Das könnte Ihnen auch gefallen
- Internal Combustion Engines PDFDokument139 SeitenInternal Combustion Engines PDFShridhar RaskarNoch keine Bewertungen
- Turbocharged Engines PDFDokument72 SeitenTurbocharged Engines PDFVeler VelericNoch keine Bewertungen
- Car Maintainer, Group B: Passbooks Study GuideVon EverandCar Maintainer, Group B: Passbooks Study GuideNoch keine Bewertungen
- AutoCAD Electrical 2024: A Tutorial Approach, 5th EditionVon EverandAutoCAD Electrical 2024: A Tutorial Approach, 5th EditionNoch keine Bewertungen
- Plug-In Hybrid Electric Vehicles The Ultimate Step-By-Step GuideVon EverandPlug-In Hybrid Electric Vehicles The Ultimate Step-By-Step GuideNoch keine Bewertungen
- Design for additive manufacturing A Clear and Concise ReferenceVon EverandDesign for additive manufacturing A Clear and Concise ReferenceNoch keine Bewertungen
- SolidWorks 2017 Black Book: SolidWorks Black BookVon EverandSolidWorks 2017 Black Book: SolidWorks Black BookBewertung: 3.5 von 5 Sternen3.5/5 (3)
- Design and Analysis of Composite Structures for Automotive Applications: Chassis and DrivetrainVon EverandDesign and Analysis of Composite Structures for Automotive Applications: Chassis and DrivetrainNoch keine Bewertungen
- Crossing the Line Baja 1000: What Secrets Starts as Fortune Might Cost Him His LifeVon EverandCrossing the Line Baja 1000: What Secrets Starts as Fortune Might Cost Him His LifeNoch keine Bewertungen
- High Speed Off-Road Vehicles: Suspensions, Tracks, Wheels and DynamicsVon EverandHigh Speed Off-Road Vehicles: Suspensions, Tracks, Wheels and DynamicsNoch keine Bewertungen
- Chassis Dynamometer Testing: Addressing the Challenges of New Global LegislationVon EverandChassis Dynamometer Testing: Addressing the Challenges of New Global LegislationNoch keine Bewertungen
- Components for Pneumatic Control Instruments: The Static and Dynamic Characteristics of Pneumatic Resistances, Capacitances and Transmission LinesVon EverandComponents for Pneumatic Control Instruments: The Static and Dynamic Characteristics of Pneumatic Resistances, Capacitances and Transmission LinesNoch keine Bewertungen
- Construction and Manufacture of AutomobilesVon EverandConstruction and Manufacture of AutomobilesBewertung: 5 von 5 Sternen5/5 (1)
- SolidWorks 2015 Learn by doing-Part 2 (Surface Design, Mold Tools, and Weldments)Von EverandSolidWorks 2015 Learn by doing-Part 2 (Surface Design, Mold Tools, and Weldments)Bewertung: 4.5 von 5 Sternen4.5/5 (5)
- Farm Engines and How to Run Them The Young Engineer's GuideVon EverandFarm Engines and How to Run Them The Young Engineer's GuideNoch keine Bewertungen
- Home-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsVon EverandHome-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsNoch keine Bewertungen
- Install Oil Burner Equipment (License): Passbooks Study GuideVon EverandInstall Oil Burner Equipment (License): Passbooks Study GuideNoch keine Bewertungen
- Installing, Troubleshooting, and Repairing Wireless NetworksVon EverandInstalling, Troubleshooting, and Repairing Wireless NetworksNoch keine Bewertungen
- Certified Manufacturing Engineer A Complete Guide - 2020 EditionVon EverandCertified Manufacturing Engineer A Complete Guide - 2020 EditionNoch keine Bewertungen
- Design For Manufacturability A Complete Guide - 2021 EditionVon EverandDesign For Manufacturability A Complete Guide - 2021 EditionNoch keine Bewertungen
- The Definitive Guide to How Computers Do Math: Featuring the Virtual DIY CalculatorVon EverandThe Definitive Guide to How Computers Do Math: Featuring the Virtual DIY CalculatorNoch keine Bewertungen
- Oxy-Acetylene Welding and Cutting: Electric, Forge and Thermit Welding together with related methods and materials used in metal working and the oxygen process for removal of carbonVon EverandOxy-Acetylene Welding and Cutting: Electric, Forge and Thermit Welding together with related methods and materials used in metal working and the oxygen process for removal of carbonNoch keine Bewertungen
