Das könnte Ihnen auch gefallen
- Matlab Course BrochureDokument8 SeitenMatlab Course Brochuresakshi_singh_25Noch keine Bewertungen
- Simplex MethodDokument16 SeitenSimplex MethodShantanu Dutta100% (1)
- Theory of Automatic Control: Adiwes International SeriesVon EverandTheory of Automatic Control: Adiwes International SeriesNoch keine Bewertungen
- Title Defense Ppt. PLTDokument17 SeitenTitle Defense Ppt. PLTPhyu Lay ThweNoch keine Bewertungen
- Instrumentation and ControlDokument2 SeitenInstrumentation and ControlKrista JacksonNoch keine Bewertungen
- Electrical Circuits with Variable Parameters: Including Pulsed-Control SystemsVon EverandElectrical Circuits with Variable Parameters: Including Pulsed-Control SystemsNoch keine Bewertungen
- Control SystemsDokument61 SeitenControl SystemsBaji BabuNoch keine Bewertungen
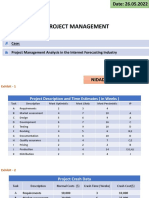
- Project Management Analysis in The Internet Forecasting IndustryDokument14 SeitenProject Management Analysis in The Internet Forecasting IndustryNiranjan NidadavoluNoch keine Bewertungen
- CQF CurriculumDokument21 SeitenCQF Curriculumernesto123_53Noch keine Bewertungen
- Baisc Concepts in SAP IBP SupplyDokument7 SeitenBaisc Concepts in SAP IBP SupplyVishnu Kumar S50% (2)
- Principles of Managerial Finance Chapter 10Dokument13 SeitenPrinciples of Managerial Finance Chapter 10vireu100% (3)
- Gujarat Technological University: Aeronautical Engineering Subject CodeDokument4 SeitenGujarat Technological University: Aeronautical Engineering Subject CodeHarnil VaghasiyaNoch keine Bewertungen
- LCS LecturesDokument220 SeitenLCS LecturesfarazhumayunNoch keine Bewertungen
- Automatic Control (ME1401)Dokument2 SeitenAutomatic Control (ME1401)Mehroos AliNoch keine Bewertungen
- Advanced Control Systems SyllabusDokument2 SeitenAdvanced Control Systems SyllabusMulu GirmayNoch keine Bewertungen
- Gujarat Technological University: W.E.F. AY 2018-19Dokument3 SeitenGujarat Technological University: W.E.F. AY 2018-19Alok MauryaNoch keine Bewertungen
- Modified Syllabus of Control SystemDokument2 SeitenModified Syllabus of Control SystemDigambar PatilNoch keine Bewertungen
- Control SystemsDokument96 SeitenControl SystemsDr. Gollapalli NareshNoch keine Bewertungen
- 06me71 - Control Engineering: Dept - of Mechanical Engineering MvjceDokument68 Seiten06me71 - Control Engineering: Dept - of Mechanical Engineering MvjceDr-Bharath Vedashantha MurthyNoch keine Bewertungen
- 4el46: Digital Control Design CREDITS - 4 (LTP:3,0,1)Dokument2 Seiten4el46: Digital Control Design CREDITS - 4 (LTP:3,0,1)Vatsal MataliyaNoch keine Bewertungen
- 2151705 (2)Dokument3 Seiten2151705 (2)Maulik MulaniNoch keine Bewertungen
- Control Systems Notes SJBIT PDFDokument124 SeitenControl Systems Notes SJBIT PDFSanath SanuNoch keine Bewertungen
- Control Technology: Department of Engineering TechnologyDokument55 SeitenControl Technology: Department of Engineering TechnologyTaha AmerNoch keine Bewertungen
- Jawaharlal Nehru Technological University II Year B.Tech. ECE. Il-Sem T P 0 C Control SystemsDokument1 SeiteJawaharlal Nehru Technological University II Year B.Tech. ECE. Il-Sem T P 0 C Control SystemsappuamreddyNoch keine Bewertungen
- Telemetry & Wireless Sensor NetworkDokument10 SeitenTelemetry & Wireless Sensor NetworkSwapan DasNoch keine Bewertungen
- Gujarat Technological University: Control Engineering Subject B.E. 5 SemesterDokument3 SeitenGujarat Technological University: Control Engineering Subject B.E. 5 Semesterishan shahNoch keine Bewertungen
- Ec206: Control System Engineering CREDITS 6 (L 4, T 0, P 2)Dokument3 SeitenEc206: Control System Engineering CREDITS 6 (L 4, T 0, P 2)Naman ShuklaNoch keine Bewertungen
- Ec206: Control System Engineering CREDITS 6 (L 4, T 0, P 2)Dokument3 SeitenEc206: Control System Engineering CREDITS 6 (L 4, T 0, P 2)Naman ShuklaNoch keine Bewertungen
- Syllabus 6 EeeDokument11 SeitenSyllabus 6 EeeSUMIT RAJNoch keine Bewertungen
- Digital Control SystemsDokument1 SeiteDigital Control SystemsAnonymous HyOfbJ6Noch keine Bewertungen
