Das könnte Ihnen auch gefallen
- Do Not Give Up Your Favorite Sport For A Shoulder Dislocation !Von EverandDo Not Give Up Your Favorite Sport For A Shoulder Dislocation !Bewertung: 1 von 5 Sternen1/5 (1)
- Alongamento Estático X 3S - 2015Dokument7 SeitenAlongamento Estático X 3S - 2015RODRIGO OLIVEIRANoch keine Bewertungen
- RoboticsDokument29 SeitenRoboticsnorshadiaNoch keine Bewertungen
- A Novel Reconfigurable Ankle Rehabilitation Robot For Various ExercisesDokument32 SeitenA Novel Reconfigurable Ankle Rehabilitation Robot For Various ExercisesCristina MagdaNoch keine Bewertungen
- 1 s2.0 S0966636221001338 MainDokument7 Seiten1 s2.0 S0966636221001338 MainLiesapriyantiNoch keine Bewertungen
- Proefschrift KlaskevankammenDokument102 SeitenProefschrift Klaskevankammenxian karachiNoch keine Bewertungen
- Sms 13770Dokument29 SeitenSms 13770Peio KominoNoch keine Bewertungen
- Discobolul XIV 151 2018Dokument8 SeitenDiscobolul XIV 151 2018George AmuzaNoch keine Bewertungen
- Chest Expander Spring A Low Cost Home Physiotherapybased Exercise Rehabilitation After Total Hip ArthroplastyDokument11 SeitenChest Expander Spring A Low Cost Home Physiotherapybased Exercise Rehabilitation After Total Hip ArthroplastyAmar DahmaniNoch keine Bewertungen
- Ankle Rehabilitation RobotDokument10 SeitenAnkle Rehabilitation Robottyh88Noch keine Bewertungen
- Gastrocnemius Operating Length With Ankle Foot Orthoses in Cerebral PalsyDokument2 SeitenGastrocnemius Operating Length With Ankle Foot Orthoses in Cerebral PalsyAmr Mohamed GalalNoch keine Bewertungen
- Drop Foot and AfosDokument6 SeitenDrop Foot and AfosNena FebriantyNoch keine Bewertungen
- Efficacy of A Hybrid Assistive Limb in Post-Stroke Hemiplegic Patients: A Preliminary ReportDokument6 SeitenEfficacy of A Hybrid Assistive Limb in Post-Stroke Hemiplegic Patients: A Preliminary ReportJoão Pedro Lemos MoraisNoch keine Bewertungen
- An Adaptive Wearable Parallel Robot For The Treatment of Ankle Injuries 2014Dokument12 SeitenAn Adaptive Wearable Parallel Robot For The Treatment of Ankle Injuries 2014newkid2202100% (1)
- Walking Simulation Model of Lower Limb Exoskeleton Robot DesignDokument11 SeitenWalking Simulation Model of Lower Limb Exoskeleton Robot Designandersson benito herrera100% (1)
- Effects of Respiratory-Muscle Exercise On Spinal CurvatureDokument6 SeitenEffects of Respiratory-Muscle Exercise On Spinal CurvatureChrisNoch keine Bewertungen
- Biomechanics of Overground vs. Treadmill Walking in Healthy IndividualsDokument9 SeitenBiomechanics of Overground vs. Treadmill Walking in Healthy IndividualsAlvaroNoch keine Bewertungen
- 03 Applied Gait AssessmentDokument19 Seiten03 Applied Gait AssessmentNiyati RathodNoch keine Bewertungen
- Research Article: Pilot Study of A Powered Exoskeleton For Upper Limb Rehabilitation Based On The WheelchairDokument12 SeitenResearch Article: Pilot Study of A Powered Exoskeleton For Upper Limb Rehabilitation Based On The WheelchairCostinel BogheanuNoch keine Bewertungen
- Bioengineering 09 00272Dokument13 SeitenBioengineering 09 00272Jordi Cortizo MoleraNoch keine Bewertungen
- Review Report 2016 Rupert WearableDokument14 SeitenReview Report 2016 Rupert WearableindorgNoch keine Bewertungen
- Abb2017 9084725Dokument8 SeitenAbb2017 9084725Gonzalo GonzalesNoch keine Bewertungen