- Project Charger: The Step-By-Step Restoration of a Popular Vintage CarVon EverandProject Charger: The Step-By-Step Restoration of a Popular Vintage CarNoch keine Bewertungen
- Professional Microsoft SQL Server 2014 Integration ServicesVon EverandProfessional Microsoft SQL Server 2014 Integration ServicesNoch keine Bewertungen
- I'll Never Forget My First Car: Stories from Behind the WheelVon EverandI'll Never Forget My First Car: Stories from Behind the WheelBewertung: 5 von 5 Sternen5/5 (1)
- Thermal Dynamics Ultra-Cut 200 Eng-OmDokument168 SeitenThermal Dynamics Ultra-Cut 200 Eng-OmsajsigalomaNoch keine Bewertungen
- STEPPER MOTOR CONTROL USING INFERA REDMinor ProjectDokument22 SeitenSTEPPER MOTOR CONTROL USING INFERA REDMinor ProjectJet's100% (2)
- Victor Thermal Dynamics Ultra-Cut 300 PDFDokument166 SeitenVictor Thermal Dynamics Ultra-Cut 300 PDFidrovodiNoch keine Bewertungen
- Esp32-Wroom-32 Datasheet enDokument27 SeitenEsp32-Wroom-32 Datasheet enSichzeugNoch keine Bewertungen
- Design and Analysis of Camshafts (DOHC)Dokument23 SeitenDesign and Analysis of Camshafts (DOHC)Esaam Jamil0% (3)
- Design Optimisation of Space Frame ChassisDokument40 SeitenDesign Optimisation of Space Frame Chassisadj adj100% (1)
- Contamination Outgassing Characteristics of Spacecraft MaterialsDokument16 SeitenContamination Outgassing Characteristics of Spacecraft Materialsjun floresNoch keine Bewertungen
- Motor 24V 25W 3000rpmDokument17 SeitenMotor 24V 25W 3000rpmccarbajal_3Noch keine Bewertungen
- Catalog - Actassi - Part2 (En)Dokument87 SeitenCatalog - Actassi - Part2 (En)Anonymous FTBYfqkNoch keine Bewertungen
- Cad Modelling of Quartz Clock Movement Using SolidworksDokument20 SeitenCad Modelling of Quartz Clock Movement Using SolidworksUllas U100% (1)
- Shop Data - Fitting Layout For HVACDokument2 SeitenShop Data - Fitting Layout For HVACDaniel AustinNoch keine Bewertungen
- HMT Mandrel Bending 101Dokument80 SeitenHMT Mandrel Bending 101zaiofracassadoNoch keine Bewertungen
- 5 Steps in Stick WeldingDokument7 Seiten5 Steps in Stick WeldingEm Hernandez AranaNoch keine Bewertungen
- Notes - Solder E1, E2, and E3 Together, Then Paint The Whole ThingDokument68 SeitenNotes - Solder E1, E2, and E3 Together, Then Paint The Whole ThingLFoster1Noch keine Bewertungen
- Dayton Tech BalllockDokument12 SeitenDayton Tech BalllockNaukowyDrpNoch keine Bewertungen
- ShopData Quickduct CAD 2009Dokument2 SeitenShopData Quickduct CAD 2009Daniel AustinNoch keine Bewertungen
- Glow Plug Cross ReferenceDokument6 SeitenGlow Plug Cross ReferenceArturo Montes F.Noch keine Bewertungen
- Plasma WeldingDokument50 SeitenPlasma WeldingSatyam kumar UpadhyayNoch keine Bewertungen
- Autocad Hand Book First Edition CollegesDokument58 SeitenAutocad Hand Book First Edition CollegesJeketera Shadreck100% (1)
- Sheet Metal Workshop - Lab ManualDokument40 SeitenSheet Metal Workshop - Lab ManualHARSHAVARDHAN MADISHETTINoch keine Bewertungen
- Engr. Albert S. Revilla, MSERM InstructorDokument43 SeitenEngr. Albert S. Revilla, MSERM InstructorRaldge ANoch keine Bewertungen
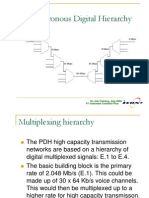
- Plesiochronous Digital Hierarchy: 2 Mbps 2 MbpsDokument46 SeitenPlesiochronous Digital Hierarchy: 2 Mbps 2 MbpsRaldge ANoch keine Bewertungen
- Modeling of Total Electromagnetic Field Distribution in Vicinity of BS ConcentrationDokument3 SeitenModeling of Total Electromagnetic Field Distribution in Vicinity of BS ConcentrationRaldge ANoch keine Bewertungen
- Multiplexing TechniquesChapter 7 PDFDokument19 SeitenMultiplexing TechniquesChapter 7 PDFDioen Biosca RojasNoch keine Bewertungen
- Telephone Losses: Net LossDokument47 SeitenTelephone Losses: Net LossRaldge ANoch keine Bewertungen
