Beruflich Dokumente
Kultur Dokumente
Worsley (2001) Book Chapter
Hochgeladen von
rukavice_belaCopyright
Verfügbare Formate
Dieses Dokument teilen
Dokument teilen oder einbetten
Stufen Sie dieses Dokument als nützlich ein?
Sind diese Inhalte unangemessen?
Dieses Dokument meldenCopyright:
Verfügbare Formate
Worsley (2001) Book Chapter
Hochgeladen von
rukavice_belaCopyright:
Verfügbare Formate
Chapter 14
Statistical Analysis of Activation
Images
K.J. Worsley, McGill University
1
Contents
14 Statistical Analysis of Activation Images 1
14.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
14.1.1 Why do we need statistics? . . . . . . . . . . . . . . . . . . . . . . . 3
14.1.2 Overlap with Multi-Subject Experiments and Connectivity . . . . . . . 3
14.2 Modeling the hemodynamic response . . . . . . . . . . . . . . . . . . . . . . 3
14.3 Removing the drift . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
14.4 Random error . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
14.4.1 Autoregressive models . . . . . . . . . . . . . . . . . . . . . . . . . . 5
14.4.2 State space models . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
14.4.3 Incorporating the drift into the noise . . . . . . . . . . . . . . . . . . 6
14.5 Estimating the signal parameters . . . . . . . . . . . . . . . . . . . . . . . . 6
14.5.1 The fully ecient estimator . . . . . . . . . . . . . . . . . . . . . . . 7
14.5.2 The more robust estimator of SPM99 . . . . . . . . . . . . . . . . . 8
14.5.3 Estimation in Fourier space . . . . . . . . . . . . . . . . . . . . . . . 8
14.5.4 Equivalence of the methods . . . . . . . . . . . . . . . . . . . . . . . 9
14.6 Estimating the variance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
14.7 Detecting an eect . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
14.8 Optimal design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
14.9 Estimating the correlation structure . . . . . . . . . . . . . . . . . . . . . . . 12
14.10Spatial smoothing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
14.10.1Scale space . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
14.10.2Spatial information . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
14.11Estimating the hemodynamic response function . . . . . . . . . . . . . . . . 13
14.11.1Overspecifying the hemodynamic response function . . . . . . . . . . 15
14.11.2Misspecifying the hemodynamic response function . . . . . . . . . . . 15
14.11.3Non-linear hemodynamic response and stimulus non-additivity . . . . 16
14.12Detecting an eect at an unknown location . . . . . . . . . . . . . . . . . . . 17
14.12.1The maximum test statistic . . . . . . . . . . . . . . . . . . . . . . . 17
14.12.2The maximum spatial extent of the test statistic . . . . . . . . . . . . 18
14.12.3Searching in small regions . . . . . . . . . . . . . . . . . . . . . . . . 19
14.13Multiple runs, sessions, and subjects . . . . . . . . . . . . . . . . . . . . . . 20
14.13.1Conjunctions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2
14.1 Introduction
14.1.1 Why do we need statistics?
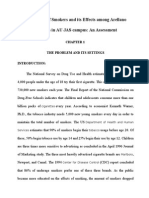
Activation images collected from fMRI contain a very large component of random error,
compared to the small amount of signal present in the images. Figure 14.1 shows the time
trace at a single voxel while a subject recieved 9 second hot, rest, warm, rest stimuli to
the left forearm, repeated every 36 seconds. It is not at all obvious that there is a highly
signicant correlation between the response and the dierence between the hot and warm
stimuli in Figure 14.1(a), yet this time trace comes from a voxel chosen where the response
is in fact the most signicant. For comparison, Figure 14.1(b) comes from a voxel with no
signicant correlation. Both voxels are marked on Figure 14.2, which shows the raw fMRI
data at times corresponding to the hot, rest, warm, rest stimuli.
The purpose of statistics is to estimate the eect of the stimulus on the fMRI data, to
assess the random error in this eect, to estimate its statistical signicance based on the
ratio of eect to error, and nally to sort out those voxels that show a signicant eect from
those that do not.
14.1.2 Overlap with Multi-Subject Experiments and Connectivity
Here we shall be primarliy concerned with the analysis of fMRI data from a single subject.
The following Chapter 15 is concerned with the analysis of data taken on dierent subjects.
We shall also restrict our attention to correlations between the stimulus and the response;
correlations between the response at one voxel and the response at another will be dealt with
in Chapter 16 on connectivity.
14.2 Modeling the hemodynamic response
The rst step in the statistical analysis of fMRI data is to build a model of how the data
responds to an external stimulus. Suppose the fMRI response at a particular voxel at time t is
given by x(t), and the external stimulus is given by s(t). For the experiment above, we might
model the hot stimulus by 1 when the stimulus is on, and 0 when it is o (Figure 14.3(a)).
The corresponding fMRI response is not instantaneous; there is a delay and blurring of the
peak response by about 6 seconds. The simplest way of capturing this is to assume that
the fMRI response depends on the external stimulus by convolution with a hemodynamic
response function h(t) as follows:
x(t) =
_
0
h(u)s(t u)du. (14.1)
Several models for h(t) have been proposed. The simplest is a gamma function (Lange and
Zeger, 1997) or a dierence of two gamma functions to capture over-shoot. An example is
h(t) = (t/d
1
)
a
1
exp((t d
1
)/b
1
) c(t/d
2
)
a
2
exp((t d
2
)/a
2
)). (14.2)
where t is time in seconds, d
j
= a
j
b
j
is the time to the peak, and a
1
= 6, a
2
= 12,
b
1
= b
2
= 0.9 seconds, and c = 0.35 (Glover, 1999) (Figure 14.3(b)). Its convolution x(t)
3
with the hot and warm stimuli s(t) are shown in Figure 14.3(c). This is then subsampled at
the n scan acquistion times t
1
, . . . , t
n
to give the response x
i
= x(t
i
) at scan i.
The combined eect of k dierent stimuli on data in scan i, denoted by x
i1
, . . . , x
ik
is
often assumed to be additive but with dierent coecients
1
, . . . ,
k
that vary from voxel
to voxel. The combined fMRI response is modeled as the linear model (Friston et al., 1995)
x
i1
1
+ + x
ik
k
.
14.3 Removing the drift
Some voxels in fMRI time series data show considerable drift over time (see Figure 14.1(c)).
Drift appears to be largely linear, though some voxels show slow changes in slope. If drift
is not removed then it can either be confounded with the fMRI response, particularly if the
stimuli vary slowly over time, or it can add to the estimate of the random noise. The rst
causes bias in estimates of the eect of the stimuli, the second causes bias in the estimate of
the error of the estimated eect.
One way of removing drift is to suppress low frequencies in the data; a computationally
more ecient method is to model the drift by a linear, quadratic, polynomial or spline
function of time. An alternative is to use low-frequency cosine basis functions (SPM99).
All of these can be written as extra responses x
i,k+1
, . . . , x
i,m
at time i, and added to the
linear model. For example, a polynomial drift of order q can be removed by adding to the
linear model x
i,k+1+j
= i
j
, j = 0, 1, . . . , q, m = k + 1 + q.
The presence of drift also limits the type of stimulus design that can be used with fMRI
experiments. Any stimulus that behaves like drift, such as a steadily increasing stimulus
intensity, cannot be easily distinguished from drift and is either impossible or very dicult
to estimate (i.e. estimable with very high error). This includes block designs with very long
blocks, such as presenting a stimulus continually during the second half of an experiment.