- Gait & Posture: Full Length ArticleDokument6 SeitenGait & Posture: Full Length ArticleMatias Santis OlivaresNoch keine Bewertungen
- Abstrak Journal of NeuroEngineering and Rehabilitation Vol.15Dokument3 SeitenAbstrak Journal of NeuroEngineering and Rehabilitation Vol.15rts.tiarahilda safitriNoch keine Bewertungen
- Agachamento Com Thera-Band e Ativação Dos MMI - Thera-Band Aumenta A Atividade - Foley 2017Dokument10 SeitenAgachamento Com Thera-Band e Ativação Dos MMI - Thera-Band Aumenta A Atividade - Foley 2017AlanMeloNoch keine Bewertungen
- SciDokument9 SeitenSciCathyCarltonNoch keine Bewertungen
- Jpts 26 855Dokument2 SeitenJpts 26 855Yoga MatiinuNoch keine Bewertungen
- Desarrollo y Prueba Clínica Del Sistema de Entrenamiento de Rehabilitación de Realidad Virtual para El Paciente Con Paso de Rodilla RígidoDokument1 SeiteDesarrollo y Prueba Clínica Del Sistema de Entrenamiento de Rehabilitación de Realidad Virtual para El Paciente Con Paso de Rodilla RígidoOscar MayorgaNoch keine Bewertungen
- Design and Control of A Lower Limb Exoskeleton For Robot-Assisted Gait TrainingDokument16 SeitenDesign and Control of A Lower Limb Exoskeleton For Robot-Assisted Gait TrainingYalçın SabihaNoch keine Bewertungen
- Effect of Retro and Forward Walking On QuadricepsDokument7 SeitenEffect of Retro and Forward Walking On QuadricepsRiskha Meylita PutryNoch keine Bewertungen
- A Modeling Approach To Compute Modification of Net Joint Forces Caused by Coping Movements in Obstetric Brachial Plexus PalsyDokument9 SeitenA Modeling Approach To Compute Modification of Net Joint Forces Caused by Coping Movements in Obstetric Brachial Plexus PalsychikaNoch keine Bewertungen
- Robot-Assisted Ankle Rehabilitation For The Treatment of Drop Foot: A Case StudyDokument5 SeitenRobot-Assisted Ankle Rehabilitation For The Treatment of Drop Foot: A Case StudyIhsanNoch keine Bewertungen
- Kang 2019Dokument8 SeitenKang 2019Diego Germano MartinsNoch keine Bewertungen
- Active Hip Orthosis For Assisting The Training ofDokument13 SeitenActive Hip Orthosis For Assisting The Training ofJawa AlhaffarNoch keine Bewertungen
- Effectiveness of Gluteus Maximus Strengthening On Gait in Patients With HemiparesisDokument6 SeitenEffectiveness of Gluteus Maximus Strengthening On Gait in Patients With HemiparesisMufidah AlhadarNoch keine Bewertungen
- Ankle and Knee Coupling in Patients With Spastic Diplegia Effects of Gastrocnemius-Soleus LengtheningDokument9 SeitenAnkle and Knee Coupling in Patients With Spastic Diplegia Effects of Gastrocnemius-Soleus Lengtheningyarianna2Noch keine Bewertungen
- Lokomat DescriptionDokument11 SeitenLokomat Descriptionnadinne7Noch keine Bewertungen
- Long Term Muscle ChangesDokument7 SeitenLong Term Muscle ChangesAmr Mohamed GalalNoch keine Bewertungen
- Patellofemoral Joint Force and Stress Between A Short and Long Step Forward LungeDokument10 SeitenPatellofemoral Joint Force and Stress Between A Short and Long Step Forward LungeRafael EscamillaNoch keine Bewertungen
- Two-Degree Adjustable Exoskeleton For Assistance of The Human Arm Using A Mechanical System of Fast Assembly and UpgradabilityDokument15 SeitenTwo-Degree Adjustable Exoskeleton For Assistance of The Human Arm Using A Mechanical System of Fast Assembly and UpgradabilityTYTNoch keine Bewertungen
- Icorr 2005 1501051Dokument4 SeitenIcorr 2005 1501051Amanuel TilayeNoch keine Bewertungen
