Das könnte Ihnen auch gefallen
- Filter TutorialDokument15 SeitenFilter TutorialNikitaPrabhuNoch keine Bewertungen
- Analog and Digital FiltersDokument7 SeitenAnalog and Digital Filterssherni99Noch keine Bewertungen
- Digital Signal Processing: Introduction To Digital FilterDokument26 SeitenDigital Signal Processing: Introduction To Digital FilterMuhamad Iftikhar Ibnu ShariNoch keine Bewertungen
- Chapter 8Dokument8 SeitenChapter 8Aldon JimenezNoch keine Bewertungen
- Project On Wireless CommunicationDokument16 SeitenProject On Wireless CommunicationAkshat SharmaNoch keine Bewertungen
- Digital filter - WikipediaDokument27 SeitenDigital filter - WikipediaanntreesajoeNoch keine Bewertungen
- TechnicalReview1977 1Dokument34 SeitenTechnicalReview1977 1mastelecentroNoch keine Bewertungen
- Design and Analysis of RC Low Pass Filter in MATLAB SimulinkDokument9 SeitenDesign and Analysis of RC Low Pass Filter in MATLAB Simulinksumit valsangkarNoch keine Bewertungen
- TMS320F2812 - FIR FilterDokument36 SeitenTMS320F2812 - FIR FilterPantech ProLabs India Pvt LtdNoch keine Bewertungen
- Infinite Impulse Response FiltersDokument41 SeitenInfinite Impulse Response FiltersPavithra ArumugamNoch keine Bewertungen
- AverageFilteringDokument22 SeitenAverageFiltering7204263474Noch keine Bewertungen
- Digital Control System - Lecture 2Dokument21 SeitenDigital Control System - Lecture 2adityarajput2928Noch keine Bewertungen
- Chapter 2 Discrete Data Control SystemsDokument78 SeitenChapter 2 Discrete Data Control SystemsAmruth ThelkarNoch keine Bewertungen
- Lab 2 FiltersDokument14 SeitenLab 2 FiltersBeatrice ShokryNoch keine Bewertungen
- Filtros Digitales 1Dokument18 SeitenFiltros Digitales 1vervesolarNoch keine Bewertungen
- Bandpass Indicator Provides Leading Signal for Cyclical MarketsDokument7 SeitenBandpass Indicator Provides Leading Signal for Cyclical MarketsJim Baxter100% (1)
- ET 304A Laboratory Tutorial-Circuitmaker For Transient and Frequency AnalysisDokument7 SeitenET 304A Laboratory Tutorial-Circuitmaker For Transient and Frequency AnalysisZhong XiangNoch keine Bewertungen
- Variable Digital Filter Response Time in A Digital Distance RelayDokument22 SeitenVariable Digital Filter Response Time in A Digital Distance RelayJorge A AguilarNoch keine Bewertungen
- Adaptive Lab Matlab Part3Dokument3 SeitenAdaptive Lab Matlab Part3haniaafefNoch keine Bewertungen
- Two Marks Questions Mechatronics (MH1031) Unit - 1Dokument12 SeitenTwo Marks Questions Mechatronics (MH1031) Unit - 1cakejhNoch keine Bewertungen
- Difference Equations For FIR and IIR Filters: ObjectivesDokument8 SeitenDifference Equations For FIR and IIR Filters: ObjectivesAldon JimenezNoch keine Bewertungen
- Some Case Studies on Signal, Audio and Image Processing Using MatlabVon EverandSome Case Studies on Signal, Audio and Image Processing Using MatlabNoch keine Bewertungen
- Class Notes - Digital Filters for Numerical RelayDokument4 SeitenClass Notes - Digital Filters for Numerical RelaybiswajitsahooNoch keine Bewertungen
- Ece3101l Lab5 Sampling and ReconstructionDokument5 SeitenEce3101l Lab5 Sampling and ReconstructionGhostFTW gamingNoch keine Bewertungen
- Digital Electronics Assignment A: Combinational vs Sequential Logic, Synchronous vs Asynchronous CountersDokument7 SeitenDigital Electronics Assignment A: Combinational vs Sequential Logic, Synchronous vs Asynchronous CountersDebbie UzoNoch keine Bewertungen
- Department of Electrical Engineering EE365L: Communication SystemsDokument20 SeitenDepartment of Electrical Engineering EE365L: Communication SystemsAbrahan ShahzadNoch keine Bewertungen
- Fed STD 1016Dokument24 SeitenFed STD 1016Sevy Tom ZoriuqNoch keine Bewertungen