This type of design should be avoided. The best designs should try to present the stimulus
fairly rapidly so that its eect can be assessed over a short period where the drift has little
eect (see Section 14.8 for a discussion of optimal design).
14.4 Random error
In this section we shall look at the nature of the random error. This is very important for
two reasons: rst, it tells us how to best estimate the eect of the stimulus, and second, and
more importantly, it gives us a way of assessing the error in the eect. This then allows us
to compare the eect with its random error, and select those voxels where the eect is much
larger than its random error, that is, voxels with high signal-to-noise ratio.
The way to do this is to rst combine the response and drift terms into a single linear
model. Then a noise component
i
is added to obtain the observed fMRI data, Y
i
, at time
index i:
Y
i
= x
i1
1
+ + x
ik
k
. .
fMRI response
+x
i,k+1
k+1
+ + x
im
m
. .
drift
. +
i
. (14.3)
4
The errors are not independent in time; typically the correlation between scans 3 seconds
apart can be as high as 0.4, particularly in cortical regions (Figure 14.4(a)). Using least
squares to estimate and negelecting to take the correlation structure into account, or using
the wrong correlation model, can cause biases in the estimated error of the estimates of ,
but it does not aect the bias of the estimate of itself, which will always be unbiased
though perhaps less ecient (i.e. more variable).
14.4.1 Autoregressive models
The next step is to model the temporal correlation structure of the errors. The simplest is
the rst order autoregressive model, in which we suppose that the error from the previous
scan is combined with fresh noise to produce the error for the current scan:
i
=
i1
+
i1
,
where || < 1 and
i1
is a sequence of independent and identically distributed normal random
variables with mean 0 and standard deviation
1
i.e.
i1
N(0,
2
1
) (white noise). The
resulting autocorrelation at lag l is
Cor(
i
,
il
) =
|l|
.
This can be extended to autoregressive models of order p, denoted by AR(p), specied by
i
=
1
i1
+
2
i2
+ +
p
ip
+
i1
,
but here the autocorrelation structure is more complex, including oscillatory terms as well
as exponential decay.
14.4.2 State space models
State space models are generalizations of autoregressive models that are extremely powerful
at capturing complex dynamic relationships, including drift (see for example Caines, 1988).
Simple state space models have been proposed by Purdon et al. (1998) which are specied
by:
State equation :
i
=
i1
+
i1
,
Observation equation :
i
=
i
+
i2
,
in which a second independent white noise term
i2
N(0,
2
2
) is added to an AR(1) com-
ponent. This extra component
i2
accounts for scanner white noise which is added to physi-
ological coloured noise
i
from the brain itself. The correlation then becomes
Cor(
i
,
il
) =
|l|
1 + (1
2
)
2
2
/
2
1
,
if l = 0 and 1 if l = 0. In other words, there is a jump at zero lag, known in the geostatistics
literature as a nugget eect. Further autoregressive terms can be added.
5
14.4.3 Incorporating the drift into the noise
An attractive possibility is to incorporate drift terms at this stage as well. Instead of modeling
the drift d
i
by a xed linear trend, we let the slope of the drift vary as well, as follows:
State equations :
_
i
=
i1
+
i1
,
d
i
= d
i1
+ b
i1
,
b
i
= b
i1
+
i3
,
Observation equation :
i
=
i
+ d
i
+
i2
,
where
i3
is yet another white noise term
i3
N(0,
2
3
). The beauty of this model is that the
slope of the drift term d
i
is b
i
, which is itself a continuously varying random walk. Formally
the entire model can now be written as a simple state space model:
State equation :
_
_
_
i
d
i
b
i
_
_
_ =
_
_
_
0 0
0 1 1
0 0 1
_
_
_
_
_
_
i1
d
i1
b
i1
_
_
_ +
_
_
_
i
0
i3
_
_
_,
Observation equation :
i
=
_
1 1 0
_
_
_
_
i
d
i
b
i
_
_
_ +
i2
.
Note that such a model is non-stationary, in that the standard deviation of the error
i
is
steadily increasing.
The main dierence between incorporating the drift into the noise, as opposed to incorpo-
rating it into the signal as in Section 14.3, is simply one of degree. In eect, by incoporating
the drift into the signal we are giving it a variance of 0, whereas incorporating the drift
into the noise gives it a variance which can be greater than zero. The state space model
still allows for a non-random drift because the initial starting values of the state equations
(d
0
, b
0
) are unknown and must still be estimated.
14.5 Estimating the signal parameters
Having established a model for the expected fMRI response (signal) and its random error
(noise), this section looks at how we estimate the signal (Sections 14.6 and 14.9 look at how
we estimate the noise). We present three methods: the best possible (fully ecient) method,
the more robust SPM99 method, and the Fourier space method. Finally we compare the
three methods.
We shall now move to matrix notation, and write
Y =
_
_
_
_
Y
1
.
.
.
Y
n
_
_
_
_
, X =
_
_
_
_
x
11
x
1m
.
.
.
.
.
.
x
n1
x
nm
_
_
_
_
, =
_
_
_
_
1
.
.
.
m
_
_
_
_
, =
_
_
_
_
1
.
.
.
n
_
_
_
_
.
To complete the formal specication, we suppose that the errors are multivariate normal
with mean zero and variance matrix V
2
, where
2
is an unknown scalar, and V is a n n
6
matrix generated, for example, by any of the AR(p) or state space models above. For the
AR(1) model,
V =
_
_
_
_
_
_
_
_
_
1
2
n1
1
n2
2
1
n3
.
.
.
.
.
.
.
.
.
.
.
.
n1
n2
n3
1
_
_
_
_
_
_
_
_
_
,
2
=
2
1
1
2
.
In standard statistical notation, the linear model then becomes
Y = X + , N
n
(0, V
2
). (14.4)
A general unbiased estimator of can be found by rst multiplying (14.4) through by
an n n matrix A to give:
Y = AY,
X = AX,
Y =
X + , = A N
n
(0, AVA
2
). (14.5)
Denoting the pseudoinverse by
+
, the least squares estimator of in (14.5) is:
=
X
+
Y, E(
) = , Var(
) =
X
+
AVA
X
+
2
.
We shall adopt conventional statistical notation and denote estimators by throughout.
14.5.1 The fully ecient estimator
The fully ecient (minimum variance) estimator of is obtained by choosing A so that the
variance of the errors is proportional to the identity matrix, equivalent to whitening the
errors, by the Gauss-Markov Theorem. This is accomplished by factoring V, for example by
a Cholesky factorization, then inverting the transpose of the factor:
V = H
H, A = (H
)
1
, AVA
= I,
where I is the n n identity matrix.
Doing this in practice can be very time consuming if it is repeated at every voxel. For-
tunately there is a simple way of nding A if the errors are generated by an AR(p) process.
It is then only necessary to nd a, the inverse of the transpose of the Cholesky factor of the
rst (p + 1) (p + 1) elements of V. Then the rst (p + 1) (p + 1) elements of A are a,
and the last row of a is repeated down the remaining elements of the lower p diagonals of
A. For the AR(1) model this gives
a =
_
_
1 0
1
2
1
1
2
_
_
,
7
and
A =
_
_
_
_
_
_
_
_
_
_
_
_
1 0 0 0
1
2
1
1
2
0 0
0
1
2
1
1
2
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0
0 0
1
2
1
1
2
_
_
_
_
_
_
_
_
_
_
_
_
.
