Das könnte Ihnen auch gefallen
- Physics Project Class 11Dokument18 SeitenPhysics Project Class 11Aarya Rajesh71% (55)
- LEARJET 45 AC Electrical SystemDokument4 SeitenLEARJET 45 AC Electrical SystemRAFAEL MANZANILLANoch keine Bewertungen
- Power System LecturesDokument422 SeitenPower System Lecturessnitin26Noch keine Bewertungen
- Control Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud) PDFDokument183 SeitenControl Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud) PDFShakil Ahmed100% (1)
- Introduction to Power System ProtectionVon EverandIntroduction to Power System ProtectionBewertung: 5 von 5 Sternen5/5 (1)
- تقرير psaDokument8 Seitenتقرير psaMarwan MohamedNoch keine Bewertungen
- Electromagnetic Levitation System: An Experimental ApproachDokument7 SeitenElectromagnetic Levitation System: An Experimental Approachsh1n00b1Noch keine Bewertungen
- Transient Stability of A Multi Machine Power System: Devender Kumar, Balwinder Singh SurjanDokument4 SeitenTransient Stability of A Multi Machine Power System: Devender Kumar, Balwinder Singh SurjanVerruumm AmineNoch keine Bewertungen
- EE5702R Advance Power System Analysis:: Power System State Estimation IDokument68 SeitenEE5702R Advance Power System Analysis:: Power System State Estimation IChetan KotwalNoch keine Bewertungen
- Power Systems - Basic Concepts and Applications - Part Ii: Pdhonline Course E105 (12 PDH)Dokument27 SeitenPower Systems - Basic Concepts and Applications - Part Ii: Pdhonline Course E105 (12 PDH)koti_sreedharNoch keine Bewertungen
- Representation of Transient Stability For Power System Dynamics Using Numerical Integration Method and DampingDokument7 SeitenRepresentation of Transient Stability For Power System Dynamics Using Numerical Integration Method and DampingInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- ZFGHFGHFGDokument6 SeitenZFGHFGHFGAhmad Firdaus Zawawil AnwarNoch keine Bewertungen
- Chapter 5Dokument73 SeitenChapter 5Niket GuptaNoch keine Bewertungen
- Application Of..... (ICEE2010) PDFDokument6 SeitenApplication Of..... (ICEE2010) PDFdennypolariszNoch keine Bewertungen
- Transient StabilityDokument38 SeitenTransient Stabilityskr810529Noch keine Bewertungen
- Power Quality Improvement in DC Drives Using Matlab/SimulinkDokument5 SeitenPower Quality Improvement in DC Drives Using Matlab/SimulinkwisdombasedcomputingNoch keine Bewertungen
- A New Control Strategy of A Wind Power Generation andDokument8 SeitenA New Control Strategy of A Wind Power Generation andjnyagatoNoch keine Bewertungen
- Researches Regarding Functional Stabilization of Electro-Hydraulic Servo-SystemsDokument4 SeitenResearches Regarding Functional Stabilization of Electro-Hydraulic Servo-SystemsMaria Gabriela BusteloNoch keine Bewertungen
- Inverted Pendulum SystemDokument9 SeitenInverted Pendulum Systemمحمد المهندسNoch keine Bewertungen
- Exp01 EEE318Dokument7 SeitenExp01 EEE318Abid AbdullahNoch keine Bewertungen
- Tute Lea 2013Dokument6 SeitenTute Lea 2013venkatachalamNoch keine Bewertungen
- Lec1-Advancne Power System YbusDokument48 SeitenLec1-Advancne Power System Ybusbukit_guestNoch keine Bewertungen
- Electric MachinesDokument17 SeitenElectric Machinespritt2010Noch keine Bewertungen
- Chapter-7 Power System Stability: Prepared by Balaram Das, EE Dept., GIET, GunupurDokument22 SeitenChapter-7 Power System Stability: Prepared by Balaram Das, EE Dept., GIET, Gunupurdishore312Noch keine Bewertungen
- Control of DC Electric MotorDokument16 SeitenControl of DC Electric MotorNa ChNoch keine Bewertungen
- Steady State Error of A SystemDokument10 SeitenSteady State Error of A SystemSriharsha PidaparthiNoch keine Bewertungen
- Motor Modeling and Position Control Lab Week 3: Closed Loop ControlDokument14 SeitenMotor Modeling and Position Control Lab Week 3: Closed Loop ControlJanett TrujilloNoch keine Bewertungen
- Control TheoryDokument24 SeitenControl TheoryFatoom HashimNoch keine Bewertungen
- A Sliding Mode-Multimodel Control For A Sensorless Pumping SystemDokument6 SeitenA Sliding Mode-Multimodel Control For A Sensorless Pumping SystemKatherine DukeNoch keine Bewertungen