- Sirisha Kurakula G00831237 ProjectDokument12 SeitenSirisha Kurakula G00831237 ProjectSirisha Kurakula0% (1)
- Fir Filter Verilog FpgaDokument10 SeitenFir Filter Verilog FpgatkbattulaNoch keine Bewertungen
- Introduction to Digital Control SystemsDokument70 SeitenIntroduction to Digital Control SystemsAmruth Thelkar67% (3)
- Design of The Measurement System of The Pump Based On LabviewDokument4 SeitenDesign of The Measurement System of The Pump Based On LabviewJulio CésarNoch keine Bewertungen
- Digital Filter Design Using MatlabDokument41 SeitenDigital Filter Design Using MatlabKirti Susan VargheseNoch keine Bewertungen
- Filter: Filter Signal Processing Statistics Applied MathematicsDokument5 SeitenFilter: Filter Signal Processing Statistics Applied MathematicsJiiva RajeshNoch keine Bewertungen
- NT Filtering E 0808Dokument7 SeitenNT Filtering E 0808walkeralfaroNoch keine Bewertungen
- Elec9123 DSP DesignDokument7 SeitenElec9123 DSP DesignSydney FinestNoch keine Bewertungen
- 4th Class, Production Engineering Department of Production Engineering and Metallurgy, University of Technology, BaghdadDokument94 Seiten4th Class, Production Engineering Department of Production Engineering and Metallurgy, University of Technology, BaghdadMegaroboMegaroboNoch keine Bewertungen
- Design and Comparison of Butterworth and Chebyshev Type-1 Low Pass Filter Using MatlabDokument16 SeitenDesign and Comparison of Butterworth and Chebyshev Type-1 Low Pass Filter Using MatlabResearch Cell: An International Journal of Engineering SciencesNoch keine Bewertungen
- Manual 19032012Dokument33 SeitenManual 19032012Hirankur KhillareNoch keine Bewertungen
- 1.0 Introduction To Filter: RF Engineering - Passive Circuit Microstrip Filter DesignDokument20 Seiten1.0 Introduction To Filter: RF Engineering - Passive Circuit Microstrip Filter DesignapecevsbNoch keine Bewertungen
- Lab 08 Filter DesignDokument8 SeitenLab 08 Filter DesignfarhanNoch keine Bewertungen
- Digital Control Systems Lecture Notes: Introduction and Signal ProcessingDokument61 SeitenDigital Control Systems Lecture Notes: Introduction and Signal ProcessingHari Pavan0391Noch keine Bewertungen
- Weekly PP PDFDokument11 SeitenWeekly PP PDFDanielHaileNoch keine Bewertungen
- IIR Filter - Report: University of PisaDokument20 SeitenIIR Filter - Report: University of PisaDuong Quynh GiangNoch keine Bewertungen
- Digital Filter Design and Algorithm Implementation With Embedded Signal ProcessorsDokument7 SeitenDigital Filter Design and Algorithm Implementation With Embedded Signal Processorsskynet123Noch keine Bewertungen
- Discrete Wavelet Transform Using Circular ConvolutionDokument6 SeitenDiscrete Wavelet Transform Using Circular ConvolutionijsretNoch keine Bewertungen
- FIR Low Pass FilterDokument9 SeitenFIR Low Pass FilterTwinsterNoch keine Bewertungen
- IIR FilterDokument50 SeitenIIR FilterWan Ting100% (1)
- AN699 - Anti-Aliasing, Analog Filters For Data Acquisition Systems-00699bDokument13 SeitenAN699 - Anti-Aliasing, Analog Filters For Data Acquisition Systems-00699bRicky CoxNoch keine Bewertungen
- Digital Control System PDFDokument0 SeitenDigital Control System PDFwww.bhawesh.com.np100% (1)
- Labview Exercises 2Dokument6 SeitenLabview Exercises 2salinero2488100% (1)
- NGSPICE Manual-Devices and Circuits LabDokument15 SeitenNGSPICE Manual-Devices and Circuits LabShreya R HNoch keine Bewertungen
- Harmonic Elimination in Single Phase Systems Using a Hybrid Series Active Filter (HSAFDokument41 SeitenHarmonic Elimination in Single Phase Systems Using a Hybrid Series Active Filter (HSAFadityajammula100% (3)
- FILTERING LECTURE COVERS SMOOTHING, CAUSAL, IIR FILTERSDokument16 SeitenFILTERING LECTURE COVERS SMOOTHING, CAUSAL, IIR FILTERSwanted247Noch keine Bewertungen