- Total Shoulder Arthroplasty GuidelineDokument17 SeitenTotal Shoulder Arthroplasty GuidelineMaria Luísa MirandaNoch keine Bewertungen
- Biomechanics of Front and Back Squat Exercises: Home Search Collections Journals About Contact Us My IopscienceDokument9 SeitenBiomechanics of Front and Back Squat Exercises: Home Search Collections Journals About Contact Us My IopsciencealdoNoch keine Bewertungen
- The Immediate Effects of Lumbar Rotational Mobilization On Trunk Control and Gait Parameter in Patients With StrokeDokument7 SeitenThe Immediate Effects of Lumbar Rotational Mobilization On Trunk Control and Gait Parameter in Patients With Stroke林良駿Noch keine Bewertungen
- Analysis of The Gait Characteristics and Usability After Wearable Exoskeleton Robot Gait TrainingDokument10 SeitenAnalysis of The Gait Characteristics and Usability After Wearable Exoskeleton Robot Gait TrainingAnis AnwasNoch keine Bewertungen
- Elbow Rehabilitation - SpringerLinkDokument35 SeitenElbow Rehabilitation - SpringerLinkasdfNoch keine Bewertungen
- X Xdonghwan Park, XX X Xji-Hyun Lee, XX X Xtae-Woo Kang, XX and X Xheon-Seock Cynn, XXDokument9 SeitenX Xdonghwan Park, XX X Xji-Hyun Lee, XX X Xtae-Woo Kang, XX and X Xheon-Seock Cynn, XXRay HannaNoch keine Bewertungen
- Robotic Orthosis Lokomat A Rehabilitation and Research ToolDokument8 SeitenRobotic Orthosis Lokomat A Rehabilitation and Research ToolGabby RojasNoch keine Bewertungen
- Department: Sarhad Institute of Allied Health Sciences Program:DPT - BDokument5 SeitenDepartment: Sarhad Institute of Allied Health Sciences Program:DPT - BIjaz KhanNoch keine Bewertungen
- Biomechanics ReportDokument22 SeitenBiomechanics Reportpatengg100% (1)
- Brainsci 13 00612Dokument18 SeitenBrainsci 13 00612hani1986yeNoch keine Bewertungen
- A Soft Wearable Robotic Ankle-Foot-Orthosis For Post-Stroke PatientsDokument6 SeitenA Soft Wearable Robotic Ankle-Foot-Orthosis For Post-Stroke PatientsIsabella Garcia DiazNoch keine Bewertungen
- InTech-Lower Limb Wearable ExoskeletonDokument28 SeitenInTech-Lower Limb Wearable ExoskeletonJuan Guillermo Patiño VengoecheaNoch keine Bewertungen
- Comparing The Kinematics of Back Squats Performed With Different Heel ElevationsDokument7 SeitenComparing The Kinematics of Back Squats Performed With Different Heel ElevationsAlemarcoriNoch keine Bewertungen
- Ankle InkDokument4 SeitenAnkle InkNysm NydNoch keine Bewertungen
- Journal of Neuroengineering and RehabilitationDokument16 SeitenJournal of Neuroengineering and RehabilitationFikri DzakyNoch keine Bewertungen
- 26 - Jpts 2014 042Dokument4 Seiten26 - Jpts 2014 042Carla veraNoch keine Bewertungen
- Biomechanical Analysis of A BallerinaDokument4 SeitenBiomechanical Analysis of A BallerinaUrooba ZubairiNoch keine Bewertungen
- Artigolegpress 2022Dokument11 SeitenArtigolegpress 2022Lina M GarciaNoch keine Bewertungen
- 2017 Article 36Dokument12 Seiten2017 Article 36Nistara Singh ChawlaNoch keine Bewertungen
- A Robot For Gait Rehabilitation, Roberts-MIT TesisDokument221 SeitenA Robot For Gait Rehabilitation, Roberts-MIT TesisMarco Tulio FigueroaNoch keine Bewertungen
- Gait & Ambulation 2004Dokument29 SeitenGait & Ambulation 2004Marco Tulio FigueroaNoch keine Bewertungen
- The Importance of Gait Analysis in Incomplete Spinal Cord Injury Patients in Field of NeurorehabilitationDokument5 SeitenThe Importance of Gait Analysis in Incomplete Spinal Cord Injury Patients in Field of NeurorehabilitationMarco Tulio FigueroaNoch keine Bewertungen
