Das könnte Ihnen auch gefallen
- IR Radar With Laser Shoot - SYNOPSISDokument11 SeitenIR Radar With Laser Shoot - SYNOPSISashishkvianNoch keine Bewertungen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Noch keine Bewertungen
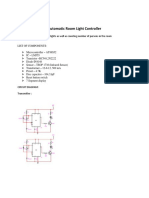
- Automatic Room Light ControllerDokument26 SeitenAutomatic Room Light ControllerdamasNoch keine Bewertungen
- Transistor Electronics: Use of Semiconductor Components in Switching OperationsVon EverandTransistor Electronics: Use of Semiconductor Components in Switching OperationsBewertung: 1 von 5 Sternen1/5 (1)
- 3Dokument34 Seiten3Ankit AgrawalNoch keine Bewertungen
- Automatic Load ControllerDokument6 SeitenAutomatic Load ControllerSreenivas GanapathiNoch keine Bewertungen
- Beginning Digital Electronics through ProjectsVon EverandBeginning Digital Electronics through ProjectsBewertung: 5 von 5 Sternen5/5 (1)
- Apuntes de Clase PICDokument117 SeitenApuntes de Clase PICJonathan FranNoch keine Bewertungen
- Line Following RobotDokument54 SeitenLine Following RobotGautam RaaviNoch keine Bewertungen
- Circuit Diagram of Mobile Controlled Home AppliancesDokument15 SeitenCircuit Diagram of Mobile Controlled Home AppliancesSubhasreeKonarNoch keine Bewertungen
- Temperature Controller Using 89c51project of E.CDokument15 SeitenTemperature Controller Using 89c51project of E.Csri kanthNoch keine Bewertungen
- Automatic Room Light Controller With Bidirectional Visitor CounterDokument37 SeitenAutomatic Room Light Controller With Bidirectional Visitor Counteramysure150% (2)
- Chapter Four Description of Automatic Water Tank Level Control SystemDokument14 SeitenChapter Four Description of Automatic Water Tank Level Control SystemDawit BirhanNoch keine Bewertungen
- MSP430 DatasheetDokument32 SeitenMSP430 DatasheetFilipe GalizaNoch keine Bewertungen
- No Touch Hand Washing Product DesignDokument14 SeitenNo Touch Hand Washing Product DesignalazarNoch keine Bewertungen
- Sumi Proj Copyprojectdoc (Repaired)Dokument13 SeitenSumi Proj Copyprojectdoc (Repaired)lucky jNoch keine Bewertungen
- EM785830AA: 8-Bit Micro-ControllerDokument43 SeitenEM785830AA: 8-Bit Micro-ControllerboleplNoch keine Bewertungen
- WWW - Atmel.in Images Doc0368Dokument19 SeitenWWW - Atmel.in Images Doc0368VipulJainNoch keine Bewertungen
- Home Security System Using Microcontroller 8051: Project Synopsis OnDokument19 SeitenHome Security System Using Microcontroller 8051: Project Synopsis OndeepeshNoch keine Bewertungen
- 8-Bit Microcontroller With 2K Bytes Flash AT89C2051: FeaturesDokument15 Seiten8-Bit Microcontroller With 2K Bytes Flash AT89C2051: FeaturesTrần Trung HiếuNoch keine Bewertungen
- Submitted To: Submitted By:: (Department of Electronics and Instrumentation Engg.)Dokument19 SeitenSubmitted To: Submitted By:: (Department of Electronics and Instrumentation Engg.)nikboy88Noch keine Bewertungen
- Datasheet Atmega 161 PDokument159 SeitenDatasheet Atmega 161 PprincebahariNoch keine Bewertungen
- Automatic Temperature ControllerDokument11 SeitenAutomatic Temperature Controllerppksn0% (1)
- 8-Bit Microcontroller With 2K Bytes Flash AT89C2051: FeaturesDokument15 Seiten8-Bit Microcontroller With 2K Bytes Flash AT89C2051: FeaturesGomzalez Bin GembozNoch keine Bewertungen
- Application Note ATtiny32Dokument13 SeitenApplication Note ATtiny32Neeraj MauryaNoch keine Bewertungen
- Arduino Uno r3 PDFDokument9 SeitenArduino Uno r3 PDFAnonymous ytZsBOVNoch keine Bewertungen
- Arduino Uno r3 PDFDokument9 SeitenArduino Uno r3 PDFDANIEL ALEJANDRO LEMUS RINCONNoch keine Bewertungen
- Arduino Uno r3Dokument9 SeitenArduino Uno r3Danies Forensky IrawanNoch keine Bewertungen
- SSFDFDokument9 SeitenSSFDFMaycol ParicahuaNoch keine Bewertungen