- INSTRUMENTATIONDokument34 SeitenINSTRUMENTATIONIsaac KimaruNoch keine Bewertungen
- Dsp-Unit 5.1 Analog FiltersDokument67 SeitenDsp-Unit 5.1 Analog FiltersMaheswaraNoch keine Bewertungen
- IIR Filters Presentation by Dr. M. MurugappanDokument54 SeitenIIR Filters Presentation by Dr. M. MurugappanAiran Tan100% (1)
- Digital Signal Processing: Instant AccessVon EverandDigital Signal Processing: Instant AccessBewertung: 3.5 von 5 Sternen3.5/5 (2)
- Digital Spectral Analysis MATLAB® Software User GuideVon EverandDigital Spectral Analysis MATLAB® Software User GuideNoch keine Bewertungen
- SIMCOM 900 GSM Module GSM GPRS Modem Features RS232 Interface TCP IP StackDokument3 SeitenSIMCOM 900 GSM Module GSM GPRS Modem Features RS232 Interface TCP IP Stackammayi9845_930467904Noch keine Bewertungen
- Design RequirementsDokument2 SeitenDesign Requirementsammayi9845_930467904Noch keine Bewertungen
- Superscripts: 2 2x 2x 2x Subscripts: X X X XDokument1 SeiteSuperscripts: 2 2x 2x 2x Subscripts: X X X Xammayi9845_930467904Noch keine Bewertungen
- Carry-Select and Conditional-Sum AddersDokument14 SeitenCarry-Select and Conditional-Sum Adderssivakumarb92Noch keine Bewertungen
- Work Flow ChartDokument3 SeitenWork Flow Chartammayi9845_930467904Noch keine Bewertungen
- February: Interfacing Multiple Sensors Using Wireless Network and Using Visual Software Display On MonitorDokument3 SeitenFebruary: Interfacing Multiple Sensors Using Wireless Network and Using Visual Software Display On Monitorammayi9845_930467904Noch keine Bewertungen
- Data Acquisition - Why 3G?Dokument3 SeitenData Acquisition - Why 3G?ammayi9845_930467904Noch keine Bewertungen
- Continued: Detection of A/D ConvertionDokument2 SeitenContinued: Detection of A/D Convertionammayi9845_930467904Noch keine Bewertungen
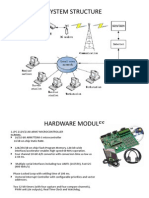
- System StructureDokument3 SeitenSystem Structureammayi9845_930467904Noch keine Bewertungen
- Lcd Interfacing with Lpc2148 MicrocontrollerDokument3 SeitenLcd Interfacing with Lpc2148 Microcontrollerammayi9845_930467904Noch keine Bewertungen
- Work plan for designing and testing a remote data acquisition systemDokument3 SeitenWork plan for designing and testing a remote data acquisition systemammayi9845_930467904Noch keine Bewertungen
- Design RequirementsDokument5 SeitenDesign Requirementsammayi9845_930467904Noch keine Bewertungen
- Agenda: Phytomonitoring System Recommended Setup Block Diagram Work Done Future Work Plan ReferenceDokument3 SeitenAgenda: Phytomonitoring System Recommended Setup Block Diagram Work Done Future Work Plan Referenceammayi9845_930467904Noch keine Bewertungen
- Future Work Plan: Tasks by MonthDokument2 SeitenFuture Work Plan: Tasks by Monthammayi9845_930467904Noch keine Bewertungen
- Work Done Till First ReviewDokument3 SeitenWork Done Till First Reviewammayi9845_930467904Noch keine Bewertungen
- Phytomonitoring System: Data Colection Software SensorsDokument3 SeitenPhytomonitoring System: Data Colection Software Sensorsammayi9845_930467904Noch keine Bewertungen
- New Proj - SynopsisDokument2 SeitenNew Proj - Synopsisammayi9845_930467904Noch keine Bewertungen
- 1Dokument4 Seiten1ammayi9845_930467904Noch keine Bewertungen
- Swami New Proj - ProposalDokument1 SeiteSwami New Proj - Proposalammayi9845_930467904Noch keine Bewertungen
- MayaDokument1 SeiteMayaammayi9845_930467904Noch keine Bewertungen
- 1 ADokument2 Seiten1 Aammayi9845_930467904Noch keine Bewertungen
- Swami Proj. ProposalDokument1 SeiteSwami Proj. Proposalammayi9845_930467904Noch keine Bewertungen
- SynopsisDokument6 SeitenSynopsisammayi9845_930467904Noch keine Bewertungen
- Xmatchpro 64Dokument2 SeitenXmatchpro 64ammayi9845_930467904Noch keine Bewertungen
