDokument4 SeitenCollege Day Personal Statement Guide RevisedRas PqrNoch keine Bewertungen
- SPD T. FinalDokument7 SeitenSPD T. FinalRas PqrNoch keine Bewertungen
- KedysDokument1 SeiteKedysRas PqrNoch keine Bewertungen
- FFDGFGFDokument1 SeiteFFDGFGFRas PqrNoch keine Bewertungen
- GFGDokument1 SeiteGFGRas PqrNoch keine Bewertungen
- Power Semiconductor Device NptelDokument14 SeitenPower Semiconductor Device NptelMohammad Aminul IslamNoch keine Bewertungen
- KeyDokument2 SeitenKeyRas PqrNoch keine Bewertungen
- ReadmeDokument1 SeiteReadmeShraddha SrivastavaNoch keine Bewertungen
- InsTrucTions & KEYDokument2 SeitenInsTrucTions & KEYChristian ParadoNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Elektor (Nonlinear - Ir) 1979-07 - 08 - TextDokument123 SeitenElektor (Nonlinear - Ir) 1979-07 - 08 - TextQuincheNoch keine Bewertungen
- 10EC64 - AP - QB - Final - TopicsDokument13 Seiten10EC64 - AP - QB - Final - TopicsharshithaNoch keine Bewertungen
- IXOSIL MSA145-XLMG One-Piece Slip-On Joint: Technical DataDokument1 SeiteIXOSIL MSA145-XLMG One-Piece Slip-On Joint: Technical DataMohammad NasarNoch keine Bewertungen
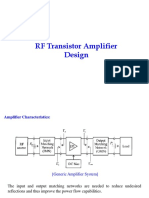
- Lecture 2 RF Amplifier DesignDokument50 SeitenLecture 2 RF Amplifier DesignVenkata Pradeep SangepuNoch keine Bewertungen
- Hef 4069Dokument7 SeitenHef 4069makkasiNoch keine Bewertungen
- DS-7200HUHI-K1 SERIES Turbo HD DVR: Key FeatureDokument4 SeitenDS-7200HUHI-K1 SERIES Turbo HD DVR: Key FeatureRadu GălățanNoch keine Bewertungen
- Two Port NetworkDokument7 SeitenTwo Port NetworkAzim KhanNoch keine Bewertungen
- Best Energy Management: For HVACDokument10 SeitenBest Energy Management: For HVACMarc Emil CasilaoNoch keine Bewertungen
- DMTE ABB 2csm445001d0202Dokument12 SeitenDMTE ABB 2csm445001d0202Marco VolpeNoch keine Bewertungen
- Week 16: Electronics System Engineering Flat-Sat For IgosatDokument10 SeitenWeek 16: Electronics System Engineering Flat-Sat For IgosatJuan VALVERDENoch keine Bewertungen
- Axiomatic Manual UMAX0318x0Dokument52 SeitenAxiomatic Manual UMAX0318x0Miguel 1856Noch keine Bewertungen
- 02 PDFDokument39 Seiten02 PDFbond29Noch keine Bewertungen
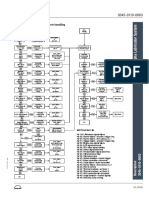
- 63 Sequence Diagram For Alarm HandlingDokument1 Seite63 Sequence Diagram For Alarm HandlingNick SkiadasNoch keine Bewertungen
- Amateur Band PlanDokument19 SeitenAmateur Band PlandeanNoch keine Bewertungen
- Powerflex: Operating ManualDokument16 SeitenPowerflex: Operating Manualjap0258Noch keine Bewertungen
- Samsung UE48JS8500 EU Modell Schnellstartanleitung 5fd81fDokument36 SeitenSamsung UE48JS8500 EU Modell Schnellstartanleitung 5fd81flovrata4550Noch keine Bewertungen
- Good OneDokument94 SeitenGood OneVishal PattanshettiNoch keine Bewertungen
- Technical Manual: AtlantisDokument56 SeitenTechnical Manual: AtlantisJohnNoch keine Bewertungen
- WPS 2Dokument41 SeitenWPS 2Armin PatelNoch keine Bewertungen
- Ee321 ObjectivesDokument3 SeitenEe321 ObjectivesJomar DadorNoch keine Bewertungen
- Computer Organization - Study MaterialDokument5 SeitenComputer Organization - Study MaterialDinesh VelNoch keine Bewertungen
- Lesson: Electromagnetic WavesDokument4 SeitenLesson: Electromagnetic WavesHuey TingNoch keine Bewertungen
- Academic Course DescriptionDokument8 SeitenAcademic Course DescriptionRajalearn1 Ramlearn1Noch keine Bewertungen
- CO2 Sensor1Dokument46 SeitenCO2 Sensor1Masood AkhtarNoch keine Bewertungen
- 3 Measurement of Power and Power Factor in 3 Phase CircuitDokument6 Seiten3 Measurement of Power and Power Factor in 3 Phase Circuitsatishsongs1Noch keine Bewertungen
- 13.a1701 OmDokument12 Seiten13.a1701 Ommohd arif fahmi mohamad salehNoch keine Bewertungen
- Agriculture Based Saved Wild AnimalsDokument19 SeitenAgriculture Based Saved Wild Animalsvenky potlaNoch keine Bewertungen
- Conexiones RobotDokument250 SeitenConexiones RobotDiego YepesNoch keine Bewertungen
- DBV 200Dokument36 SeitenDBV 200Cristian Villani SulezNoch keine Bewertungen
- MOSFET TransistorDokument17 SeitenMOSFET TransistorOmer BallakNoch keine Bewertungen