Das könnte Ihnen auch gefallen
- Industrial internet of things Standard RequirementsVon EverandIndustrial internet of things Standard RequirementsNoch keine Bewertungen
- DCSDokument57 SeitenDCSRanjita SinghNoch keine Bewertungen
- GH Cp343-1ex30 76Dokument67 SeitenGH Cp343-1ex30 76KoertBNoch keine Bewertungen
- Thin Clients DOCU V7.3 enDokument75 SeitenThin Clients DOCU V7.3 enMiguel ReyesNoch keine Bewertungen
- Fieldue Fisher TechnicalDokument44 SeitenFieldue Fisher TechnicalProphx Blizice100% (1)
- PLC Primer PDFDokument16 SeitenPLC Primer PDFAnish GoswamiNoch keine Bewertungen
- Simaticpcs7 Stpcs7 Complete English 2010 02Dokument404 SeitenSimaticpcs7 Stpcs7 Complete English 2010 02Eliud RodriguezNoch keine Bewertungen
- Deltav SD Plus Controller (2010)Dokument6 SeitenDeltav SD Plus Controller (2010)Hamza SaiNoch keine Bewertungen
- Brochure Simatic-Wincc enDokument40 SeitenBrochure Simatic-Wincc enRahil AnsariNoch keine Bewertungen
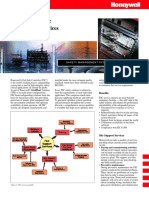
- FSC Maintenance and Support Services: Safety Management SystemsDokument2 SeitenFSC Maintenance and Support Services: Safety Management Systemsmemt0% (1)
- Modicon PremiumDokument459 SeitenModicon Premiumsalmo83:18Noch keine Bewertungen
- Safety Integrated For Process AutomationDokument40 SeitenSafety Integrated For Process AutomationSerge RINAUDONoch keine Bewertungen
- Wonderware - Tech Note 275Dokument29 SeitenWonderware - Tech Note 275Angelito_HBKNoch keine Bewertungen
- s7 1500 CatalogueDokument54 Seitens7 1500 CatalogueBenjamín Cares ZalazarNoch keine Bewertungen
- Configuring Sequences With SFC: Simatic Pcs 7Dokument20 SeitenConfiguring Sequences With SFC: Simatic Pcs 7jriwohd jriwohd100% (1)
- Iec61131 3Dokument37 SeitenIec61131 3spfallasNoch keine Bewertungen
- s71200 System Manual en-US en-USDokument1.352 Seitens71200 System Manual en-US en-USHoàng BửuNoch keine Bewertungen
- s71200 System Manual en-US en-US PDFDokument1.328 Seitens71200 System Manual en-US en-US PDFVanessa Soria100% (1)
- Plcsimadv Simtable Doc v10 enDokument39 SeitenPlcsimadv Simtable Doc v10 enaliNoch keine Bewertungen
- PLC To Deltav Systems MigrationDokument14 SeitenPLC To Deltav Systems MigrationzacriasNoch keine Bewertungen
- ProSafe RS Engineering YMA SA PDFDokument1 SeiteProSafe RS Engineering YMA SA PDFamidi5555913Noch keine Bewertungen
- World's First Truly Integrated Safety Controller: Safe, Reliable and Available Control Without CompromiseDokument6 SeitenWorld's First Truly Integrated Safety Controller: Safe, Reliable and Available Control Without CompromiseDinesh JadavNoch keine Bewertungen
- Difference Between PAC Hardware and PLC, DCSDokument2 SeitenDifference Between PAC Hardware and PLC, DCSsuudonNoch keine Bewertungen
- ControlLogix5000 MSG Instruction - 2.0Dokument13 SeitenControlLogix5000 MSG Instruction - 2.0shijub_001Noch keine Bewertungen
- 12 GSVSSV LabDokument18 Seiten12 GSVSSV LabJavier Omar GinezNoch keine Bewertungen
- Advanced Continuous HistorianDokument7 SeitenAdvanced Continuous HistorianisraelalmaguerNoch keine Bewertungen
- Simatic Et 200SPDokument10 SeitenSimatic Et 200SPmax2007Noch keine Bewertungen
- S7 300 CP343-1-Lean-CX10 76Dokument50 SeitenS7 300 CP343-1-Lean-CX10 76Marcio Sócrates100% (1)
- Ps7doc en-US en-US PDFDokument24 SeitenPs7doc en-US en-US PDFRanaIfteeNoch keine Bewertungen
- 07 - 94R300 - 2 - Configure SCE With I-O and LoopsDokument36 Seiten07 - 94R300 - 2 - Configure SCE With I-O and Loopsthillai312100% (2)
- Presentation On FT View (Day-2)Dokument18 SeitenPresentation On FT View (Day-2)Nirupam BanerjeeNoch keine Bewertungen
- Presentacion M580Dokument25 SeitenPresentacion M580RegionSur MusaGrillNoch keine Bewertungen