- Arduino Uno r3 PDFDokument9 SeitenArduino Uno r3 PDFKosehati FarmNoch keine Bewertungen
- Arduino Uno r3 DatasheetDokument9 SeitenArduino Uno r3 DatasheetAndreea IlieNoch keine Bewertungen
- Automatic Room Light ControllerDokument36 SeitenAutomatic Room Light Controllerlove2honney100% (1)
- EMBEDDED BASED Automatic AUDITORIUM CONTROLLER 0TH REVDokument36 SeitenEMBEDDED BASED Automatic AUDITORIUM CONTROLLER 0TH REVspringsource100% (1)
- DC Motor Control ReportDokument21 SeitenDC Motor Control ReportNishant SinghNoch keine Bewertungen
- DIY k148Dokument5 SeitenDIY k148Mayeh BalicoNoch keine Bewertungen
- ProjectDokument30 SeitenProjectDEXTROSITY1234Noch keine Bewertungen
- VarshaDokument46 SeitenVarshavarshaNoch keine Bewertungen
- Home/Office Security SystemDokument22 SeitenHome/Office Security SystemKirtika PrakashNoch keine Bewertungen
- MICROCONTROLLER-based DC Motor Speed ControllerDokument8 SeitenMICROCONTROLLER-based DC Motor Speed Controllerranjithsim100% (1)
- 8-Bit Microcontroller With 2K Bytes Flash AT89C2051: FeaturesDokument14 Seiten8-Bit Microcontroller With 2K Bytes Flash AT89C2051: FeaturesMinhdung PhanNoch keine Bewertungen
- Pic16c505-04 P075Dokument80 SeitenPic16c505-04 P075mixtekingNoch keine Bewertungen
- Gas Leakage Alerting System in IndustriesDokument44 SeitenGas Leakage Alerting System in IndustriesGanesan S BENoch keine Bewertungen
- At89c2051 Data SheetDokument44 SeitenAt89c2051 Data SheetRavi AhirwarNoch keine Bewertungen
- 8-Bit Microcontroller With 2K Bytes Flash AT89C2051: FeaturesDokument24 Seiten8-Bit Microcontroller With 2K Bytes Flash AT89C2051: FeaturesVibhor KaushikNoch keine Bewertungen
- Index: Objective Introduction Circuit Description List of Components Circuit Diagram Components DescriptionDokument19 SeitenIndex: Objective Introduction Circuit Description List of Components Circuit Diagram Components DescriptionKrishnaBihariShuklaNoch keine Bewertungen
- MSP430C11x1, MSP430F11x1A Mixed Signal Microcontroller: DescriptionDokument43 SeitenMSP430C11x1, MSP430F11x1A Mixed Signal Microcontroller: DescriptionHaks HaxNoch keine Bewertungen
- Cetpa Infotech Pvt. LTD: Department of Embedded SystemDokument49 SeitenCetpa Infotech Pvt. LTD: Department of Embedded SystemsknagarNoch keine Bewertungen
- Occupancy Based Fan Speed ControllerDokument28 SeitenOccupancy Based Fan Speed ControllerVinay MishraNoch keine Bewertungen
- Print OutDokument13 SeitenPrint Outnazece08Noch keine Bewertungen
- Data SheetDokument11 SeitenData SheetRichard MachadoNoch keine Bewertungen
- Project ReportDokument14 SeitenProject ReportNoah100% (7)
- SLS11Dokument27 SeitenSLS11maneeshNoch keine Bewertungen
- MC9S08SG8Dokument316 SeitenMC9S08SG8Juan CarlosNoch keine Bewertungen
- 6th Central Pay Commission Salary CalculatorDokument15 Seiten6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Accounting FlexfieldDokument2 SeitenAccounting Flexfieldprem_dreams4uNoch keine Bewertungen
- R12 Oracle Project AccountingDokument8 SeitenR12 Oracle Project Accountingprem_dreams4uNoch keine Bewertungen
- Wireless SwitchDokument2 SeitenWireless Switchprem_dreams4uNoch keine Bewertungen
- BIM Applications of Rule-Based Checking in ConstruDokument9 SeitenBIM Applications of Rule-Based Checking in ConstrumounirNoch keine Bewertungen
- Multiple-Choice QuestionsDokument8 SeitenMultiple-Choice Questionsvijayganesh pinisettiNoch keine Bewertungen
- Acumen Fuse User GuideDokument124 SeitenAcumen Fuse User Guideomda4wady0% (1)
- Datasheet For ATC2603C V2.1Dokument141 SeitenDatasheet For ATC2603C V2.1Ha Long ThangNoch keine Bewertungen
- Infinera Ebook Packet OpticalDokument57 SeitenInfinera Ebook Packet OpticalRamon CuevasNoch keine Bewertungen