- Contract Management SAPDokument5 SeitenContract Management SAPRitesh Singh0% (1)
- Unit-4 Hadoop Distributed File System (HDFS) : SyllabusDokument17 SeitenUnit-4 Hadoop Distributed File System (HDFS) : SyllabusFrost RebbecaNoch keine Bewertungen
- Catalogo Mass Parts - Accesorios Final - 2017Dokument50 SeitenCatalogo Mass Parts - Accesorios Final - 2017Carlos Reconco100% (1)
- Tnms SNMP Nbi - Operation GuideDokument90 SeitenTnms SNMP Nbi - Operation GuideAdrian FlorensaNoch keine Bewertungen
- Project Cover Sheet-CSF 4203 Project (25%) : Higher Colleges of TechnologyDokument8 SeitenProject Cover Sheet-CSF 4203 Project (25%) : Higher Colleges of TechnologyengrrhasanNoch keine Bewertungen
- Bullet Pixels 2: by Samurai CircuitsDokument3 SeitenBullet Pixels 2: by Samurai CircuitsdinhanhminhqtNoch keine Bewertungen
- Thycotic PrivilegeManger 10.7.1 CompleteDokument586 SeitenThycotic PrivilegeManger 10.7.1 CompleteDadeNoch keine Bewertungen
- Starting and Stopping Procdure of GeneratorDokument3 SeitenStarting and Stopping Procdure of GeneratorSumit SinhaNoch keine Bewertungen
- Power System Protection Power System Stability: Substation Automation ProductsDokument15 SeitenPower System Protection Power System Stability: Substation Automation ProductsRobert Mihayo100% (1)
- Block Diagram: (LCR System: On)Dokument2 SeitenBlock Diagram: (LCR System: On)blogexplosivo1547Noch keine Bewertungen
- Zenoss Core Seminar FinalDokument28 SeitenZenoss Core Seminar Finalparuz842487Noch keine Bewertungen
- CopperHead For Infinity Tech Manual V4Dokument28 SeitenCopperHead For Infinity Tech Manual V4TelejuanNoch keine Bewertungen
- Pre Purchase InspectionsDokument9 SeitenPre Purchase InspectionsAAG AutomotiveNoch keine Bewertungen
- Online Meeting With Clients: Project GuideDokument16 SeitenOnline Meeting With Clients: Project GuideGovindaram RajeshNoch keine Bewertungen
- Welcome Letter - RobotStudio School Edition - 107670Dokument1 SeiteWelcome Letter - RobotStudio School Edition - 107670Meche HerztNoch keine Bewertungen
- 441 1105 1 PBDokument6 Seiten441 1105 1 PBblackraidenNoch keine Bewertungen
- Jan Marie Valencia Kharla Baladjay Recca Anna Laranan Rex Martin GuceDokument46 SeitenJan Marie Valencia Kharla Baladjay Recca Anna Laranan Rex Martin GuceElsie AdornaNoch keine Bewertungen
- Do Teenagers Really Need A Mobile PhoneDokument2 SeitenDo Teenagers Really Need A Mobile Phonetasya azzahraNoch keine Bewertungen
- AWS CLI Cheatsheet: SetupDokument8 SeitenAWS CLI Cheatsheet: SetupAbdelhadi ZennouNoch keine Bewertungen
- Web Designing RaviDokument18 SeitenWeb Designing RaviRavi KumarNoch keine Bewertungen
- XenServer Powershell CommandsDokument1 SeiteXenServer Powershell CommandsdealahzNoch keine Bewertungen
- Read 9780849318900 Computational Hydraulics and Hydrology An IllustDokument2 SeitenRead 9780849318900 Computational Hydraulics and Hydrology An IllustDimitri JankoskiNoch keine Bewertungen
- Bealls List of Predatory PublishersDokument38 SeitenBealls List of Predatory PublishersRandy The FoxNoch keine Bewertungen
- How To Set Up Inter Company Stock Transfer PDFDokument13 SeitenHow To Set Up Inter Company Stock Transfer PDFUfuk DoğanNoch keine Bewertungen
- 1990 Volvo 740 Wiring DiagramsDokument14 Seiten1990 Volvo 740 Wiring DiagramsDavid Cooley67% (3)
- Internship Task For Java DevelopmentDokument17 SeitenInternship Task For Java Developmentgokin36209Noch keine Bewertungen
- Soal Sastra Inggris Mid GenapDokument4 SeitenSoal Sastra Inggris Mid Genapsaiful faizinNoch keine Bewertungen
- Steer Gear 1Dokument40 SeitenSteer Gear 1gilangpasekaNoch keine Bewertungen
- VSCode Shortcuts CheatSheetDokument51 SeitenVSCode Shortcuts CheatSheetMarko TodorovicNoch keine Bewertungen
- Motorized Screw JackDokument19 SeitenMotorized Screw JackPushpendra Kumar33% (3)