- HMI - WinCC FlexibleDokument1 SeiteHMI - WinCC FlexiblepfalencarNoch keine Bewertungen
- Centum VP Engineering Outline Rev 1.1 PDFDokument2 SeitenCentum VP Engineering Outline Rev 1.1 PDFrayzo2182Noch keine Bewertungen
- Timer SimaticDokument16 SeitenTimer Simaticeman sulaemanNoch keine Bewertungen
- Section 10 Humans in ControlDokument64 SeitenSection 10 Humans in ControlAhmed FaragNoch keine Bewertungen
- SIMATIC PCS 7 Cabinet Design: 6/2 6/2 6/3 Basic Cabinet 6/4 ET 200M I/O Unit 6/5 System UnitDokument6 SeitenSIMATIC PCS 7 Cabinet Design: 6/2 6/2 6/3 Basic Cabinet 6/4 ET 200M I/O Unit 6/5 System UnitadelswedenNoch keine Bewertungen
- BRO DeltaV SIS System OverviewDokument20 SeitenBRO DeltaV SIS System Overviewelio_hbNoch keine Bewertungen
- Basic InstrumentationDokument29 SeitenBasic InstrumentationDineshKumarNoch keine Bewertungen
- Brochure Simatic-Step7 Tia-Portal enDokument24 SeitenBrochure Simatic-Step7 Tia-Portal endavidwang8512Noch keine Bewertungen
- CENTUM VP Documents - Yokogawa Electric CorporationDokument1 SeiteCENTUM VP Documents - Yokogawa Electric CorporationDhirender DagarNoch keine Bewertungen
- Wonderware Read and Write ExcelDokument22 SeitenWonderware Read and Write ExcelZha IezaNoch keine Bewertungen
- Pcs 7 v81 Mobile Devices enDokument40 SeitenPcs 7 v81 Mobile Devices enRafael DavidNoch keine Bewertungen
- SCADA, OPC and Database SystemsDokument23 SeitenSCADA, OPC and Database SystemsJure RunjeNoch keine Bewertungen
- Training Kit PEK 408 EngDokument38 SeitenTraining Kit PEK 408 EngSyed Mohammad NaveedNoch keine Bewertungen
- SIMATIC IT Production Suite V6.6 PDFDokument23 SeitenSIMATIC IT Production Suite V6.6 PDFSandeepNoch keine Bewertungen
- Prosafe RsDokument4 SeitenProsafe RsAymanelorbanyNoch keine Bewertungen
- Høgskolen I Telemark: Bachelor I IngeniørfagDokument30 SeitenHøgskolen I Telemark: Bachelor I IngeniørfagAnonymous bvuCxCnQ9Noch keine Bewertungen
- 13 Brochure Course PCS7SYS CourseDokument4 Seiten13 Brochure Course PCS7SYS CoursepernetiNoch keine Bewertungen
- InTouch P1 Course Description PDFDokument4 SeitenInTouch P1 Course Description PDFiedmondNoch keine Bewertungen
- G120 Fieldbus FCT Man 0418 en-US PDFDokument244 SeitenG120 Fieldbus FCT Man 0418 en-US PDFWilson Barco MNoch keine Bewertungen
- Ba Bni PBS-502-101-Z001 e - 893355Dokument43 SeitenBa Bni PBS-502-101-Z001 e - 893355Mein Herz BrenntNoch keine Bewertungen
- ELOP II-NT Resource TypeDokument243 SeitenELOP II-NT Resource TypeAkoKhalediNoch keine Bewertungen
- Sinamics v20 Drive PDFDokument22 SeitenSinamics v20 Drive PDFRavindra AngalNoch keine Bewertungen
- Cimplicity SecureDeploymentGuide v2 PDFDokument70 SeitenCimplicity SecureDeploymentGuide v2 PDFMOHAMMADNoch keine Bewertungen
- RSLOGIX5000 Programming A Clear and Concise ReferenceVon EverandRSLOGIX5000 Programming A Clear and Concise ReferenceNoch keine Bewertungen
- Process Control and Industrial Automation Complete Self-Assessment GuideVon EverandProcess Control and Industrial Automation Complete Self-Assessment GuideNoch keine Bewertungen
- Archit GargDokument86 SeitenArchit GargHanut MathurNoch keine Bewertungen
- Programmable Logic Controllers and Ladder LogicDokument33 SeitenProgrammable Logic Controllers and Ladder LogicGary8100% (4)
- RadiologyDokument28 SeitenRadiologyHanut MathurNoch keine Bewertungen
- RadiologyDokument28 SeitenRadiologyHanut MathurNoch keine Bewertungen
- Annual Presentation 18 19 EILDokument41 SeitenAnnual Presentation 18 19 EILPartha Pratim GhoshNoch keine Bewertungen
- Generalised Ultimate Loads For Pile GroupsDokument22 SeitenGeneralised Ultimate Loads For Pile GroupsValerioNoch keine Bewertungen