If the errors are generated by a state space model, then the Kalman lter followed by the
Kalman predictor, both very rapid iterative operations, is equivalent to multiplying by A
(see Caines, 1988).
14.5.2 The more robust estimator of SPM99
An alternative, adopted by SPM99, is to set Aequal to a lower triangular diagonal (Toeplitz)
matrix with ith diagonal equal to the hemodynamic response function h(it) where t is
the time between scans:
A =
_
_
_
_
_
_
_
_
_
h(0) 0 0 0
h(t) h(0) 0 0
h(2t) h(t) h(0)
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0
h((n 1)t) h(2t) h(t) h(0)
_
_
_
_
_
_
_
_
_
.
This smoothes the data and the model, still yielding an unbiased estimator of , but with
slightly increased variance. This small loss of eciency is oset by a more robust estimator
of the variance, that is, an estimator of whose estimated variance is less sensitive to
departures from the assumed form of V (Friston et al., 2000). Rather than modelling the
correlation strucure of the original observations, SPM99 adopts an AR(1) model for the
smoothed data.
14.5.3 Estimation in Fourier space
Still another possibility is to diagonalise V without whitening it. It is a remarkable fact
that if the error process is stationary (the same correlation structure at any time) then this
can be achieved by choosing the rows of A to be the Fourier transform sine and cosine basis
functions:
A =
_
_
_
_
_
_
_
_
_
1 1 1 1
0 sin(2/n) sin(4/n) sin(2(n 1)/n)
1 cos(2/n) cos(4/n) cos(2(n 1)/n)
0 sin(4/n) sin(8/n) sin(4(n 1)/n)
.
.
.
.
.
.
.
.
.
.
.
.
_
_
_
_
_
_
_
_
_
.
The reason is that these basis functions are almost eigenvectors of V. This would be exactly
so if the correlation structure were periodic; non-periodicity is less important if the sequence
8
is long. Multiplying by A is then equivalent to taking the Fourier transform, a very rapid
operation.
The advantage is that the resulting errors become almost independent, but with vari-
ances equal to the spectrum of the process. This simplies the analysis; tting the model
(14.5) is then equivlent to weighted least squares, with weights inversely proportional to
the spectrum. From this point of view, the SPM99 method can be seen as weighted least
squares with weights proportional to the spectrum of the hemodynamic response function,
which gives more weight to the frequencies that are passed by the hemodynamic response,
and less weight to those that are damped by the hemodynamic response.
An added advantage of working in Fourier space is that convolution of the stimulus with
the hemodynamic response function (14.1) becomes simple multiplication of their Fourier
transforms. We make use of this to estimate the hemodynamic response itself in Section
14.11.
14.5.4 Equivalence of the methods
It should be noted that parameter estimation for some types of experimental design are un-
aected by the choice of A. It can be shown that if the columns of X are linear combinations
of p eigenvectors of A
A, then the same estimator can be obtained by using least squares
in model (14.3), i.e. ignoring multiplication by A altogether. For fully ecient estimation,
A
A = V
1
, which has the same eigenvectors as V. Now as remarked above, the eigenvectors
of V are the Fourier sine and cosine functions, provided the error process is stationary.
This implies that stimuli whose intensity varies as a sine or cosine function can be esti-
mated with full eciency by ignoring A. Furthermore, for the SPM99 method, A
A is a
Toeplitz matrix whose eigenvectors are almost the Fourier sines and cosines, so here again a
design of this sort is estimated with full eciency by the SPM99 method. The reason should
now be clear: for this design, the regressors are just 1 at a subset of p of the freqencies, and
zero elsewhere. Data at only these m frequencies are used to estimate m parameters, so any
weighting scheme yields the same parameter estimates.
Block designs are almost sine functions, so these are estimated with almost full eciency
by the SPM99 method; random event related designs have a at spectrum so these are most
aected by the choice of method.
14.6 Estimating the variance
In this section we look at how to estimate the size of the noise, that is the error variance
2
,
assuming for the moment that the error correlation structure V is known (we shall look at
estimating V a little later in Section 14.9). All the information about the noise is carried by
the residuals,
r =
Y
X
= RY, R = I
X
X
+
.
If V is known, then
2
is estimated unbiasedly by
2
= r
r/tr(RAVA
).
9
Its eective degrees of freedom, based on matching second moments, is
= tr(RAVA
)
2
/tr((RAVA
)
2
),
so that the distribution of
2
/
2
is well approximated by a
2
distribution with degrees
of freedom, known as the Satterthwaite approximation. If the estimation is fully ecient, so
that AVA
= I, then the degrees of freedom becomes the usual = n m, where m is the
rank of
X, and the Satterthwaite approximation is exact.
For our example, we have n = 118 scans, k = 2 parameters for the fMRI response, and
q = 4 parameters for a polynomial drift of degree 3, giving m = 6 total parameters. Since
the fully ecient estimator was used, the degrees of freedom is = 118 6 = 112.
14.7 Detecting an eect
Having estimated the signal and the noise in the two previous sections (leaving aside the
question of estimating other parts of the model such as the correlation structure and the
hemodynamic response function until later), we now turn to the key question of detecting
the signal above the random noise.
We must rst stipulate what part of the signal parameters, or eect, we are interested in
detecting. This is done by specifying a contrast vector c for the parameters . The eect is
then the linear combination c
, estimated by the same linear combination of the estimated
parameters c
. For example, if we are interested in the dierence between the hot stimulus
(
1
) and the warm stimulus (
2
), then the contrast vector is c
= (1 1 0 0 0 0) (the four
zeros exclude the cubic drift). This means that the estimate of the eect is c
2
(Figure 14.4(b)).
Having established the contrast and thus the eect, the next step is to nd its variance.
The variance is estimated by
Var(c
) = c
X
+
AVA
X
+
c
2
. (14.6)
The estimated standard deviation
_
Var(c
) is shown in Figure 14.4(c). Note that it is
much higher in cortical regions than elsewhere in the brain. To detect the eect, we test the
null hypothesis that the eect is zero. The test statistic is the T statistic
T = c
/
_
Var(c
)
which has an approximate t distribution with degrees of freedom (exact if AVA
= I) when
there is no eect, c
= 0 (Figure 14.4(d)). The eect is then detected by large values of T.
Sometimes we may wish to make a simultaneous test of several contrasts at once. For
example, we may wish to detect any dierence between the hot and warm stimuli and rest.
This can be done by using a contrast matrix
c
=
_
1 0 0 0 0 0
0 1 0 0 0 0
_
.
10
The rst row compares hot to rest, the second compares warm to rest. To detect K > 1
contrasts at the same time, that is, if c is a mK matrix, the T statistic is replaced by an
F statistic dened by
F =
c
_
Var(c
)
_
1
c
/K
which has an approximate F distribution with K, degrees of freedom (exact if AVA
= I)
when there is no eect, c
= 0. The eects are then detected simultanesously by large
values of F.
14.8 Optimal design
The question arises of how to optimally design the experiment in order to extract as much
information as possible from the data. In other words, how should we choose the frequency
and duration of the stimuli in order to have the greatest sensitivity at detecting the eects,
and to estimate the eects as accurately as possible. If an on-o stimulus is presented too
rapidly in short blocks then the hemodynamic response function will smooth the response
to near uniformity. On the other hand, a short stimulus presentation is desirable since it
capitalises on the temporal correlation, which reduces the variance of the on minus the o
scans. Optimal designs have been investigated by Friston et al. (1999b).
