Das könnte Ihnen auch gefallen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Session 7: Genetics, Experience and Financial SophisticationDokument40 SeitenSession 7: Genetics, Experience and Financial SophisticationbscjjwNoch keine Bewertungen
- Empirical Methods For Finance: Sjoerd Van Den HauweDokument27 SeitenEmpirical Methods For Finance: Sjoerd Van Den HauwebscjjwNoch keine Bewertungen
- This Content Downloaded From 154.59.124.38 On Mon, 06 Dec 2021 18:40:04 UTCDokument20 SeitenThis Content Downloaded From 154.59.124.38 On Mon, 06 Dec 2021 18:40:04 UTCbscjjwNoch keine Bewertungen
- Dynamic Programming & Reinforcement Learning: Subject 9 2021 BanditsDokument23 SeitenDynamic Programming & Reinforcement Learning: Subject 9 2021 BanditsbscjjwNoch keine Bewertungen
- 11 BayesianDokument17 Seiten11 BayesianbscjjwNoch keine Bewertungen
- The COIN-OR Optimization Suite:: Ted RalphsDokument65 SeitenThe COIN-OR Optimization Suite:: Ted RalphsbscjjwNoch keine Bewertungen
- ORCO Financial HighlightsDokument1 SeiteORCO Financial HighlightsbscjjwNoch keine Bewertungen
- BDC224 FD ADV Financial Statement A4Dokument1 SeiteBDC224 FD ADV Financial Statement A4bscjjwNoch keine Bewertungen
- Using Key Performance Indicators (Kpis) in Inclusive Insurance SupervisionDokument31 SeitenUsing Key Performance Indicators (Kpis) in Inclusive Insurance SupervisionbscjjwNoch keine Bewertungen
- The People in Your Neighborhood: Social Interactions and Mutual Fund PortfoliosDokument54 SeitenThe People in Your Neighborhood: Social Interactions and Mutual Fund PortfoliosbscjjwNoch keine Bewertungen
- Quantifying The "Merit-Order" Effect in European Electricity MarketsDokument17 SeitenQuantifying The "Merit-Order" Effect in European Electricity MarketsbscjjwNoch keine Bewertungen
- Q-Learning and Deep Q Networks (DQN)Dokument52 SeitenQ-Learning and Deep Q Networks (DQN)bscjjwNoch keine Bewertungen
- Kenneth R. French - Data Library: Fama/French Factors Six Size/book-To-Market ..Dokument2 SeitenKenneth R. French - Data Library: Fama/French Factors Six Size/book-To-Market ..bscjjwNoch keine Bewertungen
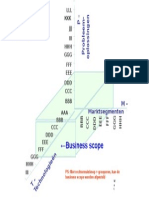
- Digitaal Business Definition Model (Abell)Dokument1 SeiteDigitaal Business Definition Model (Abell)bscjjwNoch keine Bewertungen
- This Content Downloaded From 154.59.124.38 On Mon, 06 Dec 2021 18:42:46 UTCDokument8 SeitenThis Content Downloaded From 154.59.124.38 On Mon, 06 Dec 2021 18:42:46 UTCbscjjwNoch keine Bewertungen
- Martin Hofmann's Contributions To Type Theory: Groupoids and UnivalenceDokument7 SeitenMartin Hofmann's Contributions To Type Theory: Groupoids and UnivalencebscjjwNoch keine Bewertungen
- CV Hongteng XuDokument3 SeitenCV Hongteng XubscjjwNoch keine Bewertungen
- Private Value Too Big Fail GuaranteesDokument46 SeitenPrivate Value Too Big Fail GuaranteesbscjjwNoch keine Bewertungen
- Column Generation Tutorial: Marc de Leenheer Ghent University - IBBT, Belgium University of California, Davis, USADokument23 SeitenColumn Generation Tutorial: Marc de Leenheer Ghent University - IBBT, Belgium University of California, Davis, USAbscjjwNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Practitioners Guide For Business Development Planning in FPOsDokument70 SeitenPractitioners Guide For Business Development Planning in FPOsMythreyi ChichulaNoch keine Bewertungen
- Pilot'S Operating Handbook: Robinson Helicopter CoDokument200 SeitenPilot'S Operating Handbook: Robinson Helicopter CoJoseph BensonNoch keine Bewertungen
