Das könnte Ihnen auch gefallen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- COBOL, JCL, CICS, DB2, IMS & VSAM question bankDokument127 SeitenCOBOL, JCL, CICS, DB2, IMS & VSAM question bankSukanta Jana100% (1)
- Sharepoint Developer Interview QuestionsDokument6 SeitenSharepoint Developer Interview QuestionsSandeep VemulaNoch keine Bewertungen
- Est1 PDFDokument24 SeitenEst1 PDFchakrouneNoch keine Bewertungen
- OOPS Notes by RNReddyDokument223 SeitenOOPS Notes by RNReddyxafan39947Noch keine Bewertungen
- Kochan, Stephen G. & Patrick Wood. 2017. Shell Programming in Unix, Linux and OS XDokument397 SeitenKochan, Stephen G. & Patrick Wood. 2017. Shell Programming in Unix, Linux and OS XAnonymous 20JLxLjB6100% (1)
- DX200 System SetupDokument260 SeitenDX200 System SetupArno Botha100% (1)
- Tl-wr1043nd v1 User GuideDokument124 SeitenTl-wr1043nd v1 User GuideroblasarNoch keine Bewertungen
- T BJT - TIP41C - TIP42C - Power - BJTs (Sonder Pinout)Dokument4 SeitenT BJT - TIP41C - TIP42C - Power - BJTs (Sonder Pinout)Ludwig SchmidtNoch keine Bewertungen
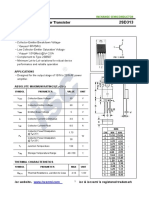
- Transistor NPN 2n222aDokument8 SeitenTransistor NPN 2n222aRoberto Eduardo Tenorio RamosNoch keine Bewertungen
- SOUND CARD - Sblive24 Sound Blaster Live! 24-Bit ExternalDokument2 SeitenSOUND CARD - Sblive24 Sound Blaster Live! 24-Bit ExternalLudwig SchmidtNoch keine Bewertungen
- Sound Card - Emagic A 62 enDokument84 SeitenSound Card - Emagic A 62 enLudwig SchmidtNoch keine Bewertungen
- Sound Card - Sound Blaster X-Fi Sb0679 Rev1.0Dokument5 SeitenSound Card - Sound Blaster X-Fi Sb0679 Rev1.0Ludwig SchmidtNoch keine Bewertungen
- T BJT - Tip41 - Tip42 (Met Pinout)Dokument4 SeitenT BJT - Tip41 - Tip42 (Met Pinout)Ludwig SchmidtNoch keine Bewertungen
- 2n7000 PDFDokument7 Seiten2n7000 PDFNuraniIndahSNoch keine Bewertungen
- T BJT PNP - 2n4403Dokument7 SeitenT BJT PNP - 2n4403Ludwig SchmidtNoch keine Bewertungen
- BF245BDokument4 SeitenBF245BilanigalNoch keine Bewertungen
- T Fet N - Bf245a-B-c - 2 - PhilipsDokument12 SeitenT Fet N - Bf245a-B-c - 2 - PhilipsLudwig SchmidtNoch keine Bewertungen
- Switch Tact Mic B1736 ++ Me249-020Dokument1 SeiteSwitch Tact Mic B1736 ++ Me249-020Ludwig SchmidtNoch keine Bewertungen
- Router Wlan Gbit Tl-wr1043nd - v1 - DatasheetDokument3 SeitenRouter Wlan Gbit Tl-wr1043nd - v1 - DatasheetLudwig SchmidtNoch keine Bewertungen
- Reg - LM2931Dokument18 SeitenReg - LM2931Ludwig SchmidtNoch keine Bewertungen
- OpAmp - MCP6244Dokument38 SeitenOpAmp - MCP6244Ludwig SchmidtNoch keine Bewertungen
- PLUG DC Mantech Connectors ME249-098Dokument1 SeitePLUG DC Mantech Connectors ME249-098Ludwig SchmidtNoch keine Bewertungen
- MC78XX/LM78XX/MC78XXA: 3-Terminal 1A Positive Voltage RegulatorDokument28 SeitenMC78XX/LM78XX/MC78XXA: 3-Terminal 1A Positive Voltage Regulatorapi-19786583Noch keine Bewertungen
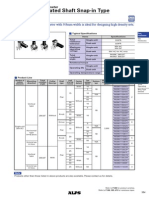
- R POT - Insulated Shaft Potentiometer RK09K+RK09D Series - 0900766b80f4c571Dokument7 SeitenR POT - Insulated Shaft Potentiometer RK09K+RK09D Series - 0900766b80f4c571Ludwig SchmidtNoch keine Bewertungen
- PICkit 3 User Guide 51795ADokument98 SeitenPICkit 3 User Guide 51795AJack Liddle100% (1)
- OpAmp - MCP6241Dokument28 SeitenOpAmp - MCP6241Ludwig SchmidtNoch keine Bewertungen
- LM101ADokument20 SeitenLM101AAna MelendezNoch keine Bewertungen
- Optical Distance Sensor - GP2Y0D810Z0F Gp2y0d810z - eDokument9 SeitenOptical Distance Sensor - GP2Y0D810Z0F Gp2y0d810z - eLudwig SchmidtNoch keine Bewertungen
- OpAmp - LF12741 - NatSemDokument13 SeitenOpAmp - LF12741 - NatSemLudwig SchmidtNoch keine Bewertungen
- OpAmp - LF12741 - NatSemDokument13 SeitenOpAmp - LF12741 - NatSemLudwig SchmidtNoch keine Bewertungen
- LM318HDokument19 SeitenLM318HAlberto MarsicoNoch keine Bewertungen