- Power Engineering ConceptsDokument21 SeitenPower Engineering ConceptsSreedevi Valsan100% (1)
- Performance Analysis of A Single-Phase Ac Voltage Controller Under Induction Motor LoadDokument8 SeitenPerformance Analysis of A Single-Phase Ac Voltage Controller Under Induction Motor LoadInternational Journal of Research in Engineering and TechnologyNoch keine Bewertungen
- Modeling of Dynamic SystemsmesinDokument19 SeitenModeling of Dynamic SystemsmesinRifqi Bustanul FaozanNoch keine Bewertungen
- Oos and TorsionDokument14 SeitenOos and TorsionlisusedNoch keine Bewertungen
- Software Phase Locked LoopDokument7 SeitenSoftware Phase Locked LoopBinyam YohannesNoch keine Bewertungen
- Review QuestionsDokument15 SeitenReview QuestionsSuganthiVasanNoch keine Bewertungen
- Synthesis of The Adaptive Excitation Control System of High Power Synchronous GeneratorsDokument14 SeitenSynthesis of The Adaptive Excitation Control System of High Power Synchronous Generators3KaiserENoch keine Bewertungen
- Genrou Gensal Gentpf GentpjDokument14 SeitenGenrou Gensal Gentpf GentpjSabaMannan123Noch keine Bewertungen
- Online Control of SVC Using ANN Based Pole Placement ApproachDokument5 SeitenOnline Control of SVC Using ANN Based Pole Placement ApproachAbdo AliNoch keine Bewertungen
- Control Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud)Dokument183 SeitenControl Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud)Anik PaulNoch keine Bewertungen
- MCLECTURE2Dokument57 SeitenMCLECTURE2teknikpembakaran2013Noch keine Bewertungen
- A DC Motor Driven by A DC/DC Boost Converter-Inverter: Modeling and SimulationDokument6 SeitenA DC Motor Driven by A DC/DC Boost Converter-Inverter: Modeling and SimulationAlex VincentNoch keine Bewertungen
- Realization of An Asynchronous Six-Phase Induction Motor Drive Test-RigDokument5 SeitenRealization of An Asynchronous Six-Phase Induction Motor Drive Test-Rigsathish100% (1)
- Fault Detection of PM Synchronous Motor Via Modulating FunctionsDokument6 SeitenFault Detection of PM Synchronous Motor Via Modulating Functionsjithesh87Noch keine Bewertungen
- Lagrange Equation 1Dokument32 SeitenLagrange Equation 1Gthulasi78Noch keine Bewertungen
- Control System NotesDokument199 SeitenControl System NotesCarson R. Dick100% (2)
- Dynamic Models: Part D: Electromechanical SystemsDokument35 SeitenDynamic Models: Part D: Electromechanical SystemsAkh AsrofNoch keine Bewertungen
- 23D AdvanceDokument8 Seiten23D AdvancePATEL SWAPNEELNoch keine Bewertungen
- Power System Analysis: Fault Analysis Tom Overbye and Ross BaldickDokument35 SeitenPower System Analysis: Fault Analysis Tom Overbye and Ross Baldicka_r_vijayanand6550Noch keine Bewertungen
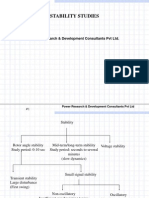
- Stability Studies: Power Research & Development Consultants PVT LTDDokument60 SeitenStability Studies: Power Research & Development Consultants PVT LTDpartha_gang4526Noch keine Bewertungen
- 45 1530697786 - 04-07-2018 PDFDokument5 Seiten45 1530697786 - 04-07-2018 PDFrahul sharmaNoch keine Bewertungen
- Basic Integrated Modelling: A Case Study: Mario E. Salgado and Diego R. OyarzúnDokument15 SeitenBasic Integrated Modelling: A Case Study: Mario E. Salgado and Diego R. Oyarzúnñ=?!2Noch keine Bewertungen
- Synchronous Machine Models - 1: by Prof. C. RadhakrishnaDokument20 SeitenSynchronous Machine Models - 1: by Prof. C. Radhakrishnani60Noch keine Bewertungen
- Power System Dynamics Simulation Tutorial 1Dokument9 SeitenPower System Dynamics Simulation Tutorial 1Suvra PattanayakNoch keine Bewertungen
- 18EE71-Module-5-Part 1 Notes - 2022Dokument12 Seiten18EE71-Module-5-Part 1 Notes - 2022siddeshgssiddu345Noch keine Bewertungen
- Sensors: Sensorless Control of The Permanent Magnet Synchronous MotorDokument25 SeitenSensors: Sensorless Control of The Permanent Magnet Synchronous MotorSteve DemirelNoch keine Bewertungen
