Das könnte Ihnen auch gefallen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Physics: FiitjeeDokument1.319 SeitenPhysics: FiitjeeBISWAJEET100% (2)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Mach 3 MillDokument157 SeitenMach 3 Millafricano333100% (1)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Ethics in Clinical ResearchDokument3 SeitenEthics in Clinical ResearchAPLCTN100% (1)
- Product and Service DesignDokument17 SeitenProduct and Service DesignRahul KhannaNoch keine Bewertungen
- Design of Absorber: 5.1 AbsorptionsDokument13 SeitenDesign of Absorber: 5.1 AbsorptionsNaya Septri HanaNoch keine Bewertungen
- Power Semiconductor Applications - Philips-NXPDokument609 SeitenPower Semiconductor Applications - Philips-NXPnanditonanaman100% (2)
- Padole Driving School - 093259 22170 - AmravatiDokument1 SeitePadole Driving School - 093259 22170 - AmravatiAPLCTNNoch keine Bewertungen
- Ibps RRB Clerk Prelims 2020 Model Paper PDF Set 1Dokument25 SeitenIbps RRB Clerk Prelims 2020 Model Paper PDF Set 1APLCTNNoch keine Bewertungen
- 2.1 2SC5200 & 2SA1943 Pow AmplifierDokument2 Seiten2.1 2SC5200 & 2SA1943 Pow AmplifierAPLCTNNoch keine Bewertungen
- RRB NTPC Post-Wise Job Profile and Description 2022Dokument1 SeiteRRB NTPC Post-Wise Job Profile and Description 2022APLCTNNoch keine Bewertungen
- Awards and Honors Questions and Answers PDFDokument11 SeitenAwards and Honors Questions and Answers PDFAPLCTNNoch keine Bewertungen
- Practice Set: Clerical Cadre (Pre.) ExamDokument9 SeitenPractice Set: Clerical Cadre (Pre.) ExamAPLCTNNoch keine Bewertungen
- Ac Motor Controller For Modern Appliances Using Ls7311: FeaturesDokument3 SeitenAc Motor Controller For Modern Appliances Using Ls7311: FeaturesAPLCTNNoch keine Bewertungen
- n the field of biomedical engineering, specifically with biomechanics, transport phenomena, biomechatronics, bionanotechnology, and modelling of biological systems. W16 engine of the Bugatti Veyron. Mechanical engineers design engines, power plants, other machines... ...structures, and vehicles of all sizes. History Education Job duties Subdisciplines Modern tools Areas of research Related fields See also References Further reading External links Last edited 4 days ago by Smenjas Wikipedia Content is available under CC BY-SA 3.0 unless otherwise noted. Terms of UsePrivacyDesktopDokument2 Seitenn the field of biomedical engineering, specifically with biomechanics, transport phenomena, biomechatronics, bionanotechnology, and modelling of biological systems. W16 engine of the Bugatti Veyron. Mechanical engineers design engines, power plants, other machines... ...structures, and vehicles of all sizes. History Education Job duties Subdisciplines Modern tools Areas of research Related fields See also References Further reading External links Last edited 4 days ago by Smenjas Wikipedia Content is available under CC BY-SA 3.0 unless otherwise noted. Terms of UsePrivacyDesktopAPLCTNNoch keine Bewertungen
- Sbi Po Exam: Prelims (English) Previous PaperDokument12 SeitenSbi Po Exam: Prelims (English) Previous PaperAPLCTNNoch keine Bewertungen
- SC 5200 1943Dokument2 SeitenSC 5200 1943APLCTNNoch keine Bewertungen
- TDA2030 Subwoofer PCB BoardDokument1 SeiteTDA2030 Subwoofer PCB BoardAPLCTNNoch keine Bewertungen
- Johnson Motor High TorqueDokument1 SeiteJohnson Motor High TorqueAPLCTNNoch keine Bewertungen
- Schematic Mono-4558b Sheet-1 20180420211056 PDFDokument1 SeiteSchematic Mono-4558b Sheet-1 20180420211056 PDFAPLCTNNoch keine Bewertungen
- Confusing GK Questions and AnswersDokument5 SeitenConfusing GK Questions and AnswersAPLCTNNoch keine Bewertungen
- Competitive Exams: Capacitors: ExamraceDokument1 SeiteCompetitive Exams: Capacitors: ExamraceAPLCTNNoch keine Bewertungen
- Provisional Allotment List of CAP Round-II For The Admission To The First Year of Four YearDokument9 SeitenProvisional Allotment List of CAP Round-II For The Admission To The First Year of Four YearAPLCTNNoch keine Bewertungen
- 0 - 30 V Adjustable Voltage, Current Stabilized VoltageDokument2 Seiten0 - 30 V Adjustable Voltage, Current Stabilized VoltageAPLCTNNoch keine Bewertungen