- Gage JR 2001 An Update On The Treatment of Gait Problems in CPDokument10 SeitenGage JR 2001 An Update On The Treatment of Gait Problems in CPMarco Tulio FigueroaNoch keine Bewertungen
- Pilot Study On Following and Resisting Forces On The PelvisDokument6 SeitenPilot Study On Following and Resisting Forces On The PelvisMarco Tulio FigueroaNoch keine Bewertungen
- The Gross Motor Function Classification System For Cerebral PalsyDokument5 SeitenThe Gross Motor Function Classification System For Cerebral PalsyMarco Tulio FigueroaNoch keine Bewertungen
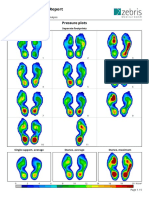
- Zebris Treadmill Gait Report: Pressure PlotsDokument5 SeitenZebris Treadmill Gait Report: Pressure PlotsAwatef FituriNoch keine Bewertungen
- Unit 2 Activity 1 QuizDokument1 SeiteUnit 2 Activity 1 QuizRoselyn IgartaNoch keine Bewertungen
- Baseline Gross MotorDokument4 SeitenBaseline Gross MotorPeter BarnettNoch keine Bewertungen
- Detailed Lesson PlanDokument4 SeitenDetailed Lesson PlanMa. ChrizelNoch keine Bewertungen
- Group 2 Proposed Botanical and Zoological GardenDokument45 SeitenGroup 2 Proposed Botanical and Zoological GardenBalogun IbrahimNoch keine Bewertungen
- Bony FishDokument13 SeitenBony Fishapi-326894086Noch keine Bewertungen
- Locomotor Poetry - KindergartenDokument5 SeitenLocomotor Poetry - KindergartenKaitlynJessicaNoch keine Bewertungen
- 40K DH2 CyberneticsDokument39 Seiten40K DH2 CyberneticsJohn100% (3)
- Body Movements and CardiorespiratoryDokument11 SeitenBody Movements and CardiorespiratoryRaymond LuberiaNoch keine Bewertungen
- Metamorphica ClassicDokument156 SeitenMetamorphica ClassicbobNoch keine Bewertungen
- The Musculoskeletal System of Humans Is Not Tuned To Maximize The Economy of LocomotionDokument6 SeitenThe Musculoskeletal System of Humans Is Not Tuned To Maximize The Economy of LocomotionRhirin JiehhNoch keine Bewertungen
- Chomview Open 2014 - All TEF Dressage TestsDokument10 SeitenChomview Open 2014 - All TEF Dressage TestsChalermcharn YotviriyapanitNoch keine Bewertungen
- Dance 365 - "Creative Dance Lesson Plan"Dokument12 SeitenDance 365 - "Creative Dance Lesson Plan"Kayla BagshawNoch keine Bewertungen
- P2 Ped 030 ReviewerDokument6 SeitenP2 Ped 030 ReviewerFrancis DeocaresNoch keine Bewertungen
- Dick, Sawicki 2021Dokument9 SeitenDick, Sawicki 2021Christos TheodorakisNoch keine Bewertungen
- Normal GaitDokument40 SeitenNormal GaitAastha chandankhedeNoch keine Bewertungen
- Planning The Physical Education Program Beed I3Dokument4 SeitenPlanning The Physical Education Program Beed I3Armanico ManuelNoch keine Bewertungen
- Biomechanics and Body MovementsDokument32 SeitenBiomechanics and Body Movementsgregjetomo12Noch keine Bewertungen
- Free Download Animal Locomotion C Oabs T Oxford Animal Biology 2Nd Edition Andrew Biewener Full Chapter PDFDokument51 SeitenFree Download Animal Locomotion C Oabs T Oxford Animal Biology 2Nd Edition Andrew Biewener Full Chapter PDFrobert.holbrook711100% (19)
- Biomechanics of GaitDokument27 SeitenBiomechanics of Gaitsebastiao_est3197Noch keine Bewertungen
- DominanceDokument40 SeitenDominanceNerella Tarakkrishna 16BCE0466Noch keine Bewertungen
- DocumentDokument4 SeitenDocumentSebastian Vincent Pulga PedrosaNoch keine Bewertungen
