Beruflich Dokumente
Kultur Dokumente
Tarea5 PDF
Hochgeladen von
Jorge Andrés Castro RillingOriginalbeschreibung:
Originaltitel
Copyright
Verfügbare Formate
Dieses Dokument teilen
Dokument teilen oder einbetten
Stufen Sie dieses Dokument als nützlich ein?
Sind diese Inhalte unangemessen?
Dieses Dokument meldenCopyright:
Verfügbare Formate
Tarea5 PDF
Hochgeladen von
Jorge Andrés Castro RillingCopyright:
Verfügbare Formate
Fundamentos de mquinas elctricas y
servosistemas (547249)
Tarea 5
Nombre: Jorge Andrs Castro Rilling
Carrera: Ingeniera Civil Electrnica
Profesor: Manuel Anibal Valenzuela Latorre
Fecha Entrega: 26/06/2014
CONTROL DE POSICIN USANDO SERVOMOTORES
Se requiere sintetizar y evaluar el servosistema que mueve uno de los ejes de la mesa de trabajo de
una mquina herramienta que confecciona piezas de alta precisin. El ciclo bsico de operacin
corresponde a una trayectoria trapezoidal de velocidad entre una posicin inicial y final dada.
El procedimiento a utilizar corresponde al denominado ajuste por zonas y consistir en ajustar los
lazos del ms rpido al ms lento y, dentro de cada lazo, ajustar primero la accin proporcional (P, ms
rpida), luego la integrativa (I, ms lenta). Se debern obtener los grficos de las respuestas del
servosistema durante cada etapa del procedimiento seguido.
Las caractersticas tcnicas y parmetros de los elementos se entregan en Hoja de Datos Tcnicos
siguiente:
Servomotor Conversor
Carga Mecnica
Se pide:
I.- SNTESIS DE LAZOS DE CONTROL
El lazo de corriente se asume ideal y solo requieren sintonizarse los lazos de velocidad y posicin.
1.1. Sntesis controlador de velocidad:
Siguiendo mtodo de ajuste por zonas, determinar los valores de las ganancias
del
controlador PI de velocidad. En particular:
i). Ajuste Ganancia
. Desarrollar simulacin para el ajuste de la ganancia
en modo de control
de velocidad (P_PI_gan_kvp_xxx.m/mdl), con la componente integrativa del controlador nula
(
). Aplicar onda cuadrada de 10% de
y obtener respuesta del lazo para distintas
ganancias
. Hacer grficos de
(subplot 1) y de
(subplot 2) para 3 valores
caractersticos de
: Bajo, Correcto y Alto (total: 3 grficos con 2 subplots cada uno, llenando 3
pginas).
ii). Ajuste Ganancia
. Desarrollar simulacin para el ajuste de la ganancia
en modo de control de
velocidad (P_PI_gan_kvi_xxx.m/mdl), con la componente proporcional del controlador
ajustada al valor Correcto encontrado en i). Aplicar onda cuadrada de 10% de
y obtener
respuesta del lazo para distintas ganancias
. Hacer grficos de
(subplot 1) y
de
(subplot 2) para 3 valores caractersticos de
: Bajo, Correcto y Alto (total: 3 grficos
con 2 subplots cada uno, llenando 3 pginas).
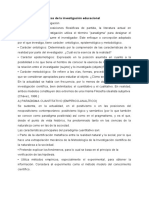
Para la sintonizacin del lazo de velocidad se utiliza el siguiente diagrama de control:
Donde la ganancia igual a 1 corresponde al lazo de corriente que se considera ideal para esta
sintonizacin, para sintonizar este lazo se le aplica una seal cuadrada de 10% de
al sistema,
usando valores aleatorios de
, mientras que
se mantiene como 0, una vez se encuentra una
respuesta adecuada, se elige el
que gener esta respuesta, y se procede a hacer el mismo proceso
para
.
De esta forma, con un
igual a 0.2 se obtiene la siguiente respuesta:
Esta respuesta corresponde a un
considerado como bajo.