- Be Electrical Engg 2008 SyllabusDokument40 SeitenBe Electrical Engg 2008 SyllabusGaurav sNoch keine Bewertungen
- ME 474 Syllabus 20211Dokument6 SeitenME 474 Syllabus 20211aziz DeganiNoch keine Bewertungen
- Rajasthan Technical University, Kota: Design SpecificationsDokument2 SeitenRajasthan Technical University, Kota: Design SpecificationsIQAC ARYANoch keine Bewertungen
- Ec 8391 Cs Auqp Merged 8.5.19Dokument31 SeitenEc 8391 Cs Auqp Merged 8.5.19sivaNoch keine Bewertungen
- Gujarat Technological University: Mechanical Engineering (19) SUBJECT CODE: 2151908Dokument3 SeitenGujarat Technological University: Mechanical Engineering (19) SUBJECT CODE: 2151908Mulu GirmayNoch keine Bewertungen
- Syllabus (EE 303) PDFDokument2 SeitenSyllabus (EE 303) PDFAjayNoch keine Bewertungen
- Control System LabDokument6 SeitenControl System LabManraj KaurNoch keine Bewertungen
- IC1252Dokument0 SeitenIC1252Eugin RajNoch keine Bewertungen
- Control System Ece QB EeeeeeeDokument73 SeitenControl System Ece QB EeeeeeeARNI JAYACHANDRANoch keine Bewertungen
- CSE SyllDokument2 SeitenCSE SyllAandy KhasdarNoch keine Bewertungen
- Switch Gear and ProtectionDokument15 SeitenSwitch Gear and ProtectionLaxmiKrishnaNoch keine Bewertungen
- Karmaveer Bhaurao Patil Polytechnic, Satara: Control ActionsDokument104 SeitenKarmaveer Bhaurao Patil Polytechnic, Satara: Control Actionsmohammd imran azizNoch keine Bewertungen
- PDC HandoutDokument3 SeitenPDC Handoutf20212587Noch keine Bewertungen
- Silver Oak University: College of TechnologyDokument4 SeitenSilver Oak University: College of TechnologyEr Mohammad ImranNoch keine Bewertungen
- Control Control Systems Systems 10ES43 10ES43Dokument7 SeitenControl Control Systems Systems 10ES43 10ES43Arshiya Kousar MNoch keine Bewertungen
- ME1401 Automatic Control SyllabusDokument1 SeiteME1401 Automatic Control Syllabusvaibhav katharNoch keine Bewertungen
- Control Systems and Simulation Lab: Srinivasa Institute of Technology & ScienceDokument38 SeitenControl Systems and Simulation Lab: Srinivasa Institute of Technology & SciencemeenaNoch keine Bewertungen
- Syllabus Control Systems ECE R13Dokument2 SeitenSyllabus Control Systems ECE R13tansnvarmaNoch keine Bewertungen
- Course Code: EE303 Linear Control Systems 2-1-0-3 2016 Prerequisite: NilDokument2 SeitenCourse Code: EE303 Linear Control Systems 2-1-0-3 2016 Prerequisite: NilSUNOBHAINoch keine Bewertungen
- Ee404 Industrial Instrumentation and AutomationDokument3 SeitenEe404 Industrial Instrumentation and AutomationArya RahulNoch keine Bewertungen
- CS Basic1Dokument12 SeitenCS Basic1mansoorNoch keine Bewertungen
- Dept. of EEE, Prime UniversityDokument16 SeitenDept. of EEE, Prime UniversityMD Rakib SHordorNoch keine Bewertungen
- CS R-16 SyllabusDokument3 SeitenCS R-16 SyllabusSai tejaswiNoch keine Bewertungen
- CSEDokument2 SeitenCSESumit KhuranaNoch keine Bewertungen
- Control Theory SYLLABUSDokument3 SeitenControl Theory SYLLABUSjustlearn369963Noch keine Bewertungen
- NEW Details Video LinksDokument6 SeitenNEW Details Video LinksSunil JainNoch keine Bewertungen
- TextbooksDokument2 SeitenTextbooksSurya RNoch keine Bewertungen
- Intro To Control TheoryDokument15 SeitenIntro To Control TheoryDavid AmarteyNoch keine Bewertungen
- Linear Feedback Controls The Essentials 2Nd Edition Mark A Haidekker Download PDF ChapterDokument51 SeitenLinear Feedback Controls The Essentials 2Nd Edition Mark A Haidekker Download PDF Chapterjames.young734100% (14)
- Lab Sheet MEC522 PBL (ArduinoDC - MotorEncoder - Close Loop)Dokument3 SeitenLab Sheet MEC522 PBL (ArduinoDC - MotorEncoder - Close Loop)haikal zubirNoch keine Bewertungen
- Cs Lab Manual 31.05.14Dokument195 SeitenCs Lab Manual 31.05.14sravanNoch keine Bewertungen
- Third Year 5 Semester Syllabus: (Applicable From The Academic Session 2018-2019)Dokument23 SeitenThird Year 5 Semester Syllabus: (Applicable From The Academic Session 2018-2019)Tignangshu ChatterjeeNoch keine Bewertungen