- MasterRC Pile Cap DesignDokument4 SeitenMasterRC Pile Cap DesignAl-Ain HomesNoch keine Bewertungen
- Collibra Prescriptive Path v2Dokument4 SeitenCollibra Prescriptive Path v2AhamedSharifNoch keine Bewertungen
- Sarmasoftwareservices-Hyderabad. Mobile:9949210713. MM Process FlowDokument4 SeitenSarmasoftwareservices-Hyderabad. Mobile:9949210713. MM Process FlowSARMANoch keine Bewertungen
- Paragon Hard Disk Manager Pro 2009 Portable Rar PDFDokument4 SeitenParagon Hard Disk Manager Pro 2009 Portable Rar PDFDanNoch keine Bewertungen
- Regional Development Plan PDFDokument16 SeitenRegional Development Plan PDFAlexandra FricosuNoch keine Bewertungen
- Valuation: Philippine Residential Broadband MarketDokument5 SeitenValuation: Philippine Residential Broadband MarketNico Angeles MenesesNoch keine Bewertungen
- K.Surya Rao: Curriculum VitaeDokument6 SeitenK.Surya Rao: Curriculum Vitaenaveen_spy122Noch keine Bewertungen
- 7) Progress PaymentDokument5 Seiten7) Progress Paymentkerwin jayNoch keine Bewertungen
- 1.1 Notes - Functional Elements of An InstrumentDokument4 Seiten1.1 Notes - Functional Elements of An InstrumentB. MeenakshiNoch keine Bewertungen
- Analog Output Capacitive Proximity Sensors: Sensing SpecificationsDokument2 SeitenAnalog Output Capacitive Proximity Sensors: Sensing SpecificationsHpnoteNoch keine Bewertungen
- Chapter 7 E Business SystemsDokument35 SeitenChapter 7 E Business Systemsarif213002Noch keine Bewertungen
- Specsheet 3516 1825 kVA PrimeDokument6 SeitenSpecsheet 3516 1825 kVA PrimeYusman EkaNoch keine Bewertungen
- User Manual For Retail Sales-SAP-14jan2016Dokument21 SeitenUser Manual For Retail Sales-SAP-14jan2016Abijit BhowmikNoch keine Bewertungen
- The It Audit ProcessDokument38 SeitenThe It Audit Processalbert moldonNoch keine Bewertungen
- General Tire Supply Chain ProcessDokument3 SeitenGeneral Tire Supply Chain ProcessSyed Burhan AhmadNoch keine Bewertungen
- Demand Response and Advanced Metering: Modernizing The Electric GridDokument29 SeitenDemand Response and Advanced Metering: Modernizing The Electric GridFaaez Ul HaqNoch keine Bewertungen
- LO 2. Use FOS Tools, Equipment, and ParaphernaliaDokument5 SeitenLO 2. Use FOS Tools, Equipment, and ParaphernaliaReymond SumayloNoch keine Bewertungen
- Value Engineering - Prof. Emad ShublaqDokument52 SeitenValue Engineering - Prof. Emad Shublaqmalikasal100% (1)
- Bullet Pixels 2: by Samurai CircuitsDokument3 SeitenBullet Pixels 2: by Samurai CircuitsdinhanhminhqtNoch keine Bewertungen
- Fuse Box Diagram Toyota Camry (XV40 2007-2011)Dokument13 SeitenFuse Box Diagram Toyota Camry (XV40 2007-2011)Zool Car زول كار0% (2)
- Huawei SE1000 Series Enterprise SBC Data SheetDokument4 SeitenHuawei SE1000 Series Enterprise SBC Data Sheetarranguezjr5991Noch keine Bewertungen
- Features Description: LTC4315 2-Wire Bus Buffer With High Noise MarginDokument20 SeitenFeatures Description: LTC4315 2-Wire Bus Buffer With High Noise MarginMoritery miraNoch keine Bewertungen
- Electric Pressure Cookers Training ManualDokument25 SeitenElectric Pressure Cookers Training ManualLa perrritaaaNoch keine Bewertungen
- Xtrapower Nigeria Inverter and Battery 2021 U.S.E. Price - Feb-1Dokument3 SeitenXtrapower Nigeria Inverter and Battery 2021 U.S.E. Price - Feb-1Iyaka JamesNoch keine Bewertungen
- Cisco 9396tx n9k c9396txDokument13 SeitenCisco 9396tx n9k c9396txDejan JovanovicNoch keine Bewertungen
- Pressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedVon EverandPressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedBewertung: 5 von 5 Sternen5/5 (1)
- Building Physics -- Heat, Air and Moisture: Fundamentals and Engineering Methods with Examples and ExercisesVon EverandBuilding Physics -- Heat, Air and Moisture: Fundamentals and Engineering Methods with Examples and ExercisesNoch keine Bewertungen