Por otro lado, con un
igual a 0.6 se obtiene la siguiente respuesta:
Esta respuesta corresponde a un
considerado como correcto. Se puede ver como el salto de
corriente es grande, pero no alcanza valores prohibitivos, puesto que no superan las 4 veces la corriente
nominal del motor.
Mientras que, con un
igual a 2 se obtiene la siguiente respuesta:
Esta respuesta corresponde a un
considerado como alto. Se puede ver como la corriente aumenta a
valores an ms prohibitivos que los obtenidos con
correcto, por esta razn, valores de
muy
altos no son permitidos.
Finalmente se elige el valor de
correcto, igual a 0.6.
Ahora se procede a obtener un valor de
de la misma forma, para esto, se eligen valores de
al
azar con tal de conseguir un de sobrepaso, para esto se tiene:
Donde corresponde a la diferencia entre el valor mximo de la salida y
, entonces se tiene:
Por lo tanto, el valor mximo de la velocidad debe ser igual a
Luego, probando con un
igual a 2.5 se obtiene la siguiente respuesta:
Se puede apreciar un efecto mnimo de la parte integrativa, y el valor mximo de la velocidad es de
, por lo tanto, este valor es considerado como bajo.
Por otro lado, con un
igual a 14 se obtiene la siguiente respuesta:
En este caso, es ms notorio el efecto de la parte integrativa en la respuesta, adems se obtiene un valor
mximo en la velocidad de , lo que equivale a un de sobrepaso, por lo tanto este
valor de
es considerado como correcto.
Mientras que, con un
igual a 30 se obtiene la siguiente respuesta:
En este caso, el efecto de la parte integrativa en la respuesta es excesivo y se empieza a notar tambin
en la corriente, adems, se tiene un valor mximo de la velocidad de lo que es igual a un
sobrepaso mayor a , por lo tanto, este valor de
es considerado como alto.
Finalmente, se elige el valor de
igual a 7.5, el cual es considerado como correcto.
1.2. Sntesis Controlador de Posicin
i) Ajuste Ganancia
. Desarrollar simulacin para el ajuste de la ganancia
en modo de control
de posicin (P_PI_gan_kp_xxx.m/mdl) y utilizar los valores de
encontrados en puntos
anteriores. Generar referencia de posicin correspondiente a las mximas rampas de aceleracin y
desaceleracin requeridas (ver Hoja de Datos adjunta). Aplicar referencia desarrollada y obtener
respuesta del servosistema para distintas ganancias
. Hacer grficos de
(subplot
1),
(subplot 2) y de
(subplot 3) para 3 valores caractersticos de
: Bajo,
Correcto y Alto (total: 3 grficos con 3 subplots cada uno, llenando 3 pginas).
Para la sintonizacin del lazo de posicin se utiliza el siguiente diagrama de control:
Para encontrar la ganancia proporcional
del controlador de posicin se debe generar una referencia
trapezoidal de velocidad y elegir el
para que la corriente no supere el valor de
asumiendo
torques de friccin y carga nulos, de esta forma, para encontrar la pendiente de aceleracin y
desaceleracin tal que se cumpla esta condicin, se tiene la ecuacin
Anulando los torques de friccin y nulos en la ecuacin anterior se tiene:
Como esta pendiente encontrada es asumida con torques de friccin y carga nulos (los cuales haran
aumentar la corriente), se elige una pendiente un poco menor para sintonizar el controlador, en este
caso, de
Luego, para generar la seal trapezoidal se calcula el tiempo en que se manifiesta la rampa de subida
hasta alcanzar el valor mximo, que en este caso es
, de esta forma se tiene:
Lo que es equivalente a:
Para efectos de sintonizar el controlador se trabajar con reas iguales de aceleracin, desaceleracin y
operacin.
Luego, se procede a probar con valores aleatorios de
hasta justo antes que la respuesta muestre
sobrepaso, obteniendo, con un
igual a 5 la siguiente respuesta:
Se puede ver como no es alcanzada ni la referencia de posicin ni la de velocidad, por lo tanto este valor
de
es considerado bajo.
Por otro lado, se puede ver que la corriente alcanza como mximo el valor para el cual se calcul la
pendiente de aceleracin y desaceleracin, por lo tanto este valor de
es considerado bajo.