- LlcompDokument2 SeitenLlcompammayi9845_930467904Noch keine Bewertungen
- XmatcDokument3 SeitenXmatcammayi9845_930467904Noch keine Bewertungen
- Comp AnimationDokument1 SeiteComp Animationammayi9845_930467904Noch keine Bewertungen
- Image Processing and Compression TechniquesDokument16 SeitenImage Processing and Compression Techniquesammayi9845_930467904Noch keine Bewertungen
- 5GDokument20 Seiten5GshubhiNoch keine Bewertungen
- RTAI InstallDokument18 SeitenRTAI InstallPramod Kumar ReddyNoch keine Bewertungen
- KLV-21SG2 Service ManualDokument92 SeitenKLV-21SG2 Service Manualekoloski1Noch keine Bewertungen
- GSX GS ManualDokument59 SeitenGSX GS ManualUzumaki28Noch keine Bewertungen
- Unix Commands Cheat SheetDokument6 SeitenUnix Commands Cheat SheetakdenizerdemNoch keine Bewertungen
- Rainbow Six - Rogue Spear - Urban Operations - UK Manual - PCDokument18 SeitenRainbow Six - Rogue Spear - Urban Operations - UK Manual - PCAnonymous utXYfMAXNoch keine Bewertungen
- ch1 1Dokument46 Seitench1 1Rohan ChalisgaonkarNoch keine Bewertungen
- Hotel Management System SRSDokument12 SeitenHotel Management System SRSಶ್ವೇತ ಸುರೇಶ್Noch keine Bewertungen
- CCNA Practical Cisco RoutersDokument400 SeitenCCNA Practical Cisco RoutersDo Hieu93% (14)
- Analog Applications Journal Q2 2011 - Slyt409Dokument38 SeitenAnalog Applications Journal Q2 2011 - Slyt409marmotanNoch keine Bewertungen
- C 6587 PW User GuideDokument28 SeitenC 6587 PW User GuideMitica ScurtuNoch keine Bewertungen
- 1st Quarter - Periodical - Test-In - ICT 8 - 2023-2024Dokument3 Seiten1st Quarter - Periodical - Test-In - ICT 8 - 2023-2024analiza leah s nullenNoch keine Bewertungen
- Datasheet SC1000CP-XT English V10 ExtDokument4 SeitenDatasheet SC1000CP-XT English V10 ExtPikesh JainNoch keine Bewertungen
- Graduation Project: Roverbot - ThesisDokument122 SeitenGraduation Project: Roverbot - ThesisAhmed Mahdy100% (2)
- XKM.206.02.005!0!124 - Operation and Maintenance InstructionDokument49 SeitenXKM.206.02.005!0!124 - Operation and Maintenance InstructionHoàn BùiNoch keine Bewertungen
- Big Data?: Hadoop?Dokument2 SeitenBig Data?: Hadoop?msodhaniNoch keine Bewertungen
- ADPlaylistEditor3 (Network Version)Dokument42 SeitenADPlaylistEditor3 (Network Version)Dramane BonkoungouNoch keine Bewertungen
- Presentation 1Dokument5 SeitenPresentation 1TinaabisheganNoch keine Bewertungen
- Precisa 18 en PDFDokument4 SeitenPrecisa 18 en PDFaqeel1970Noch keine Bewertungen
- 3.5 Spek Data Center Dan Perangkat PendukungDokument4 Seiten3.5 Spek Data Center Dan Perangkat PendukungfatihurrizqiNoch keine Bewertungen
- 08-3471 Walker 2080 Mk2 PDFDokument2 Seiten08-3471 Walker 2080 Mk2 PDFAbdelouahab BendahmaneNoch keine Bewertungen
- Word 2010 Practice Exercise InstructionsDokument2 SeitenWord 2010 Practice Exercise Instructionspranjal singNoch keine Bewertungen
- Tec B472 MaintenanceDokument91 SeitenTec B472 MaintenancedanrimerNoch keine Bewertungen
- Practical Course For ATMEL MicrocontrollersDokument45 SeitenPractical Course For ATMEL MicrocontrollersSubhash SumanNoch keine Bewertungen
- Belt Hyunday 2.4lDokument8 SeitenBelt Hyunday 2.4lluca100% (1)
- WEG SRW 01 Hmi Interface Homem Maquina 0899.5827 Guia de Instalacao Portugues BRDokument16 SeitenWEG SRW 01 Hmi Interface Homem Maquina 0899.5827 Guia de Instalacao Portugues BRDavid PalhanoNoch keine Bewertungen
- Hexagon NutsDokument2 SeitenHexagon NutsHoang LynafNoch keine Bewertungen
- Mobile XE8Dokument364 SeitenMobile XE8Yasser N.Noch keine Bewertungen
- Ata 23 Anti Hijack PDFDokument14 SeitenAta 23 Anti Hijack PDFAaron HarveyNoch keine Bewertungen
- Premier Partner Network Europe En-UsDokument4 SeitenPremier Partner Network Europe En-UsAlaa saidNoch keine Bewertungen