The problem comes down to nding the stimulus that minimises Var(c
) from (14.6).
To simplify the discussion, assume that there is just one parameter, c = 1, no drift, = 1,
and we use the fully ecient estimator so that AVA
= I. Then
Var(
) = 1/X
V
1
X = 1/
n1
j=0
| s
j
|
2
|
h
j
|
2
/v
j
, (14.7)
where
h
j
and s
j
are the Fourier transforms of the hemodynamic response function and the
stimulus at frequency 2j/n, and v
j
is the variance of the Fourier transform of the errors
(spectrum) at that frequency, e.g. v
j
= 1/(1 2a
1
cos(2ij/n) + a
2
1
) for a (periodic) AR(1)
process. For xed total stimulus sum of squares
n
i=1
s(t
i
)
2
=
n1
j=0
| s
j
|
2
, (14.7) is minimised
by placing all of the weight of | s
j
| at the value of j that maximises |
h
j
|
2
/v
j
, and zero
elsewhere. In other words, the optimal design should be a sine wave with frequency that
maximises the spectrum of the hemodynamic response function divided by the spectrum of
the noise. Interestingly enough, this is precisely the stimulus whose estimation is unaected
by the choice of A.
The block design with equal on and o periods should be close to optimal since it closely
matches a sine wave. For the hemodynamic response function (14.2) and an AR(1) process
with 0 0.5 at 3 second scan intervals, the optimal period of the block design is 21
to 16 seconds, or about 4 to 3 times the delay of the hemodynamic response. This optimal
period is not changed greatly by drift removal, which mainly aects low frequency stimuli.
For comparing the response between two stimuli the same result applies: the two stimuli
should be presented alternatively in equal blocks with a period of 21 to 16 seconds.
11
14.9 Estimating the correlation structure
Getting the correct correlation structure is very important for two reasons: rst, it guides us
to the best estimator (see Section 14.5), second, it tells us how to best design the experiment,
(see Section 14.8, but third, and most importantly, it leads to the correct estimator of the
variance of the estimator, vital for getting the correct T or F statistic.
Up till now, we have assumed that V is known. We now turn to estimating the parame-
ters in the underlying model that generates V. We rst estimate by least squares for the
original unsmoothed data (14.4), that is with A = I. While not fully ecient, this estimator
is unbiased, so that the residuals r have zero expectation and a correlation structure approx-
imately equal to that of the errors . The parameters of an AR(p) model are easily estimated
from the autocorelations of the residuals via the Yule-Walker equations, but A = V
1/2
can
be estimated directly from the autocorrelations via the method outlined in Section 14.5.1.
This is based only on an estimate of the rst (p + 1) (p + 1) elements of V, given by the
sample autocorrelation out to lag p:
V
ij
=
Cor(
i
,
j
) =
n
l=|ij|+1
r
l
r
l|ij|
/
n
l=1
r
2
l
, 1 i, j p + 1.
A slight bias creeps into these estimators due to the correlation of the residuals induced by
removing an estimated linear eect from the observations. Typically they are about 0.05
lower than expected. Worsley et al. (2000) gives a simple method of correcting this.
Using the estimated
A, the parameters can be re-estimated from (14.5) and the above
procedure can be itereated to convergence. In practice just one iteration seems to be enough.
The parameters of the state space model can be estimated by using the Kalman predictor
to obtain the likelihood of the parameters. This must then be maximised by iterative methods
to nd maximum likelihood estimators. Purdon et al. (1998) avoided this by estimating the
white noise variance from outside the brain, where the AR(1) contribution is assumed to
be zero, then estimating the AR(1) component from voxels inside the brain, assuming the
white noise variance is the same as outside.
Lange and Zeger (1997) took a non-parametric approach. Noting that the Fourier trans-
form of a stationary error sequence diagonalizes V, they assumed that the diagonal compo-
nents (the spectrum) is a smooth function of the frequency. Instead of tting a model to
the spectrum, they simply smoothed it avoiding the frequencies which contained the signal.
Thus works well for a periodic stimulus, since the signal is then conned to the frequency of
the signal and its higher harmonics. Taking this further, other authors have proposed simply
averaging the spectrum either side of the main harmonic, in eect using linear interpolation
as a form of smoother. These approaches work well only for periodic stimuli.
14.10 Spatial smoothing
So far no information has been used from neighbouring voxels, and all our models have
been tted independently at each voxel. If it is felt that the signal extends over a certain
predetermined region (region of interest, ROI) in space then it can be shown that signal
12
detection is optimal if the data is simply averaged over all voxels in that region (the ROI
approach).
Since we do not usually know the location of the ROI, a reasonable compromise is to
smooth the data with a kernel whose shape matches the assumed spatial activation pattern.
The most common choice is a Gaussian shaped kernel. For example, if it is felt that the
signal covers a 10mm region, then the data should be smoothed with a 10mm wide kernel.
The ROI approach can be seen as a special case in which we smooth the data with a box
kernel whose shape matches the ROI.
14.10.1 Scale space
Smoothing the data has been criticised because it sacrices detectability for resolvability.
Moreover, we need to know in advance the width of the signal to be detected; smoothing
with a 10mm kernel will be optimal for 10mm signals but less optimal for 5 or 20mm signals.
A way out of this was rst proposed by Poline and Mazoyer (1994) in which a range of
lter widths is used to create an extra scale dimension to the data, known as scale space.
To maintain constant resolution in scale space, lter widths should be chosen to be equally
spaced on a log scale, e.g. 8, 12, 18, 27mm. The data is now searched in location as well as
scale, though there is a small price to pay in terms of an increase in the critical threshold of
the resulting T statisitics (see the end of Section 14.12.1).
14.10.2 Spatial information
Solo et al. (2000) have proposed a novel approach to overcoming the problem of incorpo-
rating spatial information without smoothing the data. The idea is to estimate the signal
parameters without smoothing, but to estimate the noise parameters by smoothing the like-
lihood, not the data. An information criterion is used to set the extent of the smoothing,
producing an adaptive smoother. The result is that local information is used to estimate the
variability of the signal, but not the signal itself.
Worsley et al. (2000) took a similar approach by advocating smoothing the parameters
1
, . . . ,
p
of an AR(p) model for the noise, without smoothing the estimators of the signal
or the variance
2
(Figure 14.4.
SPM99 takes this idea to the limit by averaging the AR parameters over all voxels, to
produce a global estimate common to the wole brain. The robustness conferred by high
frequency ltering osets the bias in this estimator.
14.11 Estimating the hemodynamic response function
So far we have assumed a xed parametric form for the hemodynamic response function.
Although the parameters are usually reasonably well known, it is still worth estimating these
parameters. For some types of experiment, the parameters themselves, such as the delay,
are of intrinsic interest.
First we shall present some methods for estimating the hemodynamic response func-
tion parameters, then in Sections 14.11.1 and 14.11.2 we shall look at the cost of over and
13
under estimating these parameters. Finally in Section 14.11.3 we shall look at non-linear
alternatives to the basic convolution model (14.1).
The problem with estimating parameters of the hemodynamic response is that its param-
eters enter the model in a non-linear fashion, requiring time-consuming iterative estimation
methods. Lange and Zeger (1997) take this route, estimating the parameters of a gamma
model by non-linear regression techniques.