- IC8451-Notes - by WWW - Easyengineering.net 8Dokument132 SeitenIC8451-Notes - by WWW - Easyengineering.net 8munusamyNoch keine Bewertungen
- Gujarat Technological University: Page 1 of 3Dokument3 SeitenGujarat Technological University: Page 1 of 3AADITYA SHAHNoch keine Bewertungen
- Syllabus GTU PDFDokument3 SeitenSyllabus GTU PDFkalpesh_chandakNoch keine Bewertungen
- Professional Practices VIDokument3 SeitenProfessional Practices VIVictoria FrancoNoch keine Bewertungen
- Mobile Communication (9173)Dokument5 SeitenMobile Communication (9173)Victoria FrancoNoch keine Bewertungen
- Management (9133)Dokument5 SeitenManagement (9133)Victoria FrancoNoch keine Bewertungen
- Industrial ProjectDokument3 SeitenIndustrial ProjectVictoria FrancoNoch keine Bewertungen
- Embedded System (9168)Dokument5 SeitenEmbedded System (9168)Victoria FrancoNoch keine Bewertungen
- Advance Communication Systems (9172)Dokument6 SeitenAdvance Communication Systems (9172)Victoria Franco0% (1)
- Curve FittingDokument48 SeitenCurve FittingNi Putu Indira MelilaNoch keine Bewertungen
- AI MCQS - Set 1Dokument9 SeitenAI MCQS - Set 1ahmad chheenaNoch keine Bewertungen
- Word2Vec Tutorial - The Skip-Gram Model Chris McCormick PDFDokument39 SeitenWord2Vec Tutorial - The Skip-Gram Model Chris McCormick PDFVandCasaNoch keine Bewertungen
- Assignment 1Dokument2 SeitenAssignment 1Adil AliNoch keine Bewertungen
- Anomaly Detection On Gas TurbineDokument48 SeitenAnomaly Detection On Gas TurbineAhmedNoch keine Bewertungen
- VL2019201000936 Da PDFDokument2 SeitenVL2019201000936 Da PDFDipeshNoch keine Bewertungen
- Data Encryption StandardDokument16 SeitenData Encryption StandardMahmudur RahmanNoch keine Bewertungen
- Lect 1 - Intro To Automatic Control PDFDokument15 SeitenLect 1 - Intro To Automatic Control PDFYota KimireNoch keine Bewertungen
- QDokument29 SeitenQS Kiong TingNoch keine Bewertungen
- Eeezg573 May03 An PDFDokument2 SeitenEeezg573 May03 An PDFSaurabh Jaiswal JassiNoch keine Bewertungen
- Tsa HW03Dokument1 SeiteTsa HW03林妍汝Noch keine Bewertungen
- Dynamic Learning Program (General Mathematics) : Arellano UniversityDokument4 SeitenDynamic Learning Program (General Mathematics) : Arellano UniversityariannaNoch keine Bewertungen
- Nets 212: Scalable and Cloud Computing: Graph Algorithms in Mapreduce October 15, 2013Dokument61 SeitenNets 212: Scalable and Cloud Computing: Graph Algorithms in Mapreduce October 15, 2013Ritesh VermaNoch keine Bewertungen
- The Promise of Differential Privacy: Cynthia Dwork, Microsoft ResearchDokument50 SeitenThe Promise of Differential Privacy: Cynthia Dwork, Microsoft ResearchjkfsdjkfldsfNoch keine Bewertungen
- Fuzzy Relation & Neural NetsDokument38 SeitenFuzzy Relation & Neural NetsvpkvikasNoch keine Bewertungen
- Immediate Settlement Analysis Using Finite Element Analysis Models of Fb-MultipierDokument22 SeitenImmediate Settlement Analysis Using Finite Element Analysis Models of Fb-MultipierRaaf RifandiNoch keine Bewertungen
- Date Fruit Dataset For Inspection and Grading1Dokument7 SeitenDate Fruit Dataset For Inspection and Grading1iamrafayrafaqatNoch keine Bewertungen
- IFEM Model PaperDokument4 SeitenIFEM Model PaperMuhammad Huzaifa NajeebNoch keine Bewertungen
- Prediction of Mobile Phone Price Class Using Supervised Machine Learning TechniquesDokument4 SeitenPrediction of Mobile Phone Price Class Using Supervised Machine Learning TechniquesInternational Journal of Innovative Science and Research TechnologyNoch keine Bewertungen
- Parameter Optimization of Single Exponential Smoothing Using Golden Section Method For Groceries ForecastingDokument9 SeitenParameter Optimization of Single Exponential Smoothing Using Golden Section Method For Groceries ForecastingGoval SirviandoNoch keine Bewertungen
- Quadratic X CheatsheetDokument3 SeitenQuadratic X Cheatsheettmskannan1967Noch keine Bewertungen
- Design and Analysis Cylindrical Water TankDokument2 SeitenDesign and Analysis Cylindrical Water TankArni Suwarni100% (1)
- NM - Lec 23 DiffDokument25 SeitenNM - Lec 23 DiffeyassadailehNoch keine Bewertungen