Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- (HVAC) Controls Variable Air Volume (VAV) Systems, VisSim Tutorial Part 2Dokument10 Seiten(HVAC) Controls Variable Air Volume (VAV) Systems, VisSim Tutorial Part 2Art G. EnziNoch keine Bewertungen
- Astm e 110 2002 PDFDokument2 SeitenAstm e 110 2002 PDFtehOnipisNoch keine Bewertungen
- How To Speak Like A LeaderDokument2 SeitenHow To Speak Like A LeaderArt G. EnziNoch keine Bewertungen
- A1482 F 01Dokument16 SeitenA1482 F 01Art G. EnziNoch keine Bewertungen
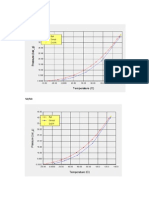
- C3 - C4 P-T PlotsDokument2 SeitenC3 - C4 P-T PlotsArt G. EnziNoch keine Bewertungen
- MPR For LTCS FittingsDokument25 SeitenMPR For LTCS FittingsArt G. EnziNoch keine Bewertungen
- Pressure Drop of Full Bore Vs Reduced Bore Ball ValvesDokument1 SeitePressure Drop of Full Bore Vs Reduced Bore Ball ValvesArt G. EnziNoch keine Bewertungen
- (HVAC) Controls Variable Air Volume (VAV) Systems, VisSim Tutorial Part 2Dokument10 Seiten(HVAC) Controls Variable Air Volume (VAV) Systems, VisSim Tutorial Part 2Art G. EnziNoch keine Bewertungen
- 1210-VSP-001 REV C 516-60 + Monel CLAD PLT - NOT ISSUEDDokument1 Seite1210-VSP-001 REV C 516-60 + Monel CLAD PLT - NOT ISSUEDArt G. Enzi100% (1)
- Contingency PlanDokument1 SeiteContingency PlanArt G. EnziNoch keine Bewertungen
- ReadmeDokument1 SeiteReadmeArt G. EnziNoch keine Bewertungen
- Pressure Drop of Full Bore Vs Reduced Bore Ball ValvesDokument1 SeitePressure Drop of Full Bore Vs Reduced Bore Ball ValvesArt G. EnziNoch keine Bewertungen
- A1482 F 01Dokument16 SeitenA1482 F 01Art G. EnziNoch keine Bewertungen
- 3rd Membership Meeting - 2013 PDFDokument1 Seite3rd Membership Meeting - 2013 PDFArt G. EnziNoch keine Bewertungen
- Instrument Power Cable Sizing Part 1Dokument2 SeitenInstrument Power Cable Sizing Part 1Art G. EnziNoch keine Bewertungen
- Volume Tank Sizing For Shutdown Valve ActuatorDokument2 SeitenVolume Tank Sizing For Shutdown Valve ActuatorArt G. EnziNoch keine Bewertungen
- How To Speak Like A LeaderDokument2 SeitenHow To Speak Like A LeaderArt G. EnziNoch keine Bewertungen
- Steam Piping CalculationDokument1 SeiteSteam Piping CalculationArt G. EnziNoch keine Bewertungen
- A1482 F 01Dokument16 SeitenA1482 F 01Art G. EnziNoch keine Bewertungen
- Actuator Selection Guide For Flow-Tek Ball ValvesDokument16 SeitenActuator Selection Guide For Flow-Tek Ball ValvesArt G. Enzi100% (1)
- How To Speak Like A LeaderDokument2 SeitenHow To Speak Like A LeaderArt G. EnziNoch keine Bewertungen
- Volume Tank Sizing For Shutdown Valve ActuatorDokument2 SeitenVolume Tank Sizing For Shutdown Valve ActuatorArt G. EnziNoch keine Bewertungen
- A Review of Postweld Heat Treatment Code ExemptionDokument16 SeitenA Review of Postweld Heat Treatment Code ExemptionArt G. EnziNoch keine Bewertungen
- R&AC Lecture 1Dokument19 SeitenR&AC Lecture 1jojovaliaveetilNoch keine Bewertungen
- Flow Meter Selection GuideDokument2 SeitenFlow Meter Selection GuideArt G. EnziNoch keine Bewertungen
- Instrument Air Consumption CalculationDokument1 SeiteInstrument Air Consumption CalculationArt G. Enzi100% (1)
- Annular VelocityDokument2 SeitenAnnular VelocitygateauxboyNoch keine Bewertungen
- Local PWHT For Fin Tubes Rev-1Dokument1 SeiteLocal PWHT For Fin Tubes Rev-1Art G. EnziNoch keine Bewertungen
- Trays and Packed TowersDokument71 SeitenTrays and Packed TowersArt G. Enzi100% (1)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- HCLDokument8 SeitenHCLlalit shakhaNoch keine Bewertungen