Rajapakse et al. (1999) instead modied the form of the hemodynamic response to make
it easier to estimate. They chose a Gaussian function for the hemodynamic repsonse:
h(t) = e
((tm)/v))
2
/2
/(
2v).
The beauty of this is that the Fourier transform of a Gaussian is a simple function of the
mean m and standard deviation v of the hemodynamic response
h() =
_
h(t)e
it
dt = e
im+v
2
2
/2
, i =
1.
Denoting Fourier transform by , the Fourier transform of the response is
x() = s()e
im+v
2
2
/2
.
Neglecting error, so that Y (t) x(t),
Phase(
Y ()/ s()) m, log |
Y ()/ s()| log + v
2
2
/2.
The parameters m, v can then be estimated by least squares. Even though the Gaussian is
not a realistic model for the hemodynamic response, since its support includes negative lags,
this method appears to give reasonable answers.
SPM99 and others have proposed linearizing the scale of the hemodynamic response by
expanding h(t) as a Taylor series in an unknown scale change :
e
h(te
) h(t) + (h t
h(t)),
where
h(t) = h(t)/t. We can then convolve the stimuli with h t
h(t) and add these to
the model, which allows for dierent scales for dierent types of stimuli. It is then possible
to estimate from the ratio of the two coecients.
To give yet greater exibility, SPM99 proposes modeling the hemodynamic response
function as a linear combination of a set of J basis functions b
j
(t), j = 1, . . . , J that capture
possible dierential delays and dispersions:
h(t) =
J
j=1
j
b
j
(t), (14.8)
where
j
, j = 1, . . . , J are unknown parameters to be estimated. One such set of basis
functions is a set of gamma density functions with dierent delays and dispersions, or a
single gamma density modulated by one period of a sine wave with dierent frequencies.
The advantage of this approach is that the response (14.3) is still linear in the unknown
parameters:
x(t) =
_
0
h(u)s(t u)du =
J
j=1
j
__
0
b
j
(u)s(t u)du
_
.
14
If we allow dierent parameters
j
for dierent stimuli, then the resulting model (14.3) is
still a linear model, now in Jm instead of m parameters. This means that all the above
methods can be used to rapidly estimate the parameters and test for activation.
Burock and Dale (2000) have taken this further by replacing the integral in (14.1) by a
sum over the rst few lags, then simply modeling the hemodynamic response by arbitrary
coecients. In eect, they propose modeling the hemodynamic response function by a linear
combination of basis functions as above, with one basis function for each lag taking the value
1 at that lag and 0 elsewhere. This highly parameterised linear model is easy to estimate
but there is an attendant loss of sensitivity at detecting activation, relative to knowing the
hemodynamic response exactly, which we shall discuss in the next section 14.11.1.
Finally, Genovese et al. (2000) have taken the most sophisticated approach. Each part
of the hemodynamic response is modeled separately: the time to onset, the rate of increase,
the duration of the response, the rate of decline, the undershoot, and the recovery. Priors are
constructed for each of these parameters, and all the other signal and noise parameters, and
the entire model is estimated by Bayesian methods using the Gibbs sampler. This makes it
possible to generate the posterior distribution of any combination of parameters, though the
time required for such an analysis is forbidding.
14.11.1 Overspecifying the hemodynamic response function
The reason for the loss of sensitivity when using a large number J of basis functions for the
hemodynamic response is quite simple. The null model with no activation due to one stim-
ulus has no eect of that stimulus and hence no convolution with a hemodynamic response
function. It therefore has J less parameters than the model with activation, so we must use
the F statistic with J, degrees of freedom to detect activation. The sensitivity of the F test
decreases as J increases. It can be shown that this translates into having only about n/J
0.4
observations instead of n observations, for large n. In other words, the extra parameters
dilute the eect of the activation, making it harder to detect.
However it must be remembered that a hemodynamic response function with too few
parameters may be biased, resulting also in a loss of sensitivity because it will fail to capture
all of the response. Obviously one should try to strike a balance between too few parameters
to adequately capture the response, and too many parameters that overts the response.
The lesson is that the more exibility allowed for the response, the more dicult it is
to detect it. The best strategy is to try to model the hemodynamic response with a small
number of well chosen basis functions, or preferably just one basis function. These comments
apply equally well to the nonlinear models in Section 14.11.3.
14.11.2 Misspecifying the hemodynamic response function
What is the cost of misspecifying the hemodynamic response function? First, there is no
eect at all on the validity of the analysis. P-values for detecting pure activation are still
correct even if the hemodynamic response is wrong because they are based on the null model
in which there is no activation and hence no hemodynamic response. However it is still
important to get the hemodynamic response correct when comparing activations, because
15
now the null model does contain a hemodynamic response, equal for the conditions to be
compared.
The main cost of misspecifying the hemodynamic response is a loss of sensitivity. This is
more pronounced for event-related designs than for block designs, because the block stimulus
with long blocks is less aected by convolution with the hemodynamic response function. In
fact some stimuli are completely unaected by convolution with the hemodynamic response
function. One such is the sine wave stimulus with arbitrary amplitude and phase, that is, a
linear combination of sine and cosine with the same known frequency :
s(t) =
1
sin(t) +
2
cos(t).
Convolution of s(t) with any hemodynamic response function changes
1
and
2
but leaves
the form of the model unchanged. This means that for this design, there is no cost to
misspecifying the hemodynamic response in fact it can be ignored altogether.
14.11.3 Non-linear hemodynamic response and stimulus non-additivity
The linearity of the hemodynamic response, and hence the additivity of signals closely sep-
arated in time, has been questioned by several authors. Is the response always a simple
convolution of stimuli with a hemodynamic response function? Friston et al. (1998) has
addressed this by expanding the hemodynamic convolution itself as a set of Volterra kernels.
The second-order model is:
x(t) =
_
0
h
1
(u
1
)s(t u
1
)du
1
+
_
0
_
0
h
2
(u
1
, u
2
)s(t u
1
)s(t u
2
)du
1
du
2
. (14.9)
The rst term is the simple convolution model (14.1) in which past stimuli have a linear
eect on the current response. The second term is the second-order Volterra kernel in which
past stimuli have a quadratic (including interactions) eect on the current response. (Note
that without loss of generality h
2
is symmetric: h
2
(u
1
, u
2
) = h
2
(u
2
, u
1
).) In other words,
this model allows for the possibility that the eect of stimuli may not be purely additive;
the response to two stimuli in close succession may be dierent from the sum of the separate
resposnes if the two stimuli are far apart in time.
It might be possible to estimate the second-order kernel by extending the method of
Burock and Dale (2000) (Section 14.11). The integrals in (14.9) could be replaced by sum-
mations over the rst few lags, and the discrete kernels become arbitrary unknown param-
eters. The result is once again a large linear model including linear and quadratic terms in
the rst few lags of the stimulus. However the large number of parameters to be estimated
might make this method prohibitive.
