Das könnte Ihnen auch gefallen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Percentile CalculatorDokument5.466 SeitenPercentile Calculatorsiddu_27Noch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Percentile CalculatorDokument5.466 SeitenPercentile Calculatorsiddu_27Noch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Pre Requisite SenateDokument25 SeitenPre Requisite SenatepankazspamNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- MBA in India - Eligibility - 2014-16Dokument13 SeitenMBA in India - Eligibility - 2014-16siddu_27Noch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Response Paper 1 - Sociological ImaginationDokument2 SeitenResponse Paper 1 - Sociological Imaginationsiddu_27Noch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
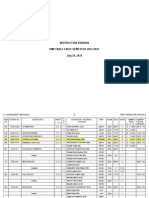
- TimeTable 1st Sem 2014-2015Dokument50 SeitenTimeTable 1st Sem 2014-2015siddu_27Noch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Sociological Imagination - The Promise CH 1 - 5Dokument5 SeitenThe Sociological Imagination - The Promise CH 1 - 5Rodrigo SalgueroNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- 2015 ATP Calendar As of 19082014Dokument1 Seite2015 ATP Calendar As of 19082014Francisco Cristóbal Guilardes MoralesNoch keine Bewertungen
- 24 letsStudyUrduAnIntroductoryCourseDokument519 Seiten24 letsStudyUrduAnIntroductoryCourseTarique Khan100% (1)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- 24 letsStudyUrduAnIntroductoryCourseDokument519 Seiten24 letsStudyUrduAnIntroductoryCourseTarique Khan100% (1)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- A Project Report On Power Factor Improvement in SPRS (Slip Power Recovery Systems) byDokument46 SeitenA Project Report On Power Factor Improvement in SPRS (Slip Power Recovery Systems) bysiddu_27Noch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- BITS-Pilani Time Table 2013 AutumnDokument58 SeitenBITS-Pilani Time Table 2013 AutumnYuvraaj KumarNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Single Phase Induction Motor PDFDokument32 SeitenSingle Phase Induction Motor PDFHarsh RanaNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Electrical Drives MCQDokument7 SeitenElectrical Drives MCQSaber AbdelaalNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- 109ee0039 PDFDokument47 Seiten109ee0039 PDFrijilpoothadiNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- High Power Variable Frequency Generator For Large Civil AircraftDokument4 SeitenHigh Power Variable Frequency Generator For Large Civil AircraftTianxiang BearNoch keine Bewertungen
- Session 2004: 21, Rue D'artois, F-75008 Paris © CigréDokument8 SeitenSession 2004: 21, Rue D'artois, F-75008 Paris © CigréOscar GarciaNoch keine Bewertungen
- Vincent Del Toro - Chap 06Dokument24 SeitenVincent Del Toro - Chap 06Susie CornejoNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Lecture 1 Introduction To DC Motor DrivesDokument22 SeitenLecture 1 Introduction To DC Motor DrivesNovic JohnsNoch keine Bewertungen
- Mock Test - 15 QuestionsDokument10 SeitenMock Test - 15 QuestionsrajkumarthatiNoch keine Bewertungen
- VFTDokument5 SeitenVFTJawad IqbalNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Sensorless BLDCControl S08 MP16Dokument52 SeitenSensorless BLDCControl S08 MP16Sachin PatilNoch keine Bewertungen
- Modeling of Synchronous Generators: 99% of The Electric Power Allover The World Is Generated by Synchronous GeneratorsDokument22 SeitenModeling of Synchronous Generators: 99% of The Electric Power Allover The World Is Generated by Synchronous Generatorssatyakar_vvkNoch keine Bewertungen
- 131T8678 - 24kV 4.5barg - CleanedDokument35 Seiten131T8678 - 24kV 4.5barg - Cleanedamir_itsNoch keine Bewertungen
- Induction Generator Working TheoryDokument2 SeitenInduction Generator Working TheorykalpanadeviNoch keine Bewertungen
- Lab MachineDokument11 SeitenLab MachineAhmad KhaidirNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- IEEE Transactions On Energy Conversion, Vol. 3, No. 2, June 1988Dokument7 SeitenIEEE Transactions On Energy Conversion, Vol. 3, No. 2, June 1988Arif IqbalNoch keine Bewertungen
- Iot Based Water ManagementDokument5 SeitenIot Based Water ManagementAjayPanickerNoch keine Bewertungen
- Old Quesition Papers (III Sem) Dec-13Dokument52 SeitenOld Quesition Papers (III Sem) Dec-139966197483Noch keine Bewertungen
- (S) DFV 112 DFV132S Foot MDokument1 Seite(S) DFV 112 DFV132S Foot Mcarlos aguileraNoch keine Bewertungen
- Yogesh Report PDFDokument60 SeitenYogesh Report PDFNishant GrohaNoch keine Bewertungen
- Telekinetic Devices: Prof. DR Jan PajakDokument90 SeitenTelekinetic Devices: Prof. DR Jan PajakBOBY VARKEYNoch keine Bewertungen
- Motor DCDokument52 SeitenMotor DCAnna KusumaNoch keine Bewertungen
- Impact of Permanent Magnets Shape and Arrangement For Selected Parameters in Coreless Axial Flux GeneratorDokument7 SeitenImpact of Permanent Magnets Shape and Arrangement For Selected Parameters in Coreless Axial Flux GeneratorAbdelali AabadaNoch keine Bewertungen
- Induction Motor Manual (E)Dokument60 SeitenInduction Motor Manual (E)sizmaruNoch keine Bewertungen
- Direct - Drive - Linear-Motors enDokument7 SeitenDirect - Drive - Linear-Motors enJavierNoch keine Bewertungen
- E-Bike ReportDokument29 SeitenE-Bike ReportUnais KK0% (1)
- Inadvertent Energizing PRTN - of Syn GenDokument2 SeitenInadvertent Energizing PRTN - of Syn GenRajendra Prasath ThangamaniNoch keine Bewertungen
- Field Oriented ControlDokument16 SeitenField Oriented ControlNik RumziNoch keine Bewertungen
- EE211 Exam S1-09Dokument8 SeitenEE211 Exam S1-09abadialshry_53Noch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Aalborg Universitet: Kallesøe, CarstenDokument230 SeitenAalborg Universitet: Kallesøe, Carstenmasimaha1379Noch keine Bewertungen
- ThesisDokument4 SeitenThesisSanjoy PanditNoch keine Bewertungen