- Unit 4 Lecture 05 Transient Stability Assesment With Isturbance Due To Mechanical Power InputDokument15 SeitenUnit 4 Lecture 05 Transient Stability Assesment With Isturbance Due To Mechanical Power InputAditya AdityaNoch keine Bewertungen
- Electrical Correcting Elements in Automatic Control and Regulation CircuitsVon EverandElectrical Correcting Elements in Automatic Control and Regulation CircuitsNoch keine Bewertungen
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlVon EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlBewertung: 5 von 5 Sternen5/5 (1)
- Introduction to Power System ProtectionVon EverandIntroduction to Power System ProtectionNoch keine Bewertungen
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorVon EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNoch keine Bewertungen
- Fast Response Ancillary Services: Erldc, PosocoDokument18 SeitenFast Response Ancillary Services: Erldc, PosocoChetan KotwalNoch keine Bewertungen
- nfs13 PDFDokument21 Seitennfs13 PDFChetan KotwalNoch keine Bewertungen
- We Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsDokument21 SeitenWe Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsChetan KotwalNoch keine Bewertungen
- Load Sharing Regulation of A Grid-Connected Solar Photovoltaic PV System in Karbala CityDokument15 SeitenLoad Sharing Regulation of A Grid-Connected Solar Photovoltaic PV System in Karbala CityChetan KotwalNoch keine Bewertungen
- Energies 10 00523 PDFDokument22 SeitenEnergies 10 00523 PDFChetan KotwalNoch keine Bewertungen
- Classifiers PDFDokument18 SeitenClassifiers PDFChetan KotwalNoch keine Bewertungen
- AC Power Quality and StandardsDokument13 SeitenAC Power Quality and StandardsChetan KotwalNoch keine Bewertungen
- Ashraf 2014Dokument6 SeitenAshraf 2014Chetan KotwalNoch keine Bewertungen
- Yadav 2019Dokument27 SeitenYadav 2019Chetan KotwalNoch keine Bewertungen
- Power Market Power Trading Power Exchange PDFDokument65 SeitenPower Market Power Trading Power Exchange PDFChetan KotwalNoch keine Bewertungen
- Design of The Pv-Upqc System For Long Voltage Interruption CompensationDokument17 SeitenDesign of The Pv-Upqc System For Long Voltage Interruption CompensationChetan KotwalNoch keine Bewertungen
- Transmission Network Reduction Method Using Nonlinear OptimizationDokument7 SeitenTransmission Network Reduction Method Using Nonlinear OptimizationChetan KotwalNoch keine Bewertungen
- Flow: A For Stabilify: Continuation Power Tool Parametric Voltage Security AnalysisDokument6 SeitenFlow: A For Stabilify: Continuation Power Tool Parametric Voltage Security AnalysisChetan KotwalNoch keine Bewertungen
- Sub Synchronous Resonance: Facts ControllersDokument17 SeitenSub Synchronous Resonance: Facts ControllersChetan KotwalNoch keine Bewertungen
- Application of REI Equivalent in Reactive Power Optimization Control in Regional Power GridDokument4 SeitenApplication of REI Equivalent in Reactive Power Optimization Control in Regional Power GridChetan KotwalNoch keine Bewertungen
- ObjectivesDokument15 SeitenObjectivesChetan KotwalNoch keine Bewertungen
- Etap 18 New Features BrochureDokument12 SeitenEtap 18 New Features BrochureChetan KotwalNoch keine Bewertungen
- 11 Major Power Grid BlackoutsDokument32 Seiten11 Major Power Grid BlackoutsChetan KotwalNoch keine Bewertungen
- Research On Steady State Voltage Stability of Power System With Distributed Static Series CompensatorDokument5 SeitenResearch On Steady State Voltage Stability of Power System With Distributed Static Series CompensatorChetan KotwalNoch keine Bewertungen
- SVC Applications: Increase in Steady-State Power-Transfer CapacityDokument21 SeitenSVC Applications: Increase in Steady-State Power-Transfer CapacityChetan KotwalNoch keine Bewertungen
- Energies: A Novel Ground Fault Non-Directional Selective Protection Method For Ungrounded Distribution NetworksDokument26 SeitenEnergies: A Novel Ground Fault Non-Directional Selective Protection Method For Ungrounded Distribution NetworksChetan KotwalNoch keine Bewertungen
- Brochure GIAN FebDokument2 SeitenBrochure GIAN FebChetan KotwalNoch keine Bewertungen