A more practical suggestion, due to Friston et al. (1998), is to model the rst and second
order kernels by a linear combination of a small number of basis functions b
j
(t), j = 1, . . . , J,
extending (14.8):
h
1
(u
1
) =
J
j=1
j
b
j
(u
1
), h
2
(u
1
, u
2
) =
J
j=1
J
k=1
jk
b
j
(u
1
)b
k
(u
2
),
16
where
j
,
jk
, 1 j k J are unknown parameters to be estimated. The convolution of
each basis function with the stimulus is
z
j
(t) =
_
0
b
j
(u)s(t u)du,
so that the response becomes
x(t) =
J
j=1
j
z
j
(t) +
J
j=1
J
k=j
jk
z
j
(t)z
k
(t),
which is once again linear in the unknown parameters, so it can be tted by the linear models
methods above. Linearity of the hemodynamic response and stimulus additivity can now be
tested by an F statistic for the bivariate terms
jk
, 1 j k J as in Section 14.7.
14.12 Detecting an eect at an unknown location
In this section we shall look at the question of detecting an eect c
or activation (c
> 0)
at an unknown spatial location, rather than at a known location as in Section 14.7. Very
often we do not know in advance where to look for an eect, and we are interested in
searching the whole brain, or part of it. This presents special statistical problems related to
the problem of multiple comparisons, or multiple tests. Two methods have been proposed,
the rst based on the maximum of the T or F statistic, the second based on the spatial
extent of the region where these statistics exceed some threshold value. Both involve results
from random eld theory (Adler, 1981).
14.12.1 The maximum test statistic
An obvious method is to select those locations where a test statistic Z (which could be the
T statistic or F statistic of Section 14.7) is large, that is, to threshold the image of Z at a
height z. The problem is then to choose the threshold z to exclude false positives with a
high probability, say 0.95. Setting z to the usual (uncorrected) P = 0.05 critical value of Z
(1.64 in the Gaussian case) means that 5% of the unactivated parts of the brain will show
false positives. We need to raise z so that the probability of nding any activation in the
non-activated regions is 0.05. This is a type of multiple comparison problem, since we are
testing the hypothesis of no activation at a very large number of voxels.
A simple solution is to apply a Bonferroni correction. The probability of detecting any
activation in the unactivated locations is bounded by assuming that the unactivated locations
cover the entire search region. By the Bonferroni inequality, the probabilty of detecting any
activation is further bounded by
P(max Z > z) N P(Z > z), (14.10)
where the maximum is taken over all N voxels in the search region. For a P = 0.05 test of
Gaussian statistics, critical thresholds of 4-5 are common. This procedure is conservative if
the image is smooth, although for fMRI data it often gives very accurate thresholds.
17
Random eld theory gives a less conservative (lower) P-value if the image is smooth:
P(max Z > z)
D
d=0
Resels
d
EC
d
(z), (14.11)
where D is the number of dimensions of the search region, Resels
d
is the number of d-
dimensional resels (resolution elements) in the search region, and EC
d
(z) is the d-dimensional
Euler characteristic density. The approximation (14.11) is based on the fact that the left
hand side is the exact expectation of the Euler characteristic of the region above the threshold
z. The Euler characteristic counts the number of clusters if the region has no holes, which
is likely to be the case if z is large. Details can be found in Worsley et al. (1996a).
The approximation (14.11) is accurate for search regions of any size or shape, even a
single point, but it is best for search regions that are not too concave. Sometimes it is better
to surround a highly convoluted search region, such as the cortical surface, by a convex hull
with slightly higher volume but less surface area, to get a lower and more accurate P-value.
For large search regions, the last term (d = 3) is the most important. The number of
resels is
Resels
3
= V/FWHM
3
,
where V is the volume of the search region and FWHM is the eective full width at half
maximum of a Gaussian kernel used to smooth the data. The corresponding EC density for
a T statistics image with degrees of freedom is
EC
3
(z) =
(4 log
e
2)
3
2
(2)
2
_
1
z
2
1
_
_
1 +
z
2
1
2
(1)
.
For small search regions, the lower dimensional terms d < 3 become important. However
the P-value (14.11) is not very sensitive to the shape of the search region, so that assuming
a spherical search region gives a very good approximation. In practice, it is better to take
the minimum of the the two P-values (14.10) and (14.11). Figure 14.5 shows the T statistic
thresholded at the P = 0.05 value of z = 4.86, found by equating (14.11) to 0.05 and solving
for z.
Extensions of the result (14.11) to scale space random elds are given in Worsley et al.
(1996b). Here the search is over all spatial lter widths as well over location, so that the
width of the signal is estimated as well as its location. The price to pay is an increase in
critical threshold of about 0.5.
14.12.2 The maximum spatial extent of the test statistic
An alternative test can be based on the spatial extent of clusters of connected components
of supra threshold voxels where Z > z (Friston et al., 1994). Typically z is chosen to be
about 3 for a Gaussian random eld. Once again the image must be a smooth stationary
random eld. The idea is to approximate the shape of the image by a quadratic with a peak
at the local maximum. For a Gaussian random eld, it can be shown that the second spatial
derivative of this quadratic is well approximated by
Z = z, where = Var(
Z), for large
18
z. The spatial extent S is then approximated by the volume of the quadratic of height H
above z:
S cH
D/2
, where c = (2/z)
D/2
/{det()
1/2
(D/2 + 1)}. (14.12)
For large z, the upper tail probabilty of H is well approximated by
P(H > h) = P(max Z > z + h)/P(max Z > z) exp(zh), (14.13)
from which we conclude that H has an approximate exponential distribution with mean 1/z.
From this we can nd the approximate P-value of the spatial extent S of a single cluster:
P(S > s) exp(z(s/c)
2/D
). (14.14)
The P-value for the largest spatial extent is obtained by a simple Bonferroni correction for
the expected number of clusters N:
P(max S > s) E(N) P(S > s), where E(N) P(max Z > z) (14.15)
from (14.11).
We can substantially improve the value of the constant c by equating the expected total
spatial extent, given by V P(Z > z), to that obtained by summing up the spatial extents of
all the clusters S
1
, . . . , S
N
:
V P(Z > z) = E(S
1
+ + S
N
) = E(N) E(S).
Using the fact that
E(S) c(D/2 + 1)/z
D/2
from (14.12), it follows that
c FWHM
D
z
D/2
P(Z > z)/{EC
D
(z) (D/2 + 1)}.
Cao (1999) has extended these results to T and F elds, but unfortunatley there are no
theoretical results for non-smooth elds such as raw fMRI data.
14.12.3 Searching in small regions
For small pre-specied search regions such as the cingulate, the P-values for the maximum
test statistic are very well estimated by (14.11), but the results in section 14.12.2 only apply
to large search regions. Friston (1997) has proposed a fascinating method that avoids the
awkward problem of pre-specifying a small search region altogether. We threshold the image
of test statistics at z, then simply pick the nearest peak to a point or region of interest. The
clever part is this. Since we have identied this peak based only on its spatial location and
not based on its height or extent, there is now no need to correct for searching over all peaks.
Hence, the P-value for its spatial extent S is simply P(S > s) from (14.14), and the P-value
for its peak height H above z is simply P(H > h) from (14.13).
19
14.13 Multiple runs, sessions, and subjects
fMRI experiments are often repeated for several runs in the same session, several sessions on
the same subject, and for several subjects drawn from a population. We shall assume that
all the images have been alligned to a common stereotactic space (see Chapter 15), so that
anatomical variability is not a problem. Nevertheless, there remains a very dierent sort of
statistical problem.
