Das könnte Ihnen auch gefallen
- List of Good Chess BooksDokument1 SeiteList of Good Chess BooksJustin JenningsNoch keine Bewertungen
- FPGA Xilin XcellDokument68 SeitenFPGA Xilin XcellJustin JenningsNoch keine Bewertungen
- BLDC SensorDokument10 SeitenBLDC SensorAnonymous zphkK79KxmNoch keine Bewertungen
- Chess Good BookDokument2 SeitenChess Good BookJustin JenningsNoch keine Bewertungen
- Implementation Option of Optimizing For SpeedDokument3 SeitenImplementation Option of Optimizing For SpeedJustin JenningsNoch keine Bewertungen
- BLDC BasicsDokument4 SeitenBLDC BasicsJustin JenningsNoch keine Bewertungen
- 409 RaisDokument5 Seiten409 RaisSwiss WissNoch keine Bewertungen
- Permanent Magnet Brushless DC Motor Drives and ControlsDokument8 SeitenPermanent Magnet Brushless DC Motor Drives and ControlsJustin JenningsNoch keine Bewertungen
- Reluctance Motor - Ac MotorsDokument4 SeitenReluctance Motor - Ac MotorsJustin JenningsNoch keine Bewertungen
- AutoCAD Tutorial 002 PDFDokument54 SeitenAutoCAD Tutorial 002 PDFskannanmecNoch keine Bewertungen
- Seminar Im ThermalDokument33 SeitenSeminar Im ThermalJustin JenningsNoch keine Bewertungen
- Seminar Presentation BLDCDokument27 SeitenSeminar Presentation BLDCJustin Jennings100% (1)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Sect. 3.3 Construction of Equivalent Circuit ModelDokument8 SeitenSect. 3.3 Construction of Equivalent Circuit ModelPiero TorpocoNoch keine Bewertungen
- Samsung FX2490HDDokument50 SeitenSamsung FX2490HDLuiz Roberto Honório Alves FilhoNoch keine Bewertungen
- 3 EC IES 2011 Conventional Paper IDokument6 Seiten3 EC IES 2011 Conventional Paper IBodhisatwa ChowdhuryNoch keine Bewertungen
- Review of Related LiteratureDokument4 SeitenReview of Related LiteratureMaria Blessie Navarrete100% (1)
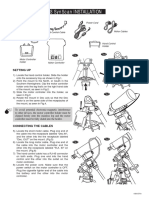
- EQ3 SynScan INSTALLATION guideDokument1 SeiteEQ3 SynScan INSTALLATION guideOscar MalamudNoch keine Bewertungen
- Sheet 3: DC and Synchronous MachinesDokument8 SeitenSheet 3: DC and Synchronous MachinesMohammed Montaser50% (2)
- FBP-10 Fbpi-10 FBP-15 Fbpi-15 FBP-20 Fbpi-20 FBP-25 Fbpi-25 FBP-30 Fbpi-30Dokument2 SeitenFBP-10 Fbpi-10 FBP-15 Fbpi-15 FBP-20 Fbpi-20 FBP-25 Fbpi-25 FBP-30 Fbpi-30Edison MendozaNoch keine Bewertungen
- 126 UpdatedDokument112 Seiten126 UpdatednumantariqNoch keine Bewertungen
- FKJ BI HK20 Computer EngineeringDokument5 SeitenFKJ BI HK20 Computer EngineeringMarcopolo GohNoch keine Bewertungen
- Peripheral Series: Frequency Measurement CardDokument2 SeitenPeripheral Series: Frequency Measurement CardSohail ANoch keine Bewertungen
- FORM TP 22247: Caribbean Examinat Advanced Proficiency Physics Ions Coun ExaminationDokument19 SeitenFORM TP 22247: Caribbean Examinat Advanced Proficiency Physics Ions Coun Examinationpetey78Noch keine Bewertungen
- VF-DRIVE-rope-units GAA622AA CSU FD 001Dokument16 SeitenVF-DRIVE-rope-units GAA622AA CSU FD 001Coil98Noch keine Bewertungen
- Over Moulded Wire Harnesses With Fuse 1500Dokument1 SeiteOver Moulded Wire Harnesses With Fuse 1500SEO BDMNoch keine Bewertungen
- 3.3 Subtractive Synthesis: 3.3.1 Theory: Source and Modifi ErDokument15 Seiten3.3 Subtractive Synthesis: 3.3.1 Theory: Source and Modifi ErMafeCastro1998100% (1)
- Power Allocation for NOMA System with Statistical CSIDokument43 SeitenPower Allocation for NOMA System with Statistical CSIhendra lamNoch keine Bewertungen
- Maxon EC20 Flat 3wattDokument1 SeiteMaxon EC20 Flat 3wattElectromateNoch keine Bewertungen
- Rockwell Collins 400 Collins Road NE Cedar Rapids, IA 52498 319.295.1000Dokument190 SeitenRockwell Collins 400 Collins Road NE Cedar Rapids, IA 52498 319.295.1000Carlos Silva100% (1)
- Product Sheet: Nibp100D Noninvasive Blood Pressure Monitoring SystemDokument3 SeitenProduct Sheet: Nibp100D Noninvasive Blood Pressure Monitoring SystemSadegh ShebaniNoch keine Bewertungen
- ProWORX32+V2 1+SP2+ReadMeEng PDFDokument12 SeitenProWORX32+V2 1+SP2+ReadMeEng PDFRuben LoveraNoch keine Bewertungen
- QM RMCDokument3 SeitenQM RMCfaruk604Noch keine Bewertungen
- Method Statement for Fire Protection Services InstallationDokument45 SeitenMethod Statement for Fire Protection Services InstallationMuhammad Farezon82% (11)
- Samsung proprietary board information and power sequence timingDokument2 SeitenSamsung proprietary board information and power sequence timingHumberto AndujarNoch keine Bewertungen
- Engineering Measurements 2Dokument3 SeitenEngineering Measurements 2KCCNoch keine Bewertungen
- Basics of SAW Sensor TechnologyDokument5 SeitenBasics of SAW Sensor TechnologyManmohan HarilalNoch keine Bewertungen
- Vs 101 VectorDokument2 SeitenVs 101 VectorNguyen Phuoc HoNoch keine Bewertungen
- EPSON SureColor P Series Brochure-Sticker PDFDokument6 SeitenEPSON SureColor P Series Brochure-Sticker PDFAnonymous WD109UakyNoch keine Bewertungen
- Operating Systems From 0 To 1 PDFDokument311 SeitenOperating Systems From 0 To 1 PDF3charlie52Noch keine Bewertungen
- Quiz LetDokument5 SeitenQuiz LetFarihah FazimNoch keine Bewertungen
- Cable PullingDokument15 SeitenCable PullingComstar SupplyNoch keine Bewertungen
- Questions 6Dokument3 SeitenQuestions 6Bobeth TubigNoch keine Bewertungen