Probando con un valor de
igual a 50 se tiene:
Se puede ver como con este valor de
tanto la velocidad como la posicin siguen casi perfectamente
sus respectivas referencias, adems la corriente empieza a responder manera que tiene un pequeo
sobrepaso al valor mximo que dura un par de segundos, este sobrepaso resulta insignificante, por lo
tanto es un valor considerado correcto.
Por otro lado, se puede notar que la corriente toma una forma similar a la de un sistema de segundo
orden, por lo que se puede inferir que aumentando el valor de
la corriente comenzar a
comportarse de forma oscilatoria.
Por otro lado, con un
igual a 300 se obtiene:
Se puede ver como a este valor, las respuestas siguen siguiendo perfectamente sus respectivas
referencias, pero como era de esperarse, la corriente toma una forma oscilatoria, lo cual no es bueno
para el servomotor, por lo tanto este valor es considerado como alto.
En conclusin se procede a elegir un
igual a 50, el cual fue el
considerado como correcto.
II.- EVALUACIN SISTEMA
2.1. Ciclo Trapezoidal
El servosistema debe trasladar una carga desde una posicin inicial definida por a una
posicin final
. Desarrollar simulacin en Matlab o Simulink que permita evaluar la respuesta del
sistema para una referencia de posicin que genere un ciclo trapezoidal de velocidad. Esta simulacin
deber permitir obtener los grficos de las siguientes variables (caso Simulink: guardar variables en
workpace)
-
- Potencia y energa de prdidas (
)
i). El servosistema debe mover la carga desde la posicin inicial
hasta una posicin final
, siguiendo una referencia trapezoidal. La mxima velocidad en este ciclo es
de . La tasa de aceleracin se ajusta para no sobrepasar
en la partida
asumiendo torque de carga y friccin nulas. Calcular la referencia trapezoidal para el
desplazamiento entre la posicin inicial y final (determinar tiempos de aceleracin, operacin a
velocidad constante, desaceleracin y el tiempo de ciclo
)
En la parte 1.2 se desarroll parte de la referencia trapezoidal que es necesaria ahora, se calcul que se
debe tener una pendiente de aceleracin/desaceleracin menor o igual a
y se eligi
finalmente una pendiente de
.
Para completar el desarrollo de esta referencia trapezoidal, se deben calcular los tiempos de operacin,
velocidad constante y desaceleracin.
Para calcular el tiempo de aceleracin tenemos la ecuacin:
Donde es la pendiente calculada anteriormente,
(tiempo de aceleracin)
As, con
se tiene:
Por otro lado, para encontrar la posicin alcanzada al terminar la rampa de velocidad se utiliza la
ecuacin de posicin del movimiento circunferencial uniforme dada por:
Donde corresponde a la aceleracin angular, la cual es la derivada de la velocidad angular, que
equivale a la pendiente calculada previamente, por otro lado, tenemos que
es 0 en este caso.
De esta forma:
Luego se tiene:
Donde
son los cambios de posicin realizados en la parte de operacin, aceleracin y
desaceleracin respectivamente.
Por simpleza, la rampa etapa de desaceleracin tendr la misma pendiente y durar lo mismo, por lo
tanto:
, as:
Por otro lado, por la ecuacin de posicin de movimiento circunferencial uniforme:
Lo que es equivalente a:
Que es el tiempo de operacin.
Finalmente el tiempo de ciclo puede obtenerse como:
ii). Obtener la respuesta del sistema siguiendo la referencia trapezoidal calculada en i). Graficar las
siguientes variables:
Grfico 1:
- Sub-plot 1 :
- Sub-plot 2:
- Sub-plot 3:
Grfico 2:
- Sub-plot 1:
- Sub-plot 2:
- Sub-plot 3:
Mostrar grficos desde algunos instantes antes de la aplicacin de la referencia de modo de
apreciar la excursin de las seales en el instante del inicio del ciclo. Incluir reticulado y ttulos en
los ejes.