It has long been recognized that a simple xed eects analysis, in which we assume that
the signal strength is identical in all runs, sessions and subjects is incorrect (Holmes and
Friston, 1998). A random eects analysis seems the most appropriate, in which the error of
the eect is calculated from independent repetitions, not from the noise error . Unfortu-
nately this leads to an awkward practical problem: usually the number of repetitions (runs,
seesions, subjects) is small, so the available degrees of freedom is small. For most purposes
this would not be too serious, but in brain mapping we are often looking in the extreme tails
of the distribution, where low degrees of freedom give very large critical thresholds for max-
imum test statistics, which substantially reduce the sensitivity of detecting any activation.
Added to this is the problem of the Gaussian assumption for the errors; although the Central
Limit Theorem assures good normality for test statistics, it is not clear that normality is
maintained far into the tails of the distribution.
In PET data, degrees of freedom can be increased by spatially smoothing the random
eects variance to produce a global estimate for the entire brain. Unfortunately this cannot
be done for fMRI data because the variance is much too spatially structured. Instead,
Worsley et al. (2000) assume that the ratio of random eects variance
2
random
to xed
eects variance
2
xed
is locally constant. The degrees of freedom is increased by spatially
smoothing this ratio with a w
ratio
= 15mm FWHM Gaussian kernel, then multiplying back
by the unsmoothed xed eects variance. The residual variance is then estimated by
2
residual
=
2
xed
smooth(
2
random
/
2
xed
).
The result is a slightly biased but much less variable estimate of the variance of an eect,
that comes midway between a random eects analysis (no smoothing, w
ratio
= 0) and a xed
eects analysis (complete smoothing, w
ratio
= , to a global ratio of 1).
A simple formula, based on random eld theory, gives the eective degrees of freedom of
the variance ratio:
ratio
=
random
(2(w
ratio
/w
data
)
2
+ 1)
3/2
,
where
random
is the random eects degrees of freedom and w
data
is the FWHM of the fMRI
signal, usually taken to be that of the raw data (typically 6mm). The nal eective degrees
of freedom of the residuals,
residual
, is estimated by
1/
residual
= 1/
ratio
+ 1/
xed
,
where
xed
is the xed eects degrees of freedom. In practice we choose the amount of
smoothing w
ratio
so that the nal degrees of freedom
residual
is at least 100, ensuring that
errors in its estimation do not greatly aect the distribution of test statistics.
20
14.13.1 Conjunctions
An alternative method of dealing with multiple subjects is through conjunctions. A conjunc-
tion is simply the locations where all the subjects test statistics exceed a xed threshold
(Friston et al., 1999a). We are interested in the P-value of this event if in fact there is no
activation for any of the subjects, which is equivalent to the P-value of the maximum (over
location) of the minimum (over subjects) of the test statistic images. There is a neat formula
for this based on random eld theory (Worsley and Friston, 2000).
It is useful to compare this with the above regularized random eects analysis. As it
stands, conjunction analysis is still a xed eects analysis, since the distribution of the test
statistic is based on errors estimated within subjects, rather than between subjects. The
random eects analysis assumes that there is an eect for each subject that is zero when
averaged over all subjects. In other words, the random eects analysis is using a much
weaker null hyopthesis than the xed eects analysis; the random eects analysis assumes
that there is an eect, but this eect is randomly distributed about zero; the xed eects
analysis demands in addition that the variability of this random eect is zero, forcing the
eect on each subject to be identically zero.
However Friston et al. (1999a) turns the conjunction analysis into a neat test for a type
of random eect. He asks the following question: suppose we say that a given subject shows
an eect if it passes a usual P = 0.05 test based on a xed eect; what is the probability
that all subjects will show this type of eect in some small region (i.e. a conjunction), if
in fact a proportion do, and the rest do not? The paper then gives a lower bound for ,
based on the data, such that the true is larger than the lower bound with a probability of
at least 0.95. In other words, we obtain a type of (conservative) condence interval for the
proportion of subjects that show a xed eect.
REFERENCES
Adler, R.J. (1981). The Geometry of Random Fields. New York: Wiley.
Caines, P.E. (1988). Linear Stochastic Systems. New York: Wiley.
Cao, J. (1999). The size of the connected components of excursion sets of
2
, t and F elds.
Advances in Applied Probability, 31:577-593.
Burock, M.A., and Dale, A.M. (2000). Estimation and detection of event-related fMRI
signals with temporally correlated noise: a statistically ecient unbiased approach.
Human Brain Mapping, in press.
Friston, K.J., Worsley, K.J., Frackowiak, R.S.J., Mazziotta, J.C. & Evans, A.C. (1994).
Assessing the signicance of focal activations using their spatial extent. Human Brain
Mapping, 1:214-220.
Friston, K.J., Holmes, A.P., Worsley, K.J., Poline, J-B., Frith, C.D. & Frackowiak, R.S.J.
(1995). Statistical parametric maps in functional imaging: A general linear approach.
Human Brain Mapping, 2:189-210.
21
Friston, K.J. (1997). Testing for anatomically specied regional eects. Human Brain
Mapping, 5:133-136.
Friston, K.J., Josephs, O., Rees, G., and Turner, R. (1998). Nonlinear event-related re-
sponses in fMRI. Magnetic Resonance in Medicine, 39:41-52.
Friston, K.J., Holmes, A.P., Price, C.J., B uchel, C., and Worsley, K.J. (1999a). Multi-
subject fMRI studies and conjunction analyses. NeuroImage, 10:385-396.
Friston, K.J., Zarahn, E., Josephs, O., Henson, R.N., and Dale, A.M. (1999b). Stochastic
designs in event-related fMRI. NeuroImage, 10:607-619.
Glover, G.H. (1999). Deconvolution of impulse response in event-related BOLD fMRI.
NeuroImage, 9:416-429.
Holmes, A.P., and Friston, K.J. (1998). Generalizability, random eects, and population
inference. NeuroImage, 7:S754.
Lange, N. and Zeger, S.L. (1997). Non-linear Fourier time series analysis for human brain
mapping by functional magnetic resonance imaging (with Discussion). Applied Statis-
tics, 46, 1-29.
Poline, J-B., and Mazoyer, B.M. (1994). Enhanced detection in activation maps using a
multiltering approach. Journal of Cerebral Blood Flow and Metabolism 14:690-699.
Purdon, P.L., Solo, V., Brown, E., Buckner, R., Rotte, M., and Weissko, R.M. (1998).
fMRI noise variability across subjects and trials: insights for noise estimation methods.
NeuroImage, 7:S617.
Rajapakse, J.C., Kruggel, F., Maisog, J.M., and von Cramon, D.Y. (1998). Modeling hemo-
dynamic response for analysis of functional MRI time-series. Human Brain Mapping,
6:283-300.
Solo, V., Purdon, P., Brown, E., and Weissko, R. (1999). A signal estimation approach
to functional MRI. IEEE Transactions on Medical Imaging, submitted.
Worsley, K.J., Marrett, S., Neelin, P., Vandal, A.C., Friston, K.J. & Evans, A.C. (1996a).
A unied statistical approach for determining signicant signals in images of cerebral
activation. Human Brain Mapping, 4:58-73.
Worsley, K.J., Marrett, S., Neelin, P. & Evans, A.C. (1996b). Searching scale space for
activation in PET images. Human Brain Mapping, 4:74-90.
Worsley, K.J., Liao, C., Grabove, M., Petre, V., Ha, B. & Evans, A.C. (2000). A general
statistical analysis for fMRI data. NeuroImage, 11:S648.
22
Figure 14.1: Time traces of fMRI data at three voxels selected from Figure 14.2. The subject
recieved 9 second hot, rest, warm, rest stimuli to the left forearm, repeated every 36 seconds.