- Priti Prabhakar Wakodikar and Bhushan MankarDokument9 SeitenPriti Prabhakar Wakodikar and Bhushan MankarAPLCTN0% (1)
- ELECTRICAL PROJECTS USING MATLAB/SIMULINK Multi Machine Power System Stability Enhancement Using Static Synchronous Series Compensator (SSSC)Dokument5 SeitenELECTRICAL PROJECTS USING MATLAB/SIMULINK Multi Machine Power System Stability Enhancement Using Static Synchronous Series Compensator (SSSC)APLCTNNoch keine Bewertungen
- DocumentDokument4 SeitenDocumentAPLCTNNoch keine Bewertungen
- A Particle Swarm Optimization For Optimal Reactive Power DispatchDokument9 SeitenA Particle Swarm Optimization For Optimal Reactive Power DispatchInternational Journal of Research in Science & TechnologyNoch keine Bewertungen
- Standard Photo Print SizesDokument2 SeitenStandard Photo Print SizesAPLCTNNoch keine Bewertungen
- Understanding Water Discounts and Lye Solution in SoapmakingDokument7 SeitenUnderstanding Water Discounts and Lye Solution in SoapmakingIoanaNoch keine Bewertungen
- Mathematics IDokument1 SeiteMathematics IYadav MaheshNoch keine Bewertungen
- Sakshi: 7.coordinate GeometryDokument3 SeitenSakshi: 7.coordinate GeometryMartyn MartynNoch keine Bewertungen
- Itp582b-515-01-Ib 2Dokument12 SeitenItp582b-515-01-Ib 2Cara & Drei Amazing JourneyNoch keine Bewertungen
- Strategik Sains THN 4Dokument9 SeitenStrategik Sains THN 4fletchertchrNoch keine Bewertungen
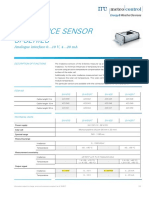
- DB Irradiance Sensor Si-Series en 20171016Dokument3 SeitenDB Irradiance Sensor Si-Series en 20171016Solar ProjectsNoch keine Bewertungen
- A Study of Martensitic Stainless Steel AISI 420 Modified Using Plasma NitridingDokument6 SeitenA Study of Martensitic Stainless Steel AISI 420 Modified Using Plasma NitridingmanishtubNoch keine Bewertungen
- 02 OS90522EN15GLA0 Data StoragesDokument84 Seiten02 OS90522EN15GLA0 Data StoragesElego13thNoch keine Bewertungen
- Dwnload Full Physics 3rd Edition Giambattisata Solutions Manual PDFDokument35 SeitenDwnload Full Physics 3rd Edition Giambattisata Solutions Manual PDFmarcusquyepv100% (12)
- FTKM 0419 B L (Leaflet)Dokument2 SeitenFTKM 0419 B L (Leaflet)Wan SyahlanNoch keine Bewertungen
- Chapter 4 Solutions To Exercises PDFDokument70 SeitenChapter 4 Solutions To Exercises PDFWilly Rodríguez GuerreroNoch keine Bewertungen
- 2020 Specimen Paper 1Dokument16 Seiten2020 Specimen Paper 1YuanWei SiowNoch keine Bewertungen
- IS30 IS50 WM CWL WM-L Schnittstellendoku enDokument250 SeitenIS30 IS50 WM CWL WM-L Schnittstellendoku enspidigeNoch keine Bewertungen
- Is.11921.1993 Fuel Efficiency StandardDokument12 SeitenIs.11921.1993 Fuel Efficiency StandardParminder SinghNoch keine Bewertungen
- Read and Write Action of RAM Using IC 7489Dokument5 SeitenRead and Write Action of RAM Using IC 7489Deepak Kumbhar100% (1)
- ch12 칼리스터 재료과학과 공학 답지Dokument71 Seitench12 칼리스터 재료과학과 공학 답지hayun9999999Noch keine Bewertungen
- Internetworking: 1 Coms22101 Lecture 9Dokument12 SeitenInternetworking: 1 Coms22101 Lecture 9Pradeep RajaNoch keine Bewertungen
- 1) Semester II /1 / IV Exam 2020 (Even) (Old / New Syllabus) BacklogDokument5 Seiten1) Semester II /1 / IV Exam 2020 (Even) (Old / New Syllabus) BacklogHarsh VardhanNoch keine Bewertungen
- Airplane Wing Geometry and ConfigurationsDokument7 SeitenAirplane Wing Geometry and Configurationsh_mahdiNoch keine Bewertungen
- Efficiency Analysis of An Aerospike Nozzle: Dipak J. Choudhari, Uday V. AsolekarDokument5 SeitenEfficiency Analysis of An Aerospike Nozzle: Dipak J. Choudhari, Uday V. AsolekarAswith R ShenoyNoch keine Bewertungen
- Irhlf77214 250V Radhard N MosfetDokument9 SeitenIrhlf77214 250V Radhard N MosfetarsebiscuitsNoch keine Bewertungen
- NuPolar Quality Testing and ComparisonsDokument12 SeitenNuPolar Quality Testing and Comparisonsou82muchNoch keine Bewertungen
- Silver Nanoparticles DataDokument6 SeitenSilver Nanoparticles DataSanwithz SittiNoch keine Bewertungen
- CPE211 Data Structures and Algorithms: Class OrientationDokument9 SeitenCPE211 Data Structures and Algorithms: Class OrientationHaremaibNoch keine Bewertungen