- Build Your Own Home Band Gym: Owners GuideDokument18 SeitenBuild Your Own Home Band Gym: Owners Guidehilbert_garlando1112Noch keine Bewertungen
- Locomotor Lesson PlanDokument3 SeitenLocomotor Lesson Planapi-311326994100% (1)
- An IntrouctionDokument29 SeitenAn Introuctionanjali chaudharyNoch keine Bewertungen
- Robotic Fish Design and Control Based On Biomechanics ?Dokument8 SeitenRobotic Fish Design and Control Based On Biomechanics ?Raunak GuptaNoch keine Bewertungen
- A Novel Robotic Meshworm With Segment-Bending Anchoring For ColonosDokument7 SeitenA Novel Robotic Meshworm With Segment-Bending Anchoring For ColonosNguyen SyNoch keine Bewertungen
- Companion Book - Gymnastics V 2 0 - 19 3 13Dokument88 SeitenCompanion Book - Gymnastics V 2 0 - 19 3 13api-317142467Noch keine Bewertungen
- Summative Assessment 1 MOVEMENT ANALYSIS: Locomotor and Non Locomotor MovementDokument2 SeitenSummative Assessment 1 MOVEMENT ANALYSIS: Locomotor and Non Locomotor MovementMark Shawen MI�ASNoch keine Bewertungen
- It Is Best To Start With The Lightest Weight You Can in Dumbbell Exercises. TrueDokument17 SeitenIt Is Best To Start With The Lightest Weight You Can in Dumbbell Exercises. TrueJayson Lucena100% (3)
- Relentless: From Good to Great to UnstoppableVon EverandRelentless: From Good to Great to UnstoppableBewertung: 5 von 5 Sternen5/5 (788)
- Power of 10: The Once-A-Week Slow Motion Fitness RevolutionVon EverandPower of 10: The Once-A-Week Slow Motion Fitness RevolutionBewertung: 3.5 von 5 Sternen3.5/5 (11)
- Functional Training and Beyond: Building the Ultimate Superfunctional Body and MindVon EverandFunctional Training and Beyond: Building the Ultimate Superfunctional Body and MindBewertung: 4.5 von 5 Sternen4.5/5 (1)
- Chair Yoga: Sit, Stretch, and Strengthen Your Way to a Happier, Healthier YouVon EverandChair Yoga: Sit, Stretch, and Strengthen Your Way to a Happier, Healthier YouBewertung: 3.5 von 5 Sternen3.5/5 (5)
- Aging Backwards: Reverse the Aging Process and Look 10 Years Younger in 30 Minutes a DayVon EverandAging Backwards: Reverse the Aging Process and Look 10 Years Younger in 30 Minutes a DayNoch keine Bewertungen
- Boundless: Upgrade Your Brain, Optimize Your Body & Defy AgingVon EverandBoundless: Upgrade Your Brain, Optimize Your Body & Defy AgingBewertung: 4.5 von 5 Sternen4.5/5 (67)
- Strong Is the New Beautiful: Embrace Your Natural Beauty, Eat Clean, and Harness Your PowerVon EverandStrong Is the New Beautiful: Embrace Your Natural Beauty, Eat Clean, and Harness Your PowerBewertung: 4 von 5 Sternen4/5 (5)
- Which Comes First, Cardio or Weights?: Fitness Myths, Training Truths, and Other Surprising Discoveries from the Science of ExerciseVon EverandWhich Comes First, Cardio or Weights?: Fitness Myths, Training Truths, and Other Surprising Discoveries from the Science of ExerciseBewertung: 4 von 5 Sternen4/5 (47)
- Strength Training Over 40: The Only Weight Training Workout Book You Will Need to Maintain or Build Your Strength, Muscle Mass, Energy, Overall Fitness and Stay Healthy Without Living in the GymVon EverandStrength Training Over 40: The Only Weight Training Workout Book You Will Need to Maintain or Build Your Strength, Muscle Mass, Energy, Overall Fitness and Stay Healthy Without Living in the GymBewertung: 4 von 5 Sternen4/5 (6)