- Distribution Automation Summary Report - 09!29!16Dokument115 SeitenDistribution Automation Summary Report - 09!29!16Chetan KotwalNoch keine Bewertungen
- Intelligent Power Distribution Network Feeder Realization Using Simulation & PLC Based Hardware ModelDokument6 SeitenIntelligent Power Distribution Network Feeder Realization Using Simulation & PLC Based Hardware ModelChetan KotwalNoch keine Bewertungen
- 1.1 Proposal of Smart GridDokument6 Seiten1.1 Proposal of Smart GridChetan KotwalNoch keine Bewertungen
- WalveDokument34 SeitenWalveChetan KotwalNoch keine Bewertungen
- Touch Screen Based Industrial Crane ControllingDokument3 SeitenTouch Screen Based Industrial Crane ControllingijsretNoch keine Bewertungen
- Biomedical and Engineering Fluid Mechanics: Different MechanicalDokument12 SeitenBiomedical and Engineering Fluid Mechanics: Different MechanicalYosh LisingNoch keine Bewertungen
- Getting Students Over MisconceptionsDokument62 SeitenGetting Students Over MisconceptionsNguyen Trinh Hai NgocNoch keine Bewertungen
- Sudden Enlargement & ContractionDokument2 SeitenSudden Enlargement & ContractionFatin HazwaniNoch keine Bewertungen
- GATE Electrical 2015 Solved Paper by Kanodia PDFDokument629 SeitenGATE Electrical 2015 Solved Paper by Kanodia PDFarshad100% (1)
- Ee 1403 Solid State DrivesDokument14 SeitenEe 1403 Solid State DrivesPanchi AgrawalNoch keine Bewertungen
- Michelson InterferometerDokument9 SeitenMichelson InterferometerSachinLambaNoch keine Bewertungen
- Name: Course: Yr. & Sec: Section: Time: Room: Instructor:: I. ObjectivesDokument6 SeitenName: Course: Yr. & Sec: Section: Time: Room: Instructor:: I. Objectiveskeempee meeraNoch keine Bewertungen
- Unified A Approach To Power Transmission: Powfbflow Controller: ControlDokument13 SeitenUnified A Approach To Power Transmission: Powfbflow Controller: Controlmass1984Noch keine Bewertungen
- Physics ProjectDokument9 SeitenPhysics Projectvishal toshiwal100% (3)
- NUS SampleDokument7 SeitenNUS SampleVũ LêNoch keine Bewertungen
- 2.wave OpticsexerciseDokument32 Seiten2.wave OpticsexerciseGomes RibeiroNoch keine Bewertungen
- AML800M8ABATiM-7100KW-8140005381 01Dokument11 SeitenAML800M8ABATiM-7100KW-8140005381 01Jauhary HarrysNoch keine Bewertungen
- Transmission Line EquationsDokument26 SeitenTransmission Line Equationsilg1Noch keine Bewertungen
- Boiler Inspection Corrosion and Tube ThicknessDokument117 SeitenBoiler Inspection Corrosion and Tube Thicknesskhalidmh100% (2)
- Pys PracDokument9 SeitenPys PracpfaneloNoch keine Bewertungen
- Practice Unit Test Part 1 - Dynamics (May 2011)Dokument4 SeitenPractice Unit Test Part 1 - Dynamics (May 2011)Shakib FirouziNoch keine Bewertungen
- Matrix Converter Based Direct Torque Control of Induction MotorDokument29 SeitenMatrix Converter Based Direct Torque Control of Induction MotorsambitNoch keine Bewertungen
- Faults in Electrical Power SystemDokument4 SeitenFaults in Electrical Power Systemmaruf048Noch keine Bewertungen
- Dual Polarity NATCODokument2 SeitenDual Polarity NATCOKeryn KimNoch keine Bewertungen
- Allen Bradley NEMA PDFDokument214 SeitenAllen Bradley NEMA PDFtajamul husainNoch keine Bewertungen
- R7310202 Electrical MeasurementsDokument1 SeiteR7310202 Electrical MeasurementssivabharathamurthyNoch keine Bewertungen
- Know How Shunt Reactors PDFDokument62 SeitenKnow How Shunt Reactors PDFpartha_acharya08Noch keine Bewertungen
- Fluid Flow Measurement: Orifice (Part 1)Dokument12 SeitenFluid Flow Measurement: Orifice (Part 1)Marben Leynes-Cereno Agustin-ViernesNoch keine Bewertungen
- P1470Dokument6 SeitenP1470Priya SingNoch keine Bewertungen
- What Is The Difference Between MCB, MCCB, ELCB, and RCCB - EEPDokument5 SeitenWhat Is The Difference Between MCB, MCCB, ELCB, and RCCB - EEPcurazaq100% (1)
- Advanced Power SystemDokument27 SeitenAdvanced Power Systemrare machineNoch keine Bewertungen
- Topic 5.2 - Heating Effect of Electric CurrentsDokument78 SeitenTopic 5.2 - Heating Effect of Electric CurrentsPaul AmezquitaNoch keine Bewertungen