Al simular el sistema se consiguen los siguientes grficos:
iii). Comentar
Se puede ver como la posicin sigue su referencia de forma prcticamente perfecta, al igual que
la velocidad, por otro lado, se puede ver como en el momento de la rampa de velocidad la corriente
tiene un salto, puesto que esta es dependiente de la variacin de la velocidad, se puede ver como el
salto de corriente es ligeramente mayor a la corriente mxima, pero por un momento muy corto, por lo
tanto no supone mayor peligro al servosistema, por otro lado, se puede ver como la potencia disipada
tambin tiene una variacin importante cuando existe la rampa de velocidad, esto ocurre ya que la
potencia es dependiente de la corriente, con estas tres condiciones cumplidas, se puede afirmar que la
sintonizacin de los lazos fue correcta, por otro lado, la energa disipada al ser la integral de la potencia
con respecto al tiempo, se ve que va aumentando en funcin de este ltimo hasta alcanzar un valor
aproximado de
2.2. Respuesta escaln
Evaluar respuesta del servosistema cuando se impone una referencia escaln en lugar de una
trayectoria con perfil de velocidad trapezoidal. Para ello incorporar al modelo del sistema limitadores de
la corriente a la salida de controlador de velocidad de modo de limitar la corriente a 4 veces la corriente
nominal y aplicar una referencia escaln de posicin igual al punto anterior (f = 3.600 [vtas]). Graficar
las siguientes variables:
-
- Potencia y energa de prdidas (
)
Mostrar grficos desde algunos instantes antes de la aplicacin de la referencia de modo de apreciar la
excursin de las seales en el instante del inicio del ciclo. Incluir reticulado y ttulos en los ejes.
Al simular bajo estas condiciones se obtiene:
iv).- Comparar con resultados de evaluacin anterior. Comentar
Se puede ver que gracias al limitador de corriente el servosistema se descontrola
completamente, donde la velocidad toma valores muy altos, y la posicin oscila de una forma que nunca
alcanza la referencia deseada, por otro lado, existe una mayor disipacin de potencia y de energa ya que
la corriente se mueve en forma de escalones, entre los valores mximo y mnimo.
Por otro lado, si el limitador de corriente no existiera, el sistema alcanzara rpidamente la
posicin final deseada, pero esto a cambio de que la velocidad tienda a infinito al igual que la corriente,
cosa que quemara el motor en cuestin de segundos.
De esto se puede concluir que a un servomotor no se le puede aplicar una referencia de posicin
de tipo escaln en ningn caso, puesto que si existe limitador de corriente, este har que el servosistema
se haga inestable, mientras que si este no existe, el motor se quemar enseguida, aqu es donde radica la
importancia de las referencias de velocidad para el control de posicin con servomotores.
III.- ANEXO: CDIGO MATLAB
%% Fundamentos de mquinas elctricas y servosistemas Tarea 5
clc; clear all; close all;
% Parmetros motor:
Mnom = 1.75; %[Nm]
Kt = 0.68362; %[Nm/A]
Inom = 2.7; %[A]
Ra = 6.49; %[Ohm]
Jm = 0.00093; %[kg*m^3]
Vnom = 160.7; %[V]
La = 19.1e-3; %[mH]
Ta = La/Ra;
D = 4.57777e-4; %[Nm/(rad/s)]
Nnom = 2000; %[rpm]
Wnom = Nnom*(pi/30);