- A Place of My Own: The Architecture of DaydreamsVon EverandA Place of My Own: The Architecture of DaydreamsBewertung: 4 von 5 Sternen4/5 (242)
- The Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialVon EverandThe Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialNoch keine Bewertungen
- How to Estimate with RSMeans Data: Basic Skills for Building ConstructionVon EverandHow to Estimate with RSMeans Data: Basic Skills for Building ConstructionBewertung: 4.5 von 5 Sternen4.5/5 (2)
- Building Construction Technology: A Useful Guide - Part 1Von EverandBuilding Construction Technology: A Useful Guide - Part 1Bewertung: 4 von 5 Sternen4/5 (3)
- The Aqua Group Guide to Procurement, Tendering and Contract AdministrationVon EverandThe Aqua Group Guide to Procurement, Tendering and Contract AdministrationMark HackettBewertung: 4 von 5 Sternen4/5 (1)
- The Complete Guide to Building With Rocks & Stone: Stonework Projects and Techniques Explained SimplyVon EverandThe Complete Guide to Building With Rocks & Stone: Stonework Projects and Techniques Explained SimplyBewertung: 4 von 5 Sternen4/5 (1)
- Principles of Welding: Processes, Physics, Chemistry, and MetallurgyVon EverandPrinciples of Welding: Processes, Physics, Chemistry, and MetallurgyBewertung: 4 von 5 Sternen4/5 (1)
- Estimating Construction Profitably: Developing a System for Residential EstimatingVon EverandEstimating Construction Profitably: Developing a System for Residential EstimatingNoch keine Bewertungen
- Civil Engineer's Handbook of Professional PracticeVon EverandCivil Engineer's Handbook of Professional PracticeBewertung: 4.5 von 5 Sternen4.5/5 (2)
- Post Weld Heat Treatment PWHT: Standards, Procedures, Applications, and Interview Q&AVon EverandPost Weld Heat Treatment PWHT: Standards, Procedures, Applications, and Interview Q&ANoch keine Bewertungen
- The Complete Guide to Building Your Own Home and Saving Thousands on Your New HouseVon EverandThe Complete Guide to Building Your Own Home and Saving Thousands on Your New HouseBewertung: 5 von 5 Sternen5/5 (3)
- Woodworking: 25 Unique Woodworking Projects For Making Your Own Wood Furniture and Modern Kitchen CabinetsVon EverandWoodworking: 25 Unique Woodworking Projects For Making Your Own Wood Furniture and Modern Kitchen CabinetsBewertung: 1 von 5 Sternen1/5 (4)
- 1,001 Questions & Answers for the CWI Exam: Welding Metallurgy and Visual Inspection Study GuideVon Everand1,001 Questions & Answers for the CWI Exam: Welding Metallurgy and Visual Inspection Study GuideBewertung: 3.5 von 5 Sternen3.5/5 (7)
- The Everything Woodworking Book: A Beginner's Guide To Creating Great Projects From Start To FinishVon EverandThe Everything Woodworking Book: A Beginner's Guide To Creating Great Projects From Start To FinishBewertung: 4 von 5 Sternen4/5 (3)
- History of Smart Textiles: A Comprehensive Guide To E-TextilesVon EverandHistory of Smart Textiles: A Comprehensive Guide To E-TextilesNoch keine Bewertungen
- Essential Building Science: Understanding Energy and Moisture in High Performance House DesignVon EverandEssential Building Science: Understanding Energy and Moisture in High Performance House DesignBewertung: 5 von 5 Sternen5/5 (1)
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsVon EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsBewertung: 3.5 von 5 Sternen3.5/5 (3)
- Field Guide for Construction Management: Management by Walking AroundVon EverandField Guide for Construction Management: Management by Walking AroundBewertung: 4.5 von 5 Sternen4.5/5 (3)
- Power Electronics Diploma Interview Q&A: Career GuideVon EverandPower Electronics Diploma Interview Q&A: Career GuideNoch keine Bewertungen