Das könnte Ihnen auch gefallen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- VRF V5X GreskeDokument45 SeitenVRF V5X GreskeStevan SteticNoch keine Bewertungen
- IntrnDokument17 SeitenIntrnsooraj naikNoch keine Bewertungen
- PrintDokument9 SeitenPrintJob MandezNoch keine Bewertungen
- Adjustable Precision Shunt Regulator Reference DiodeDokument8 SeitenAdjustable Precision Shunt Regulator Reference DiodedarioNoch keine Bewertungen
- VisioProfessionalMastersList PDFDokument274 SeitenVisioProfessionalMastersList PDFtedy susNoch keine Bewertungen
- Supplement Schematic For The Electrical System Emcp Ii+Dokument4 SeitenSupplement Schematic For The Electrical System Emcp Ii+Эльдар АптрахимовNoch keine Bewertungen
- Honda IDSI SM - 5 PDFDokument14 SeitenHonda IDSI SM - 5 PDFauto projectNoch keine Bewertungen
- Lighting DesignDokument178 SeitenLighting DesignEderson Vertuan100% (3)
- TVT Series Operator ManualDokument268 SeitenTVT Series Operator ManualGeorge Bogdan100% (4)
- Daikin DAR SpecsDokument8 SeitenDaikin DAR SpecsGian Carlos Gonzales ChaconNoch keine Bewertungen
- Cata B 600Dokument33 SeitenCata B 600Ionuţ Florin RaclăuNoch keine Bewertungen
- 2006 Can-Am Outlander Max 400 H.O. XT ManualDokument164 Seiten2006 Can-Am Outlander Max 400 H.O. XT Manualprotrek777Noch keine Bewertungen
- AsdwDokument56 SeitenAsdwsorcNoch keine Bewertungen
- Oil Module: C F D H ADokument2 SeitenOil Module: C F D H Adaniel_jorge_10Noch keine Bewertungen
- PU360Dokument38 SeitenPU360schservNoch keine Bewertungen
- 1 1 1 A B SimplemachinesinclinedplanewedgescrewDokument19 Seiten1 1 1 A B Simplemachinesinclinedplanewedgescrewapi-366546603Noch keine Bewertungen
- Samsung Ue40f8000sl Ue46f8000sl Ue55f8000sl Ue65f8000sl Ue75f8000sl Chassis U90a PDFDokument77 SeitenSamsung Ue40f8000sl Ue46f8000sl Ue55f8000sl Ue65f8000sl Ue75f8000sl Chassis U90a PDFSiengNoch keine Bewertungen
- Field ManualDokument22 SeitenField ManualDamienNoch keine Bewertungen
- Honeywell IS2535 Install GuideDokument2 SeitenHoneywell IS2535 Install GuideAlarm Grid Home Security and Alarm MonitoringNoch keine Bewertungen
- Laundry Business Expense EstimateDokument1 SeiteLaundry Business Expense EstimateTommy Wilmark TampubolonNoch keine Bewertungen
- Belarus MTZ 50 52 Operations MaintenancesDokument36 SeitenBelarus MTZ 50 52 Operations Maintenanceshotmail100% (1)
- Towers 140425022025 Phpapp02Dokument72 SeitenTowers 140425022025 Phpapp02GeorgeEdward100% (1)
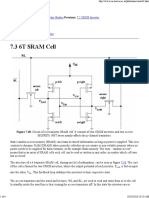
- 7.3 6T SRAM Cell: 7.4 Ring Oscillator 7. Case Studies 7.2 CMOS InverterDokument4 Seiten7.3 6T SRAM Cell: 7.4 Ring Oscillator 7. Case Studies 7.2 CMOS InverterGowtham SpNoch keine Bewertungen
- Usb Hardware TokenDokument24 SeitenUsb Hardware TokenquezeeNoch keine Bewertungen
- Evidence Plan: Machining NCII Turn Work Piece (Intermediate)Dokument12 SeitenEvidence Plan: Machining NCII Turn Work Piece (Intermediate)alice jane lagsa100% (1)
- W-L-1054 Pipe Through Gyp Board AssemblyDokument2 SeitenW-L-1054 Pipe Through Gyp Board AssemblyJason StelleNoch keine Bewertungen
- Land Rover Factory D3 Air Suspension DescriptionDokument22 SeitenLand Rover Factory D3 Air Suspension Descriptionhelen100% (1)
- Writing BDR (JULIANA)Dokument2 SeitenWriting BDR (JULIANA)jodie comerNoch keine Bewertungen