Nmax = 1800;
Wmax = Nmax*(pi/30);
Thetamax = 3600*(2*pi);
Ke = (Vnom - Ra*Inom)/Wnom;
% Parmetros conversor:
Vcnom = 200; %[V]
Icnom = 15; %[A]
Kc = 20;
Icmax = 4*Icnom;
% Parmetros carga:
Jl = 7.44e-3; %[kg*m^2]
% Parmetros controlador:
Kvp = 0.6;
Kvi = 14;
Kpp = 50;
% Parnetros generales:
J = Jm+Jl;
% tmax = 0.698*3+(1-0.698)*2; %Para sintonizar posicin
top = 118.1142;
ta = 0.6283;
tmax = top + 2*ta+4;
t0 = 0.002;
t = 0:t0:tmax;
%% Grficos sintonizacin velocidad
subplot(2,1,1);
plot (t-1.30,Wref,t-1.30,W,t-1.30,Wnom,':','LineWidth',2.2);
grid on;
xlim ([0 tmax-1.30]);
ylim ([min(Wref)-20 max(Wref)+20]);
subplot(2,1,2);
plot (t-1.30,Ia,t-1.30,Inom,'--','LineWidth',2.2);
grid on;
xlim ([0 tmax-1.30]);
ylim ([min(Ia)-2 max(Ia(15:length(Ia)))+2]);
%% Grficos sintonizacin posicin
subplot(3,1,1);
plot (t,thetaref/(2*pi),t,theta/(2*pi),'LineWidth',2.2);
grid on;
title('Posicin [Vueltas]');
xlim ([0 tmax]);
ylim ([min(thetaref)/(2*pi)-15 max(thetaref)/(2*pi)+15]);
subplot(3,1,2);
plot (t,Wref,t,W,t,Wnom,':','LineWidth',2.2);
grid on;
title('Velocidad [rad/s]');
xlim ([0 tmax]);
ylim ([min(Wref)-20 max(Wref)+20]);
subplot(3,1,3);
plot (t,Ia,t,1.5*Inom,'LineWidth',2.2);
grid on;
title('Corriente [A]');
xlim ([0 tmax]);
ylim ([min(Ia)-2 max(Ia(15:length(Ia)))+2]);
figure(2);
plot (t,Wref-W,'LineWidth',2.2);
%% Simulacin Servosistema
subplot(3,1,1);
plot (t,thetaref/(2*pi),t,theta/(2*pi),'LineWidth',2.2);
grid on;
title('Posicin [Vueltas]');
xlabel ('Tiempo [s]');
ylabel('Posicin [Vueltas]');
xlim ([0 tmax]);
ylim ([min(thetaref)/(2*pi)-200 max(thetaref)/(2*pi)+200]);
subplot(3,1,2);
plot (t,theta/(2*pi),'LineWidth',2.2);
grid on;
title('Posicin [Vueltas]');
xlabel ('Tiempo [s]');
ylabel('Posicin [Vueltas]');
xlim ([0 tmax]);
ylim ([min(theta)/(2*pi)-200 max(theta)/(2*pi)+200]);
subplot(3,1,3);
plot (t,W*(30/pi),t,Wnom*(30/pi),':','LineWidth',2.2);
grid on;
title('Velocidad [RPM]');
xlabel ('Tiempo [s]');
ylabel('Velocidad [RPM]');
xlim ([0 tmax]);
ylim ([min(W*(30/pi))-200 max(W*(30/pi))+200]);
figure(2);
subplot(3,1,1);
plot (t,Ia,t,1.5*Inom,'LineWidth',2.2);
grid on;
title('Corriente [A]');
xlabel ('Tiempo [s]');
ylabel('Corriente [A]');
xlim ([0 tmax]);
ylim ([min(Ia)-2 max(Ia(15:length(Ia)))+2]);
subplot(3,1,2);
plot (t,P,'LineWidth',2.2);
grid on;
title('Potencia disipada [W]');
xlabel ('Tiempo [s]');
ylabel('Potencia disipada [W]');
xlim ([0 tmax]);
ylim ([min(P)-2 max(P(15:length(P)))+2]);
subplot(3,1,3);
plot (t,E,'LineWidth',2.2);
grid on;
title('Energa disipada [J]');
xlabel ('Tiempo [s]');
ylabel('Energa disipada [J]');
xlim ([0 tmax]);
ylim ([min(E)-200 max(E(15:length(E)))+200]);
III.- ANEXO: DIAGRAMAS SIMULINK
Para la sintonizacin del lazo de velocidad se us:
Para la sintonizacin del lazo de posicin se us:
Para la evaluacin del sistema con referencia trapezoidal de velocidad se us:
Para la evaluacin del sistema con referencia escaln de posicin se us:
Das könnte Ihnen auch gefallen
- Indautor e ImpiDokument51 SeitenIndautor e ImpiJonathan ThomeNoch keine Bewertungen
- Test PsicopedagogicosDokument41 SeitenTest PsicopedagogicosYolanda Rios Miranda86% (7)