- OpAmp - LM308AN - MotorolaDokument9 SeitenOpAmp - LM308AN - MotorolaLudwig SchmidtNoch keine Bewertungen
- Amplifiers and ComparatorsDokument11 SeitenAmplifiers and Comparatorshoang_tuanNoch keine Bewertungen
- OpAmp - LM308AN - National Semiconductor - 49173 - DSDokument9 SeitenOpAmp - LM308AN - National Semiconductor - 49173 - DSLudwig SchmidtNoch keine Bewertungen
- LM124/LM224/LM324/LM2902 Low Power Quad Operational AmplifiersDokument21 SeitenLM124/LM224/LM324/LM2902 Low Power Quad Operational Amplifiersapple.scotch.fool3550Noch keine Bewertungen
- LF 353 NDokument15 SeitenLF 353 NivrajkireNoch keine Bewertungen
- Upgrading From Oracle 9i To Oracle Database 11g:: A Real World Customer ExperienceDokument41 SeitenUpgrading From Oracle 9i To Oracle Database 11g:: A Real World Customer ExperienceEmerson Rodrigo OrciNoch keine Bewertungen
- Django Model View Template (MVT) Overview - OnlinetutorialspointDokument6 SeitenDjango Model View Template (MVT) Overview - OnlinetutorialspointBruno NavegaNoch keine Bewertungen
- PhaseSpace Motion CaptureDokument5 SeitenPhaseSpace Motion CaptureKemuel Bryan LuciajaNoch keine Bewertungen
- MA5100 5103 Operation ManualDokument274 SeitenMA5100 5103 Operation ManualCristian MorenoNoch keine Bewertungen
- Mahakal Institute of Technology: Department of Computer Science and EngineeringDokument24 SeitenMahakal Institute of Technology: Department of Computer Science and EngineeringMaanvendra Singh RajputNoch keine Bewertungen
- Bangalore University: Computer Science and EngineeringDokument25 SeitenBangalore University: Computer Science and EngineeringBethel LalrotluangaNoch keine Bewertungen
- Wireless Comms Course OverviewDokument14 SeitenWireless Comms Course OverviewNebil AregaNoch keine Bewertungen
- .Soldier Health and Position Tracking SystemDokument4 Seiten.Soldier Health and Position Tracking SystemVarunNoch keine Bewertungen
- Librify Final PresentationDokument14 SeitenLibrify Final PresentationRihan AbalNoch keine Bewertungen
- FC Csp423 PDF TiDokument1 SeiteFC Csp423 PDF TiEmilyNoch keine Bewertungen
- TCP Client Test Software - Simply Modbus SoftwareDokument4 SeitenTCP Client Test Software - Simply Modbus SoftwareSaber LeffiNoch keine Bewertungen
- Forticlient v5.0.9 Windows Release NotesDokument18 SeitenForticlient v5.0.9 Windows Release NotesMiodrag BanacNoch keine Bewertungen
- ABAP Proxy communication (Server ProxyDokument8 SeitenABAP Proxy communication (Server ProxyvikasreddyNoch keine Bewertungen
- JVC RX-9010VBK Service ManualDokument21 SeitenJVC RX-9010VBK Service ManualklynsdadNoch keine Bewertungen
- 2SD313 60V NPN Power TransistorDokument2 Seiten2SD313 60V NPN Power TransistorSunu HerryNoch keine Bewertungen
- August 2021 Cloud Reseller PricelistDokument1.705 SeitenAugust 2021 Cloud Reseller PricelistjoseNoch keine Bewertungen
- VM 205Dokument40 SeitenVM 205ZalNoch keine Bewertungen
- Digital Persona SDKDokument2 SeitenDigital Persona SDKclarika100% (1)
- Abc It1Dokument159 SeitenAbc It1m ganeshNoch keine Bewertungen
- Configure Juniper SRX Implicit DenyDokument3 SeitenConfigure Juniper SRX Implicit DenyNguyen Hoang AnhNoch keine Bewertungen
- hd5650 HackintoshDokument7 Seitenhd5650 HackintoshAli PadaryamNoch keine Bewertungen
- Faast Lt-200 Eb 1 Channel, Loop Ready: Part-No.: 801711.10 Approval: VdsDokument1 SeiteFaast Lt-200 Eb 1 Channel, Loop Ready: Part-No.: 801711.10 Approval: VdsNicu NicuNoch keine Bewertungen
- Interfacing Ultrasonic Sensor and Buzzer with ArduinoDokument29 SeitenInterfacing Ultrasonic Sensor and Buzzer with ArduinoKaleeswariNoch keine Bewertungen
- Compressor Simetrix 425 Manual UsuárioDokument59 SeitenCompressor Simetrix 425 Manual UsuárioEdson SilvaNoch keine Bewertungen