- Pranayama: The Yoga Science of BreathingVon EverandPranayama: The Yoga Science of BreathingBewertung: 4.5 von 5 Sternen4.5/5 (8)
- Own the Day, Own Your Life: Optimized Practices for Waking, Working, Learning, Eating, Training, Playing, Sleeping, and SexVon EverandOwn the Day, Own Your Life: Optimized Practices for Waking, Working, Learning, Eating, Training, Playing, Sleeping, and SexBewertung: 4.5 von 5 Sternen4.5/5 (646)
- Peak: The New Science of Athletic Performance That is Revolutionizing SportsVon EverandPeak: The New Science of Athletic Performance That is Revolutionizing SportsBewertung: 5 von 5 Sternen5/5 (97)
- The Yogi Code: Seven Universal Laws of Infinite SuccessVon EverandThe Yogi Code: Seven Universal Laws of Infinite SuccessBewertung: 4.5 von 5 Sternen4.5/5 (104)
- Calisthenics: Guide for Bodyweight Exercise, Build your Dream Body in 30 MinutesVon EverandCalisthenics: Guide for Bodyweight Exercise, Build your Dream Body in 30 MinutesBewertung: 3 von 5 Sternen3/5 (5)
- True Yoga: Practicing With the Yoga Sutras for Happiness & Spiritual FulfillmentVon EverandTrue Yoga: Practicing With the Yoga Sutras for Happiness & Spiritual FulfillmentBewertung: 4.5 von 5 Sternen4.5/5 (22)
- Light on Yoga: The Definitive Guide to Yoga PracticeVon EverandLight on Yoga: The Definitive Guide to Yoga PracticeBewertung: 5 von 5 Sternen5/5 (1)
- Somatic Exercises for Beginners: Transform Your Life in 30 Days with Personalized Exercises for Body and MindVon EverandSomatic Exercises for Beginners: Transform Your Life in 30 Days with Personalized Exercises for Body and MindNoch keine Bewertungen
- Muscle for Life: Get Lean, Strong, and Healthy at Any Age!Von EverandMuscle for Life: Get Lean, Strong, and Healthy at Any Age!Bewertung: 4.5 von 5 Sternen4.5/5 (22)
- Roxane Gay & Everand Originals: Built for This: The Quiet Strength of PowerliftingVon EverandRoxane Gay & Everand Originals: Built for This: The Quiet Strength of PowerliftingBewertung: 4.5 von 5 Sternen4.5/5 (133)
- Not a Diet Book: Take Control. Gain Confidence. Change Your Life.Von EverandNot a Diet Book: Take Control. Gain Confidence. Change Your Life.Bewertung: 3.5 von 5 Sternen3.5/5 (7)
- Yoga Nidra: The Art of Transformational SleepVon EverandYoga Nidra: The Art of Transformational SleepBewertung: 4.5 von 5 Sternen4.5/5 (24)
- Yin Yoga: How to Enhance Your Modern Yoga Practice With Yin Yoga to Achieve an Optimal Mind-Body Connection: Yoga Mastery SeriesVon EverandYin Yoga: How to Enhance Your Modern Yoga Practice With Yin Yoga to Achieve an Optimal Mind-Body Connection: Yoga Mastery SeriesNoch keine Bewertungen
- Wheels of Life: A User's Guide to the Chakra SystemVon EverandWheels of Life: A User's Guide to the Chakra SystemBewertung: 4.5 von 5 Sternen4.5/5 (34)
- The Big Book of Endurance Training and RacingVon EverandThe Big Book of Endurance Training and RacingBewertung: 5 von 5 Sternen5/5 (6)
- Mind Your Body: 4 Weeks to a Leaner, Healthier LifeVon EverandMind Your Body: 4 Weeks to a Leaner, Healthier LifeBewertung: 4.5 von 5 Sternen4.5/5 (5)
- Enter The Kettlebell!: Strength Secret of the Soviet SupermenVon EverandEnter The Kettlebell!: Strength Secret of the Soviet SupermenBewertung: 4 von 5 Sternen4/5 (29)
- Yamas & Niyamas: Exploring Yoga's Ethical PracticeVon EverandYamas & Niyamas: Exploring Yoga's Ethical PracticeBewertung: 4.5 von 5 Sternen4.5/5 (111)