- Guiones Del Lazarillo de TormesDokument19 SeitenGuiones Del Lazarillo de TormesGorgola93% (28)
- Evaluación U2 Analisis de Costos UniasturiasDokument7 SeitenEvaluación U2 Analisis de Costos UniasturiasBrenda Mosquera100% (2)
- YalomDokument14 SeitenYalomFederico FReyes100% (4)
- Bases Biologicas de La ConductaDokument21 SeitenBases Biologicas de La ConductaLinda Zapata Elguezabal100% (1)
- Cómo Leer La BibliaDokument9 SeitenCómo Leer La BibliaMoni ArmaniNoch keine Bewertungen
- Comportamiento OrganizacionalDokument3 SeitenComportamiento OrganizacionalCarolina MendozaNoch keine Bewertungen
- Universidad Abierta para Adultos - PsicoterapéuticosDokument7 SeitenUniversidad Abierta para Adultos - PsicoterapéuticosAngela Trebo CamarenaNoch keine Bewertungen
- Filosofía SecundariaDokument18 SeitenFilosofía SecundariaCarlos Alberto Periche Curo100% (2)
- Filosofía AbstractaDokument8 SeitenFilosofía AbstractaIaivan GuntavNoch keine Bewertungen
- Trabajo Escrito Fundamentos Del Diseño GráficoDokument14 SeitenTrabajo Escrito Fundamentos Del Diseño GráficoValentina FajardoNoch keine Bewertungen
- 193222-Formacion de SintomasDokument1 Seite193222-Formacion de SintomasElizabeth MartínezNoch keine Bewertungen
- De Dónde VenimosDokument2 SeitenDe Dónde VenimosLuis RicoNoch keine Bewertungen
- Necesidad y SuficienciaDokument3 SeitenNecesidad y SuficienciaGabriela ReinosaNoch keine Bewertungen
- ParadigmasDokument7 SeitenParadigmasRobertoNoch keine Bewertungen
- Biometria y Diseño PDFDokument10 SeitenBiometria y Diseño PDFgerardoleonchNoch keine Bewertungen
- La Electricidad A Través de La HistoriaDokument2 SeitenLa Electricidad A Través de La HistoriaAlejandro OrdonezNoch keine Bewertungen
- CorrelacionDokument27 SeitenCorrelacionAaronNoch keine Bewertungen
- La Descripcion A en Colombia y Su Import An CIA ... Carlos - Alvaro - Gamboa - RuizDokument8 SeitenLa Descripcion A en Colombia y Su Import An CIA ... Carlos - Alvaro - Gamboa - RuizDiego Armando MéndezNoch keine Bewertungen
- Analiza Las Imágenes y Contesta Las PreguntasDokument27 SeitenAnaliza Las Imágenes y Contesta Las PreguntasClaudia Vielma SaezNoch keine Bewertungen
- Modelo Booleano ExtendidoDokument6 SeitenModelo Booleano ExtendidoWilliam ClavijoNoch keine Bewertungen
- 14 Revista Psicologia SocialDokument16 Seiten14 Revista Psicologia SocialmariafernandaventosNoch keine Bewertungen
- Las Biblia y Las PersonificacionesDokument4 SeitenLas Biblia y Las Personificacioneswilfredo torresNoch keine Bewertungen
- Taller Filosófico El LogosDokument7 SeitenTaller Filosófico El LogosMichael Campo0% (1)
- Bourdieu Cues T I OnesDokument270 SeitenBourdieu Cues T I Onesjuan guillermo betancourthNoch keine Bewertungen
- Laboratorio de Mecánica Vectorial: Practica No.5Dokument7 SeitenLaboratorio de Mecánica Vectorial: Practica No.5Linha LadinoNoch keine Bewertungen
- Definición de ResumenDokument7 SeitenDefinición de ResumenAngelo BravoNoch keine Bewertungen
- Tarea Evaluativa. PreescolarDokument6 SeitenTarea Evaluativa. Preescolarjosemartin92% (12)
- Equipamiento Cultural y ComercialDokument17 SeitenEquipamiento Cultural y ComercialRenzo Manrique DavilaNoch keine Bewertungen