- Put Them Into A Big Bowl. Serve The Salad in Small Bowls. Squeeze Some Lemon Juice. Cut The Fruits Into Small Pieces. Wash The Fruits. Mix The FruitsDokument2 SeitenPut Them Into A Big Bowl. Serve The Salad in Small Bowls. Squeeze Some Lemon Juice. Cut The Fruits Into Small Pieces. Wash The Fruits. Mix The FruitsNithya SweetieNoch keine Bewertungen
- Fabrication Daily Progress: No DescriptionDokument4 SeitenFabrication Daily Progress: No DescriptionAris PurniawanNoch keine Bewertungen
- Taewoo Kim Et Al. v. Jump TradingDokument44 SeitenTaewoo Kim Et Al. v. Jump TradingCrainsChicagoBusiness100% (1)
- Study of Bond Properties of Concrete Utilizing Fly Ash, Marble and Granite PowderDokument3 SeitenStudy of Bond Properties of Concrete Utilizing Fly Ash, Marble and Granite PowderLegaldevil LlabsNoch keine Bewertungen
- Ga-z68p-Ds3 v2.x eDokument104 SeitenGa-z68p-Ds3 v2.x ejohnsonlimNoch keine Bewertungen
- Cavitation in Francis PDFDokument373 SeitenCavitation in Francis PDFAlberto AliagaNoch keine Bewertungen
- Electrical System in AENDokument21 SeitenElectrical System in AENNilesh PatilNoch keine Bewertungen
- Course Specifications: Fire Investigation and Failure Analysis (E901313)Dokument2 SeitenCourse Specifications: Fire Investigation and Failure Analysis (E901313)danateoNoch keine Bewertungen
- Sip TrunkDokument288 SeitenSip TrunkSayaOtanashiNoch keine Bewertungen
- Grade 10 LP Thin LensDokument6 SeitenGrade 10 LP Thin LensBrena PearlNoch keine Bewertungen
- Fish Siomai RecipeDokument12 SeitenFish Siomai RecipeRhyz Mareschal DongonNoch keine Bewertungen
- Calculating Measures of Position Quartiles Deciles and Percentiles of Ungrouped DataDokument43 SeitenCalculating Measures of Position Quartiles Deciles and Percentiles of Ungrouped DataRea Ann ManaloNoch keine Bewertungen
- Spermatogenesis: An Overview: Rakesh Sharma and Ashok AgarwalDokument25 SeitenSpermatogenesis: An Overview: Rakesh Sharma and Ashok Agarwalumar umarNoch keine Bewertungen
- Multidimensional Scaling Groenen Velden 2004 PDFDokument14 SeitenMultidimensional Scaling Groenen Velden 2004 PDFjoséNoch keine Bewertungen
- Sci5 q3 Module3 NoanswerkeyDokument22 SeitenSci5 q3 Module3 NoanswerkeyRebishara CapobresNoch keine Bewertungen
- Festival Implementation PlanDokument5 SeitenFestival Implementation Planapi-318058589Noch keine Bewertungen
- Lesson Plan Cot1Dokument9 SeitenLesson Plan Cot1Paglinawan Al KimNoch keine Bewertungen
- Lesson Plan Outline - Rebounding - Perez - JoseDokument7 SeitenLesson Plan Outline - Rebounding - Perez - JoseJose PerezNoch keine Bewertungen
- Opening The Third EyeDokument13 SeitenOpening The Third EyekakamacgregorNoch keine Bewertungen
- Formula BookletDokument2 SeitenFormula BookletOm PatelNoch keine Bewertungen
- Plant Gardening AerationDokument4 SeitenPlant Gardening Aerationut.testbox7243Noch keine Bewertungen
- 10.ULABs Presentation Camiguin FinalDokument55 Seiten10.ULABs Presentation Camiguin FinalKaren Feyt MallariNoch keine Bewertungen
- Almutairy / Musa MR: Boarding PassDokument1 SeiteAlmutairy / Musa MR: Boarding PassMusaNoch keine Bewertungen
- Dimitris Achlioptas Ucsc Bsoe Baskin School of EngineeringDokument22 SeitenDimitris Achlioptas Ucsc Bsoe Baskin School of EngineeringUCSC Students100% (1)
- What Is An InfographicDokument4 SeitenWhat Is An InfographicAryaaaNoch keine Bewertungen
- The Accreditation Committee Cityland Development CorporationDokument5 SeitenThe Accreditation Committee Cityland Development Corporationthe apprenticeNoch keine Bewertungen
- Material List Summary-WaptechDokument5 SeitenMaterial List Summary-WaptechMarko AnticNoch keine Bewertungen