- Amel Forms & Logging SheetsDokument4 SeitenAmel Forms & Logging SheetsisaacNoch keine Bewertungen
- A Winning Formula: Debrief For The Asda Case (Chapter 14, Shaping Implementation Strategies) The Asda CaseDokument6 SeitenA Winning Formula: Debrief For The Asda Case (Chapter 14, Shaping Implementation Strategies) The Asda CaseSpend ThriftNoch keine Bewertungen
- Mounting BearingDokument4 SeitenMounting Bearingoka100% (1)
- Overcurrent CoordinationDokument93 SeitenOvercurrent CoordinationKumar100% (1)
- Ver Notewin 10Dokument5 SeitenVer Notewin 10Aditya SinghNoch keine Bewertungen
- Belimo Fire & Smoke Damper ActuatorsDokument16 SeitenBelimo Fire & Smoke Damper ActuatorsSrikanth TagoreNoch keine Bewertungen
- SQL Datetime Conversion - String Date Convert Formats - SQLUSA PDFDokument13 SeitenSQL Datetime Conversion - String Date Convert Formats - SQLUSA PDFRaul E CardozoNoch keine Bewertungen
- CY8 C95 X 0 ADokument32 SeitenCY8 C95 X 0 AAnonymous 60esBJZIj100% (1)
- TOEFLDokument6 SeitenTOEFLSekar InnayahNoch keine Bewertungen
- V Series: Three Wheel, Counterbalanced Lift TruckDokument126 SeitenV Series: Three Wheel, Counterbalanced Lift TruckВиктор МушкинNoch keine Bewertungen
- Residential BuildingDokument5 SeitenResidential Buildingkamaldeep singhNoch keine Bewertungen
- A Comparison of Pharmaceutical Promotional Tactics Between HK & ChinaDokument10 SeitenA Comparison of Pharmaceutical Promotional Tactics Between HK & ChinaAlfred LeungNoch keine Bewertungen
- Ramp Footing "RF" Wall Footing-1 Detail: Blow-Up Detail "B"Dokument2 SeitenRamp Footing "RF" Wall Footing-1 Detail: Blow-Up Detail "B"Genevieve GayosoNoch keine Bewertungen
- Accounting II SyllabusDokument4 SeitenAccounting II SyllabusRyan Busch100% (2)
- WHO Partograph Study Lancet 1994Dokument6 SeitenWHO Partograph Study Lancet 1994Dewi PradnyaNoch keine Bewertungen
- Reference: Digital Image Processing Rafael C. Gonzalez Richard E. WoodsDokument43 SeitenReference: Digital Image Processing Rafael C. Gonzalez Richard E. WoodsNisha JosephNoch keine Bewertungen
- Is.14785.2000 - Coast Down Test PDFDokument12 SeitenIs.14785.2000 - Coast Down Test PDFVenkata NarayanaNoch keine Bewertungen
- C Sharp Logical TestDokument6 SeitenC Sharp Logical TestBogor0251Noch keine Bewertungen
- Tate Modern London, Pay Congestion ChargeDokument6 SeitenTate Modern London, Pay Congestion ChargeCongestionChargeNoch keine Bewertungen
- Preventive Maintenance - HematologyDokument5 SeitenPreventive Maintenance - HematologyBem GarciaNoch keine Bewertungen
- Agoura Hills DIVISION - 6. - NOISE - REGULATIONSDokument4 SeitenAgoura Hills DIVISION - 6. - NOISE - REGULATIONSKyle KimNoch keine Bewertungen
- Service ManualDokument30 SeitenService ManualYoni CativaNoch keine Bewertungen
- Agreement Deed BangladeshDokument8 SeitenAgreement Deed BangladeshVabna EnterpriseNoch keine Bewertungen
- MCS Valve: Minimizes Body Washout Problems and Provides Reliable Low-Pressure SealingDokument4 SeitenMCS Valve: Minimizes Body Washout Problems and Provides Reliable Low-Pressure SealingTerry SmithNoch keine Bewertungen
- INTERNSHIP PRESENTATION - Dhanya - 2020Dokument16 SeitenINTERNSHIP PRESENTATION - Dhanya - 2020Sanitha MichailNoch keine Bewertungen
- Bisleri 2.0Dokument59 SeitenBisleri 2.0Dr Amit Rangnekar100% (4)
- Brochure 2017Dokument44 SeitenBrochure 2017bibiana8593Noch keine Bewertungen
- Starkville Dispatch Eedition 12-9-18Dokument28 SeitenStarkville Dispatch Eedition 12-9-18The DispatchNoch keine Bewertungen