The voxels were selected to illustrate: (a) highly signicant correlation between the fMRI
data and the dierence between the hot and warm stimuli; (b) no signicant correlation; (c)
drift.
Figure 14.2: Four scans of the fMRI data in Figure 14.1 at the end of the rst rest, hot, rest
and warm stimuli. The location of the voxels in Figure 14.1 are marked a, b, c.
Figure 14.3: (a) The hot and warm stimuli s(t), (b) the hemodynamic response function
h(t) and (c) its convolution with s(t) to give the response x(t). The time between scans is
t = 3s, so x(t) is then subsampled at the n = 118 scan acquistion times t
i
= 3i to give the
response x
i
= x(t
i
) at time index i = 1, . . . , n.
Figure 14.4: Statistical analysis of the fMRI data. (a) The estimated AR(1) autocorrelation
parameter after bias correction and spatial smoothing with a 15mm FWHM Gaussian lter.
Note that the correlation is high in cortical regions. (b) The eect of the hot stimulus minus
the warm stimulus, c
. (c) The estimated standard deviation of the eect (
Var(c
))
1/2
.
Note that it is much higher in cortical regions than elsewhere in the brain. (d) The T statistic
T equal to (b) divided by (c), with = 112 degrees of freedom.
Figure 14.5: The T statistic thresholded at the P = 0.05 value of 4.86.
23
Das könnte Ihnen auch gefallen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Certified Quality Engineer Problem Bank 3Dokument34 SeitenCertified Quality Engineer Problem Bank 3jackanddiane1100% (2)
- Brain FactsDokument96 SeitenBrain FactsNitesh ChhabriaNoch keine Bewertungen
- "Probability Models For Hockey Betting" Ravi Patel IB SL MathDokument9 Seiten"Probability Models For Hockey Betting" Ravi Patel IB SL MathVLONE100% (3)
- Test Bank DBA Chapter 3 Chi SquareDokument20 SeitenTest Bank DBA Chapter 3 Chi Squaremohamed100% (1)
- Chapter 1-5Dokument36 SeitenChapter 1-5Glenn Midel Delos Santos90% (42)
- Menninghaus - Disgust PDFDokument480 SeitenMenninghaus - Disgust PDFAgustina Perez100% (1)
- Menninghaus - Disgust PDFDokument480 SeitenMenninghaus - Disgust PDFAgustina Perez100% (1)
- Ageing & VariabilityDokument17 SeitenAgeing & Variabilityrukavice_belaNoch keine Bewertungen
- Survival of The FattestDokument10 SeitenSurvival of The Fattestrukavice_belaNoch keine Bewertungen
- Type 1&type 2 ErrrorsDokument24 SeitenType 1&type 2 Errrorsrukavice_belaNoch keine Bewertungen
- FSL Feat AnalysisDokument94 SeitenFSL Feat Analysisrukavice_belaNoch keine Bewertungen
- GLM EquationDokument1 SeiteGLM Equationrukavice_belaNoch keine Bewertungen
- LeopardiDokument1 SeiteLeopardirukavice_belaNoch keine Bewertungen
- Reviewing The Legality of Kosovo's Territorial StatusDokument24 SeitenReviewing The Legality of Kosovo's Territorial Statusrukavice_belaNoch keine Bewertungen
- Is Organic Better - Ask A Fruit FlyDokument8 SeitenIs Organic Better - Ask A Fruit Flyrukavice_belaNoch keine Bewertungen
- 2 Random VectorsDokument53 Seiten2 Random VectorsslowjamsNoch keine Bewertungen
- BUS 525 Assignment - Md. Shahriaz SirajDokument33 SeitenBUS 525 Assignment - Md. Shahriaz SirajShahriaz SirajNoch keine Bewertungen
- Multiple Choice Sample QuestionsDokument4 SeitenMultiple Choice Sample QuestionsThoa VũNoch keine Bewertungen
- 01 Contact NastranDokument26 Seiten01 Contact NastranGustavoYippeekayyayGusNoch keine Bewertungen
- Complete NotesDokument153 SeitenComplete NotesSungsoo KimNoch keine Bewertungen
- Vipparthi and MargamDokument12 SeitenVipparthi and MargamUpender Kumar100% (1)
- Chi Square POGILDokument3 SeitenChi Square POGILCody PalmerNoch keine Bewertungen
- ME Structural MA510 Unit III Test of Hypothesis.284234729Dokument11 SeitenME Structural MA510 Unit III Test of Hypothesis.284234729Sayantan NandyNoch keine Bewertungen
- Model LinearDokument33 SeitenModel LinearIvan AliagaNoch keine Bewertungen
- Sofimsha 1Dokument133 SeitenSofimsha 1Chris LumyNoch keine Bewertungen
- Anova 123Dokument9 SeitenAnova 123Yann YeuNoch keine Bewertungen
- Section 1 - Section 1 Question No.1 Bookmark: Examination: M.Sc. StatisticsDokument22 SeitenSection 1 - Section 1 Question No.1 Bookmark: Examination: M.Sc. StatisticsIsmart KrishnaNoch keine Bewertungen
- STT843 HW2 Solution YiChenDokument24 SeitenSTT843 HW2 Solution YiChenSudi ImeshaNoch keine Bewertungen
- Aleks 1.74Dokument4 SeitenAleks 1.74Janine Sophia CabreraNoch keine Bewertungen
- Design of Experiments Application, Concepts, Examples: State of The ArtDokument19 SeitenDesign of Experiments Application, Concepts, Examples: State of The ArtMeditation ChannelNoch keine Bewertungen
- A Literature Survey On Optimization of Drilling Process For Different MaterialsDokument11 SeitenA Literature Survey On Optimization of Drilling Process For Different MaterialsInternational Journal of Technology and Emerging Sciences (IJTES)Noch keine Bewertungen
- CHAPTER 11 Chi Square and Other Non Parametric TestsDokument77 SeitenCHAPTER 11 Chi Square and Other Non Parametric TestsAyushi JangpangiNoch keine Bewertungen
- Unc Sidekick User ManualDokument83 SeitenUnc Sidekick User ManualMilicaNoch keine Bewertungen
- Mancova GuidanceDokument39 SeitenMancova GuidancePhilemon NshimiyimanaNoch keine Bewertungen
- TEST-5 Material F - Test and Chi-Square Test PDFDokument12 SeitenTEST-5 Material F - Test and Chi-Square Test PDFRizon Kumar RahiNoch keine Bewertungen
- Psych Stat Notes FinalDokument11 SeitenPsych Stat Notes FinalKdrama SweetieNoch keine Bewertungen
- Chapter Sixteen: Analysis of Variance and CovarianceDokument51 SeitenChapter Sixteen: Analysis of Variance and CovarianceSAIKRISHNA VAIDYANoch keine Bewertungen
- Derivation of Tapered Beam P VerDokument45 SeitenDerivation of Tapered Beam P VerRyan_RajmoolieNoch keine Bewertungen
- Regression With Panel DataDokument16 SeitenRegression With Panel DataSudhansuSekharNoch keine Bewertungen
- Reporting Statistics in APA StyleDokument2 SeitenReporting Statistics in APA StyleОлена КаніщеваNoch keine Bewertungen
- CH 17 StatisticaDokument36 SeitenCH 17 StatisticaEugenNoch keine Bewertungen