- (M1 Technical) Cpe0011lDokument12 Seiten(M1 Technical) Cpe0011lJoel CatapangNoch keine Bewertungen
- Chapter 7 Shaft AlignmentDokument29 SeitenChapter 7 Shaft Alignmentعبدالحافظ زايدNoch keine Bewertungen
- Mathematical Model For LCL Filter With AFE ConverterDokument4 SeitenMathematical Model For LCL Filter With AFE ConverterSubash Chandar AdikesavanNoch keine Bewertungen
- Aee1 SkriptDokument186 SeitenAee1 SkriptCristian PanaNoch keine Bewertungen
- 750 Multilin Feeder Management Relay ManualDokument446 Seiten750 Multilin Feeder Management Relay ManualFerdinandja100% (1)
- TIME TABLE - M.E/M.Tech. - APRIL/MAY-2010 Regulations: 2005Dokument12 SeitenTIME TABLE - M.E/M.Tech. - APRIL/MAY-2010 Regulations: 2005Sathis KumarNoch keine Bewertungen
- Wind Loads Calculation Eurocode1Dokument1 SeiteWind Loads Calculation Eurocode1Karthik KrishNoch keine Bewertungen
- 6-Quantum-Particle (Students Copy)Dokument12 Seiten6-Quantum-Particle (Students Copy)Kunal kumarNoch keine Bewertungen
- The Key To Super Consciousness Chapter 1Dokument6 SeitenThe Key To Super Consciousness Chapter 1Will FortuneNoch keine Bewertungen
- Question Bank DSP (Unit III, IV, VDokument8 SeitenQuestion Bank DSP (Unit III, IV, VJahnavi Chowdary0% (1)
- Eye TrackingDokument13 SeitenEye TrackingRohit KoulNoch keine Bewertungen
- Cleaning Validation ProtocolDokument6 SeitenCleaning Validation ProtocolVega life sciences100% (1)
- Spesifikasi Teknis Hyperion X9 PDFDokument4 SeitenSpesifikasi Teknis Hyperion X9 PDFDjuli AgusNoch keine Bewertungen
- Rajshahi University of Engineering and Technology, RajshahiDokument9 SeitenRajshahi University of Engineering and Technology, RajshahiShakil Ahmed100% (1)
- Analysis of Shear Walls For Multi-Storey Timber BuildingsDokument54 SeitenAnalysis of Shear Walls For Multi-Storey Timber BuildingsrahimmullaNoch keine Bewertungen
- Coax Catalog - Times Microwave SystemDokument80 SeitenCoax Catalog - Times Microwave SystemweirdjNoch keine Bewertungen
- Charged Particle Simulation: CST Studio SuiteDokument2 SeitenCharged Particle Simulation: CST Studio SuiteАлександр СавченкоNoch keine Bewertungen
- Ricoh mpc307 407 Parts ManualDokument244 SeitenRicoh mpc307 407 Parts Manualmark adams50% (2)
- SPHL Sample ProblemsDokument20 SeitenSPHL Sample ProblemsĐức TiếnNoch keine Bewertungen
- Formulas For Physics 1Dokument7 SeitenFormulas For Physics 1thejesterraceNoch keine Bewertungen
- Homework Solutions/Kinetics 1Dokument11 SeitenHomework Solutions/Kinetics 1Eduardo Rosado HerreraNoch keine Bewertungen
- Experiment: 1 Parallel Flow Heat ExchangerDokument18 SeitenExperiment: 1 Parallel Flow Heat ExchangerAnonymous QM0NLqZONoch keine Bewertungen
- DLL Week 2 G7 Science 22-23 Q2Dokument28 SeitenDLL Week 2 G7 Science 22-23 Q2Lady MayugaNoch keine Bewertungen
- Sample Pure PaperDokument28 SeitenSample Pure PapersaNoch keine Bewertungen
- 17 Reinforced ConcreteDokument46 Seiten17 Reinforced ConcreteJetty CruzNoch keine Bewertungen
- Hardness Conversion Chart 3Dokument3 SeitenHardness Conversion Chart 3rajarshi6666Noch keine Bewertungen
- R05410403 OpticalcommunicationsDokument8 SeitenR05410403 Opticalcommunications9010469071Noch keine Bewertungen
- Tutorial Sheet (ME324) 2018-19Dokument1 SeiteTutorial Sheet (ME324) 2018-19Asif SadarNoch keine Bewertungen
- D 6988 - 03 Medicion de CalibreDokument7 SeitenD 6988 - 03 Medicion de CalibreMiguelAngelPerezEsparzaNoch keine Bewertungen